人机协作砌墙机器人的制作方法
[0001]
本实用新型涉及建筑技术领域,尤其涉及一种对人机协作砌墙机器人。
背景技术:
[0002]
由于建筑施工砌墙工艺的劳动强度高、环境恶劣、作业枯燥等而导致了施工的用工荒,越来越少的人员参与砌墙等的施工作业中,这对房屋建造及各种基建造成了极大的影响。为了解决这个问题,结合实际的施工环境及目前的科学发展技术,一种高效人机助力砌墙系统方案是减少人力投入、提高施工效率及质量、保证施工人员安全的有效措施。为了保证单元墙体砌筑的流畅性及高效率,助力砌墙机在完成单元砌筑过程中,尽量减少设备本体的移动,不能因为助力设备的投入而导致整个砌筑消效能的降低。
技术实现要素:
[0003]
为了达到上述技术目的,本实用新型实施例提供了人机协作砌墙机器人。
[0004]
一种人机协作砌墙机器人,包括:包括砌墙机械臂及作业区域指示系统,所述砌墙机械臂包括移动底盘、与所述移动底盘固定的支撑立柱、与所述支撑立柱固定的助力机构以及与所述助力机构固定的夹持器,所述助力机构包括一与所述支撑立柱垂直的支撑臂以及能沿所述支撑臂延伸且与所述夹持器连接的绳索,所述助力机构能收放所述绳索伸缩以提起或者放下砌块,所述作业区域指示系统固定于所述支撑立柱且包括一发光源,所述发光源用于在地面形成一光圈,所述光圈限定一作业区,所述作业区为所述夹持器能到达的区域。
[0005]
在一个优选实施方式中,所述支撑臂能相对所述立柱转动。
[0006]
在一个优选实施方式中,所述支撑臂为长度可调整式折臂。
[0007]
在一个优选实施方式中,所述支撑臂包括第一折臂及第二折臂,且所述第二折臂与第一折臂转动连接固定。
[0008]
在一个优选实施方式中,所述支撑臂为多级套筒式。
[0009]
在一个优选实施方式中,所述发光源为圆环形状。
[0010]
在一个优选实施方式中,所述发光源环绕所述支撑立柱设置。
[0011]
在一个优选实施方式中,所述作业区域指示系统还包括导光罩与反光板,所述导光罩包括上罩与下罩,所述上罩、下罩及反光板均环绕所述基柱设置,所述上罩及下罩分别包括环状侧壁,所述发光源设置于所述上罩与所述下罩之间,所述反光板设置于上罩上方,所述发光源发出的光束从所述上罩与下罩之间的开口出射,经过所述反光板的反射后在地面形成所述光圈。
[0012]
在一个优选实施方式中,所述发光源为led或者激光。
[0013]
与现有技术相比,本实用新型具有如下有益效果:本实用新型的人机协作砌墙机器人包括发光源,所述发光源用于在地面形成一光圈,所述光圈限定一作业区,所述作业区为所述夹持器能到达的区域,从而施工人员能将砌砖码放在作业区域内,从而方便了夹持
器的夹持,提高了砌墙的效率。
附图说明
[0014]
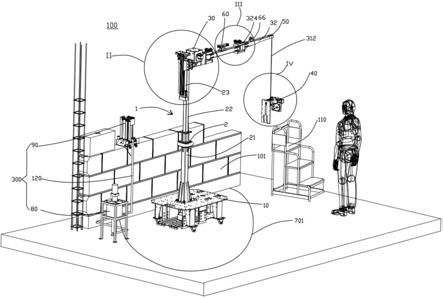
图1是本实用新型提供的人机协作砌墙机器人一实施例的结构示意图。
[0015]
图2是本实用新型提供的人机协作砌墙机器人一实施例的又一结构示意图。
[0016]
图3是图1提供的人机协作砌墙机器人ii区域的放大示意图。
[0017]
图4是图1提供的人机协作砌墙机器人iii区域的放大示意图。
[0018]
图5是图1提供的人机协作砌墙机器人vi区域的放大示意图。
[0019]
图6是图1提供的人机协作砌墙机器人的前视图。
[0020]
图7是图1提供的人机协作砌墙机器人的俯视图。
[0021]
图8是图1提供的人机协作砌墙机器人包括的作业区域指示系统的放大结构图。
[0022]
主要元件符号说明
[0023]
[0024]
[0025]
具体实施方式
[0026]
为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
[0027]
请参阅图1-5,其中,图1-2是本实用新型提供的人机协作砌墙机器人一实施例的示意图。图3是图1提供的人机协作砌墙机器人ii区域的放大示意图。图4是图1提供的人机协作砌墙机器人iii区域的放大示意图。
[0028]
本实用新型实施例提供的一种人机协作砌墙机器人100,包括砌墙机械臂1 及作业区域指示系统2。
[0029]
所述砌墙机械臂1包括移动底盘10、与所述移动底盘10固定的支撑立柱20、与所述支撑立柱20固定的助力机构30以及与所述助力机构30固定的夹持器40。
[0030]
所述移动底盘10包括多个滚轮及用于对滚轮固定的刹车结构。在移动底盘 10上设置滚轮方便移动所述人机协作砌墙机器人100。
[0031]
所述移动底盘10中设置有供电装置(图未示),所述供电装置为支撑立柱 20、助力
机构30以及夹持器40提供电能。所述供电装置可以为蓄电池。
[0032]
请参阅1-3及图5,所述支撑立柱20包括与所述移动底盘10固定的基柱 21,套设于所述基柱21中的伸缩柱22以及与所述伸缩柱22的其中一个侧表面固定的顶天结构23。所述顶天结构23包括与所述伸缩柱22固定的导轨230以及与导轨230配合固定的滑动部232。所述滑动部232在导轨230上滑动时,其长度能使其滑动时其顶端能顶住天花板。如此,所述滑动部232的顶端顶住天花板,移动底盘10抵住地面,从而使移动底盘10及滑动部232实现了与底面及天花板的稳固固定,能防止支撑立柱20的晃动。所述伸缩柱22与所述顶天结构23的升降顺序可以依据设计而定,并采用一键自动完成。所述顶天结构23 能根据天花板的高度确定升降高度。
[0033]
所述助力机构30包括提升器31以及支撑臂32。所述支撑臂32的延伸方向与所述支撑立柱20垂直。所述支撑臂32远离所述支撑立柱20的末端设置有第三定位结构50。所述提升器31包括电机以及与所述电机固定的绳索312,所述绳索312沿支撑臂32的方向伸展并穿过所述第三定位结构50后固定所述夹持器40。在本实施方式中,所述提升器31为卷扬机。
[0034]
在本实施方式中,所述第三定位结构50为滑轮。
[0035]
所述支撑臂32能相对所述支撑立柱20转动。
[0036]
在一个优选实施方式中,所述支撑臂32为长度可调整式折臂。
[0037]
进一步地,所述支撑臂32为多级套筒式,在砌筑时可以依据实际的作业范围调整支撑臂32的伸展长度。
[0038]
在本实施方式中,所述支撑臂32包括第一折臂322及第二折臂326。所述第二折臂326与第一折臂322转动连接,如此设置,提高了支撑臂32的自由度,使支撑臂32能伸长不同的长度及弯折不同的角度,以能夹取不同距离的砌块 101。
[0039]
更具体地,所述支撑臂32包括与所述伸缩柱22固定的第一连接座320、与所述第一连接座320枢接的第一折臂322、与所述第一折臂322固定的第二连接座324以及与第二连接座324枢接的第二折臂326,第一连接座320与所述顶天结构23分别固定于所述伸缩柱22的相背两个表面,所述第一折臂322能相对所述第一连接座320转动,所述第二折臂326能相对所述第二连接座324转动。
[0040]
所述提升器31固定于所述第一连接座320。所述第一连接座320、所述第二连接座324、所述第一折臂322、所述第二折臂326上分别设置有第一定位结构60,所述绳索312与所述提升器31连接后绕过多个所述第一定位结构60后与所述夹持器40固定。
[0041]
请再次参阅图3,在本实施方式中,所述第一定位结构60包括安装座61、转动盘62、绕线轮63以及限位板65。所述安装座61与所述支撑臂32固定,所述转动盘62设置于所述安装座61且能相对所述安装座61转动,所述转动盘 62上设置有两个间隔的定位柱64,所述绕线轮63穿设所述定位柱64且其两端夹设于所述转动盘62与所述限位板65之间,也即两个所述绕线轮63的中心轴相平行,所述绕线轮63能相对所述定位柱64转动。
[0042]
在本实施方式中,所述第一定位结构60的数量为三个,三个第一定位结构 60分别设置于所述第一连接座320、所述第二连接座324及所述第一折臂322 上。
[0043]
在本实施方式中,还包括设置于第二折臂326上的一个换向轮66,所述换向轮66用于改变所述绳索312的方向,将绳索312延伸的方向由水平位置向竖直转换。
[0044]
请参阅图4,所述夹持器40包括本体41、位于本体41相对两端的第一夹持板42及第
二夹持板43以及驱动部(图未示)。所述本体41包括分别与第二夹持板43垂直的两个侧面,每个侧面上分别设置有滑轨44以及沿滑轨44移动的滑块45,所述本体41还包括u型的固定板46,所述固定板46的相对两端分别与两个所述滑块45固定,所述固定板46的底部与所述第二夹持板43固定,所述固定板46随着所述滑块45的移动带动第二夹持板43向靠近或者远离第一夹持板42的方向移动。在本实施方式中,由于是需要施工人员操纵所述夹持器 40,也即,需要施工人员实现夹持器40的定位以将砌块101放至预定位置,所以,所述夹持器40上还可以设置把手,当夹持器40夹持砌块101后,便于操纵人员握持把手将砌块101放至预定位置。
[0045]
所述夹持器40上设置有第一控制按钮(图未示)及第二控制按钮(图未示),所述第一控制按钮与所述驱动部电性连接用于控制第二夹持板43相对第一夹持板42的移动以夹持不同厚度的砌块101,第二控制按钮用于控制所述提升器收放绳索312,以实现夹持器40的升降。施工人员控制所述第一控制按钮第二控制按钮就可以实现所述夹持器40升降及夹砖动作。
[0046]
请一并参阅图6-7,所述作业区域指示系统2固定于所述支撑立柱且包括一发光源70。所述发光源70用于在地面形成一光圈701,所述光圈701限定一作业区,所述作业区为所述夹持器能到达的区域。
[0047]
所述发光源70可以为激光投影装置,开启时能直接在地面上投射一预定尺寸范围的光圈701。
[0048]
在本实施方式中,所述作业区域指示系统2还包括导光罩71与反光板72,所述导光罩71包括上罩710与下罩,所述上罩710、下罩及反光板72均环绕所述基柱21设置。所述上罩710及下罩分别包括环状侧壁714,所述发光源70设置于所述上罩710与所述下罩712之间,所述反光板72设置于上罩710上方,所述发光源70发出的光束从所述上罩710与下罩712分别包括的环状侧壁之间的开口出射,经过所述反光板72的反射后在地面形成所述光圈701。所述发光源70为led或者激光。
[0049]
总之,可以理解,所述作业区域指示系统2不限于本实施方式提供的形状,只要能以支撑立柱为中心,在地面上形成光圈即可。
[0050]
本实用新型涉及的一种人机协作砌墙机器人在用于砌墙时,其包括如下步骤:
[0051]
第一步:提供如上所述的人机协作砌墙机器人100;
[0052]
第二步:将所述人机协作砌墙机器人100布置于所述待砌筑墙体的一侧的中间位置;
[0053]
第三步:开启所述发光源70,在地面形成光圈701,所述待砌筑墙体位于所述光圈701内;
[0054]
第四步:在所述光圈701内堆垛砌块;以及
[0055]
第五步:利用所述人机协作砌墙机器人100进行夹持砌块并进行砌筑。
[0056]
在本实施方式中,当所述人机协作砌墙机器人100用于砌墙时,还包括提供自动灰缝抹浆装置300。所述自动灰缝抹浆装置300用于在砌块进行砌筑时在砌块表面上涂抹砂浆。所述自动灰缝抹浆装置300包括砂浆输送机80、灰缝抹浆机90以及连接于所述砂浆输送机80、所述灰缝抹浆机90之间的输料管120。所述砂浆输送机80用于产生砂浆,所述输料管120用于将所述砂浆输送机80 产生的砂浆输出至所述灰缝抹浆机90。所述灰缝抹浆机90设
置于砌块101上,所述灰缝抹浆机90在砌块101完成定位后,在砌块101上运动以实现水平灰缝及竖直灰缝的涂抹。
[0057]
以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1