一种钢筋绑扎靠近机构的制作方法
1.本实用新型涉及一种移动车体,尤其涉及一种能交替在相互垂直的方向上行走的钢筋绑扎靠近机构。
背景技术:
2.随着城市化进程的快速推进,国家需要建造越来越多的高层建筑、铁路和核电站等大型建筑。在建造大型建筑时,不可避免地需要用到钢筋混凝土结构,钢筋混凝土结构作为建筑的主要框架,能够为建筑提供主要的支撑作用。在形成钢筋混凝土结构前,需要先将多根钢筋绑扎成钢筋框架,以形成大直径的钢筋网片。目钢筋绑扎目前主要采用的方式是人工手动捆扎和小型手持式钢筋捆扎机,其中人工手动捆扎费事费力,效率低下,而另一种小型手持式钢筋捆扎机,又叫全自动钢筋捆扎机,内部设有微控制器,能够自动完成钢筋捆扎的所有步骤,是一种智能化手持式钢筋快速捆扎工具。钢筋捆扎机主要由机体、专用线盘、电池盒、充电器四部分组成。虽然小型手持式钢筋捆扎机的速度相对人工捆扎有所提高,但是在钢筋捆扎过程中只能一个人手持一台捆扎机单次单个的捆扎,而且需要工作人员反复的弯腰起蹲操作,会对工作人员身体造成伤害,效率也不是很理想。
技术实现要素:
3.为了达到上述技术目的,本实用新型提供了一种钢筋绑扎靠近机构。所述钢筋绑扎靠近机构能作为钢筋捆扎机器人的底座,也即,在钢筋绑扎靠近机构上设置自动钢筋捆扎机,利用钢筋绑扎靠近机构带着自动钢筋捆扎机实现绑钢筋的动作。
4.一种钢筋绑扎靠近机构,其包括:
5.座体;所述座体包括一支撑板,所述支撑板与所述座体垂直固定,所述支撑板包括相对的第一表面及第二表面,所述支撑板还包括贯穿所述第一表面及第二表面的贯穿孔,所述第二表面包括有相对水平方向倾斜设置的滑轨;
6.运动部,所述运动部与所述滑轨配合,所述运动部背离所述第二表面的表面设置有固定轴;
7.驱动结构,所述驱动结构与所述运动部连接以驱动所述运动部沿所述滑轨滑动;以及
8.用于固定自动绑扎机的摆动臂,所述摆动臂套设于所述固定轴且能相对所述固定轴转动。
9.在一个优选实施方式中,所述驱动部包括电机、曲柄及连杆,所述电机的驱动轴自所述第一表面向第二表面从所述贯穿孔伸出后与所述曲柄的一端连接,所述连杆的两端分别连接所述固定轴及曲柄的另一端。
10.在一个优选实施方式中,所述钢筋绑扎机靠近机构还包括连接板,所述连接板与所述固定轴穿过所述连杆的一端固定,所述摆动臂通过轴承与所述连接板固定,所述摆动臂用于固定自动绑扎机,所述摆动臂能相对所述连接板转动。
11.在一个优选实施方式中,所述钢筋绑扎靠近机构还包括微动开关,所述钢筋绑扎靠近机构在使用时固定于钢筋网行走机构,所述微动开关与钢筋网行走机构的电源模块通信连接,所述微动开关与所述连接板的侧面固定,所述摆动臂在竖直状态时所述微动开关包括的弹片与所述摆动臂的侧壁接触,所述摆动臂在受到碰撞时所述微动开关能触发固定所述所述钢筋绑扎靠近机构的钢筋网行走机构断电。
12.在一个优选实施方式中,所述钢筋绑扎靠近机构还包括缓冲结构,所述缓冲结构固定于连接板,所述缓冲结构与所述微动开关分别位于所述摆动臂的摆动方向的相对两侧。
13.在一个优选实施方式中,所述缓冲结构包括固定块以及与固定块固定的多个弹性伸缩柱,所述弹性伸缩柱抵持所述摆动臂的侧壁。
14.在一个优选实施方式中,所支撑板12的上端、所述滑轨外侧间隔设置有第一光电感测器及第二光电感测器,所述运动部上设置有感测片,第一光电感测器与第二光电感测器能分别发/收光信号,第一光电感测器、第二光电感测器及所述感测片用于限定所述运动部在所述滑轨上的滑行区间。
15.在一个优选实施方式中,所述钢筋绑扎靠近机构还包括两个安装座,所述安装座包括u型槽口,所述第一光电感测器与第二光电感测器分别设置于所述安装座的槽口。
16.在一个优选实施方式中,所述感测片为l型的金属片,所述感测片的一端与运动部固定,所述感测片的另一端与所述运动部的侧面间隔设置。
17.在一个优选实施方式中,所述连接板上还设置有与所述微动开关电性连接的警报器,用于当所述微动开关的弹片与所述摆动臂的侧面分离时发出警报声。
18.在一个优选实施方式中,所述连接板上还设置有固定柱,所述固定柱上设置绕线轮,所述绕线轮上缠绕有钢丝,所述绕线轮为自动绑扎机提供捆绑钢筋的钢丝。
19.与现有技术相比,本实用新型具有如下有益效果:本实用新型提供的钢筋绑扎靠近机构能携带自动钢筋捆扎机沿预设的轨道运动,从上往下运动时能使自动钢筋捆扎机的执行端夹持交叉点以对交叉点进行捆扎,将钢筋绑扎靠近机构设置在行走机构上,就能实现钢筋绑扎的自动化。
附图说明
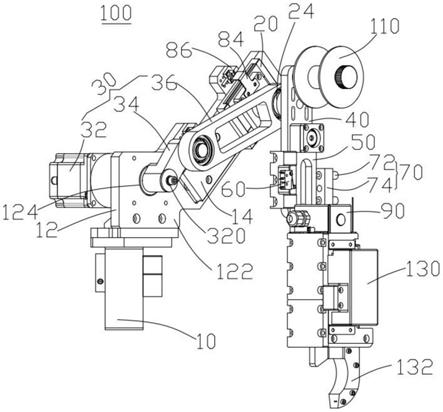
20.图1是本实用新型第一实施例提供的钢筋绑扎靠近机构的结构示意图。
21.图2是图1提供的钢筋绑扎靠近机构的驱动机构驱动所述运动部运动中的一个状态示意图。
22.图3是图1提供的钢筋绑扎靠近机构的圆形区域iii的放大结构示意图。
23.主要元件符号说明
24.25.具体实施方式
26.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
27.请参阅图,为本实用新型提供的一种钢筋绑扎靠近机构100,所述钢筋绑扎靠近机构100用于固定自动绑扎机130以替代人工实现钢筋网包括的横纵钢筋形成的交叉点的捆扎。所述钢筋绑扎靠近机构100包括:座体10、运动部20、驱动结构30、连接板40、用于安装自动绑扎机130的摆动臂50、微动开关60、缓冲结构70、第一光电感测器80、第二光电感测器82及感测片84。
28.所述座体10的底表面安装于一个钢筋网行走机构(图未示)上,从而可以通过钢筋网行走机构带着钢筋绑扎靠近机构100在钢筋网上行走。
29.所述座体10具有一支撑板12。所述支撑板12与所述座体10的上表面垂直且竖直设置。所述支撑板12包括相对的第一表面120及第二表面122,所述支撑板12还包括贯穿所述第一表面120及第二表面122的贯穿孔124,所述第二表面122包括有相对水平方向倾斜设置的滑轨140。
30.在本实施方式中,所述滑轨140的倾斜方向是与水平表面呈45度。如此设置,是为了使自动绑扎机130沿滑轨140的运动轨迹斜向下,每向下运动一次是斜向靠近钢筋网的交叉点,且自动绑扎机130的执行端132的开口是朝向所述交叉点的,如此,才能使自动绑扎机130的执行端实现钢丝的绑扎。
31.在本实施方式中,所述支撑板12的第二表面122设置有固定板14,所述固定板14相对所述水平方向呈45度设置,固定板14的相对两侧面分别设置所述滑轨140,两个所述滑轨140相互平行。
32.所述运动部20开设有与所述滑轨140配合的滑槽22,所述运动部20背离所述第二表面122的表面设置有固定轴24。在本实施方式中,所述运动部20为一滑块。
33.所述驱动结构30包括电机32、曲柄34及连杆36。所述电机32的驱动轴320自所述第一表面120向第二表面122从所述贯穿孔124伸出后与所述曲柄34的一端连接。
34.所述连杆36的两端分别连接所述固定轴24及曲柄34。具体地,所述曲柄34与连杆36通过轴承38连接。
35.所述连接板40与所述固定轴24穿过所述连杆36的一端固定,所述摆动臂50通过轴承与所述连接板40固定,所述摆动臂50用于固定自动绑扎机130,所述摆动臂50能相对所述连接板40转动。
36.所述摆动臂50套设于所述固定轴24穿过所述连杆36的一端且所述摆动臂50能相对所述固定轴24转动。
37.所述微动开关60固定于所述连接板40的侧面且位于所述摆动臂50的侧面,所述钢筋绑扎靠近机构100在使用时固定于钢筋网行走机构上。所述微动开关60与钢筋网行走机构的电源模块通信或者电连接。所述微动开关60与所述连接板40的侧面固定,所述摆动臂50在竖直状态时所述微动开关60包括的弹片62与所述摆动臂50的侧壁52接触,所述摆动臂50在受到碰撞时所述微动开关60能触发固定所述所述钢筋绑扎靠近机构100的钢筋网行走机构断电。
38.所述缓冲结构70固定于连接板40,所述缓冲结构70与所述微动开关60分别位于所述摆动臂50的摆动方向的相对两侧。所述缓冲结构70包括固定块72以及与固定块72固定的多个弹性伸缩柱74,弹性伸缩柱74能在孔中伸缩。所述弹性伸缩柱74抵持所述摆动臂50的侧壁52。所述缓冲结构70是用于对摆动臂50的摆动幅度进行限位。
39.所支撑板12的上端、所述滑轨140外侧间隔设置所述第一光电感测器80及第二光电感测器82。所述感测片84固定于所述运动部20上。第一光电感测器80与第二光电感测器82能分别发/收光信号。第一光电感测器80、第二光电感测器82及所述感测片84用于限定所述运动部20在所述滑轨140上的滑行区间。在本实施方式中,所述钢筋绑扎靠近机构100还包括两个安装座86,所述安装座86包括u型槽口860,所述第一光电感测器80与第二光电感测器82分别设置于所述安装座86的槽口860。
40.在本实施方式中,所述感测片84为l型的金属片,所述感测片84的一端与运动部20固定,所述感测片84的另一端与所述运动部20的侧面间隔设置。所述运动部20带着所述感测片84在向上运动至第一光电感测器80,中央控制芯片会控制所述电机32停止驱动,所述运动部20带着所述感测片84在向下运动至第二光电感测器82的位置时,中央控制芯片会控制所述电机32停止驱动,如此运动部20只能在第一光电感测器80及第二光电感测器82限定的区间内运动。
41.在本实施方式中,所述连接板40上还设置有与所述微动开关60电性连接的警报器90,用于当所述微动开关60的弹片62与所述摆动臂50的侧面分离时发出警报声。
42.在本实施方式中,所述连接板40上还设置有固定柱(图未示),所述固定柱上设置绕线轮110,所述绕线轮110上缠绕有钢丝,所述绕线轮110为自动绑扎机130提供捆绑钢筋的钢丝。
43.所述钢筋绑扎靠近机构100在使用时,在所述摆动臂50上固定一个自动绑扎机130,所述钢筋绑扎靠近机构100通过所述座体10固定于钢筋网行走机构上,通过钢筋网行走机构带着所述钢筋绑扎靠近机构100在钢筋网上行走,所述钢筋网行走机构在行走时能检测钢筋交叉点的位置,当检测到距离交叉点为一预设距离时,再控制所述钢筋绑扎靠近机构100的运动部20在所述滑轨140上运动,使自动绑扎机130的执行端斜向下运动刚好至交叉点的位置,中央控制芯片通过发射脉冲信号以触发自动绑扎机130的开关执行钢筋的绑扎。
44.当自动绑扎机130的执行端132碰到障碍物时,摆动臂50会向与障碍物相反的方向摆动,从而,摆动臂50不与微动开关60的弹片62接触,此时,微动开关60会触发钢筋网行走机构的电源断电,且所述警报器90能发出警报声,等故障排除了,所述钢筋网行走机构会带着钢筋绑扎靠近机构100继续行走并绑扎。
45.综上所述,本实用新型具有如下有益效果:本实用新型提供的钢筋绑扎靠近机构100能携带自动钢筋捆扎机沿预设的轨道运动,从上往下运动时能使自动钢筋捆扎机的执行端夹持交叉点以对交叉点进行捆扎,将钢筋绑扎靠近机构设置在行走机构上,就能实现钢筋绑扎的自动化。
46.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1