一种受限停车辅助系统的制作方法
1.本实用新型涉及停车系统技术领域,特别涉及一种受限停车辅助系统。
背景技术:
2.现有技术中,对于目前市场上没有安装电子泊车辅助系统的存量车,在窄车库车位等受限空间泊车入位时,存在以下几种问题:
3.1、对于比较窄的车库或两侧已经停有车辆的窄车位,反复倒车泊车时间长,车辆停靠方向不正影响相邻车位的泊车以及泊车后驾驶人打开车门间隙不够、下车困难。
4.2、即使后期加装电子泊车系统,后期加装电子泊车系统的故障率高、使用普及率较低。
5.3、泊车过程中避障系统对于高度较低的消防栓、路基等障碍物位置识别不准确,容易发生倒车碰撞事故。
技术实现要素:
6.本实用新型提供了一种受限停车辅助系统,解决了上述技术问题。
7.本实用新型提供了一种受限停车辅助系统,包括:旋转承台、伸缩底盘和控制器;
8.所述伸缩底盘上设置有伸缩装置、承载装置、旋转电机和推杆电机;
9.所述伸缩装置与所述推杆电机相连;所述旋转电机和所述推杆电机分别设置在所述承载装置上;
10.所述旋转承台设置在所述承载装置之上;所述旋转承台在所述旋转电机的带动下在所述承载装置上旋转;
11.所述控制器与所述旋转电机相连;所述控制器与所述推杆电机相连。
12.可选地,所述伸缩装置包括:剪叉杆、连接轴销、剪叉杆支架和定位限位座;
13.所述剪叉杆通过所述连接轴销连接为一体;所述剪叉杆通过所述剪叉杆支架安装在所述定位限位座上;
14.所述剪叉杆的底部还设置有剪叉杆脚轮;
15.所述承载装置包括:承重竖梁、承重横梁、承重斜梁、推杆支架梁;所述推杆支架梁的两端设置在所述承重横梁上;
16.所述承重竖梁底部还设置有承重脚轮;
17.所述旋转电机和推杆电机安装在所述推杆支架梁上;
18.所述旋转承台包括:行车竖梁、连接横梁、行车坡板、坡板拉线和踏板格栅;
19.所述连接横梁和所述推杆支架梁之间通过旋转螺栓连接;
20.所述连接横梁与所述行车竖梁相互连接;所述行车坡板设置在所述行车竖梁的两端;所述坡板拉线设置在所述行车竖梁中,与所述行车坡板相连;所述踏板格栅设置在所述连接横梁与所述行车竖梁之上;
21.所述连接横梁的底部还设置有横梁脚轮;
22.所述控制器安装在所述踏板格栅上。
23.可选地,所述承载装置具体包括:两个承重竖梁、两个承重横梁、四个承重斜梁、一个推杆支架梁;所述推杆支架梁的两端分别连接到两个承重横梁上;
24.每个承重竖梁与每个承重横梁之间首尾相连构成一个四边形;每个承重斜梁的一端与一个承重横梁连接;另一端与一个承重竖梁连接;每个承重斜梁与其连接的承重横梁和承重竖梁之间构成一个三角形;
25.所述旋转承台具体包括:两组行车竖梁、四个连接横梁、两个行车坡板、坡板拉线和踏板格栅;
26.两组行车竖梁分设在四个连接横梁的两端;所述四个连接横梁将两组行车竖梁连接为一体;每组行车竖梁包括两个行车竖梁单元;两个行车坡板设置在两组行车竖梁的两端;靠近所述伸缩装置的两个连接横梁的底部两侧设置有横梁定向脚轮;远离所述伸缩装置的两个连接横梁的底部两侧设置有横梁万向脚轮。
27.可选地,所述旋转承台还包括:限位阻车装置;所述限位阻车装置安装行车竖梁上并邻近所述行车竖梁的一端。
28.可选地,所述限位阻车装置包括:限位阻车器和设置在限位阻车器上的阻车器动作电磁铁。
29.可选地,还包括:测距传感器和热能传感器;
30.所述控制器还与所述测距传感器和热能传感器分别相连;
31.所述测距传感器设置在所述旋转承台的周边;
32.所述热能传感器设置在所述旋转承台的周边。
33.可选地,所述承重竖梁上还安装有滑轮装置;所述行车竖梁与所述承重竖梁上对应的位置上还安装有运输吊环。
34.可选地,所述控制器包括:控制器防水外壳、控制板、dc
‑
dc降压稳压板、多路继电器和供电电路;
35.所述供电电路在在所述控制器内分成两路,一路与所述dc
‑
dc降压稳压板相连、然后依次经过所述控制板与多路继电器控制端与热能传感器和测距传感器分别相连;另一路经过多路继电器动力端与所述旋转电机和所述推杆电机分别相连。
36.可选地,还包括:遥控器;所述遥控器上设置有发出推出指令和发出回退指令的按钮。
37.可选地,还包括车库;所述旋转承台、伸缩底盘和控制器位于所述车库中;所述遥控器上还设置有开启和关闭车库车门的按钮。
38.本实用新型提供了一种受限停车辅助系统,包括:旋转承台、伸缩底盘和控制器;其中旋转承台是使用供汽车停放的旋转平台,用于拖车入位或送车出位,伸缩底盘是装焊接成的一个框架平台,用于安装推杆电机和旋转电机用于将旋转承台和伸缩底盘送出或拖回车位并提供旋转承台旋转走位,控制器于控制整体系统运行。本实用新型提供的受限停车辅助系统,均能够实现窄车库、窄车位等受限空间的精准泊车入位。
附图说明
39.图1
‑
图2是本实用新型实施例提供的一种受限停车辅助系统的整体结构示意图;
40.图3
‑
图4是本实用新型实施例提供的一种受限停车辅助系统的伸缩底盘的结构示意图;
41.图5是本实用新型实施例提供的一种受限停车辅助系统的旋转承台的部分结构示意图。
具体实施方式
42.下面将结合本实用新型中的附图,对本实用新型中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
43.实施例
44.本实施例提供了一种受限停车辅助系统,包括:旋转承台、伸缩底盘和控制器;
45.伸缩底盘上设置有伸缩装置、承载装置、旋转电机和推杆电机;
46.伸缩装置与推杆电机相连;旋转电机和推杆电机分别设置在承载装置上;
47.旋转承台设置在承载装置之上;旋转承台在旋转电机的带动下在承载装置上旋转;
48.控制器与旋转电机相连;控制器与推杆电机相连。
49.本实施例中,伸缩装置包括:剪叉杆、连接轴销、剪叉杆支架和定位限位座;
50.剪叉杆通过连接轴销连接为一体;剪叉杆通过剪叉杆支架安装在定位限位座上;
51.剪叉杆的底部还设置有剪叉杆脚轮;
52.承载装置包括:承重竖梁、承重横梁、承重斜梁、推杆支架梁;推杆支架梁的两端设置在承重横梁上;
53.承重竖梁底部还设置有承重脚轮;
54.旋转电机和推杆电机安装在推杆支架梁上;
55.旋转承台包括:行车竖梁、连接横梁、行车坡板、坡板拉线和踏板格栅;
56.连接横梁和推杆支架梁之间通过旋转螺栓连接;
57.连接横梁与行车竖梁相互连接;行车坡板设置在行车竖梁的两端;坡板拉线设置在行车竖梁中,与行车坡板相连;踏板格栅设置在连接横梁与行车竖梁之上;
58.连接横梁的底部还设置有横梁脚轮;
59.控制器安装在踏板格栅上。
60.进一步地,承载装置具体包括:两个承重竖梁、两个承重横梁、四个承重斜梁、一个推杆支架梁;推杆支架梁的两端分别连接到两个承重横梁上;
61.每个承重竖梁与每个承重横梁之间首尾相连构成一个四边形;每个承重斜梁的一端与一个承重横梁连接;另一端与一个承重竖梁连接;每个承重斜梁与其连接的承重横梁和承重竖梁之间构成一个三角形;
62.旋转承台具体包括:两组行车竖梁、四个连接横梁、两个行车坡板、坡板拉线和踏板格栅;
63.两组行车竖梁分设在四个连接横梁的两端;四个连接横梁将两组行车竖梁连接为一体;每组行车竖梁包括两个行车竖梁单元;靠近伸缩装置的两个连接横梁的底部设置有
横梁定向脚轮;远离伸缩装置的两个连接横梁的底部设置有横梁万向脚轮。
64.本实施例中,旋转承台还包括:限位阻车装置;限位阻车装置安装行车竖梁上并邻近行车竖梁的一端。
65.进一步地,限位阻车装置包括:限位阻车器和设置在限位阻车器上的阻车器动作电磁铁。
66.可选地,承重竖梁上还可以安装有滑轮装置;行车竖梁与承重竖梁上对应的位置上还可以安装有运输吊环。
67.本实施例中,本实施例中提供的受限停车辅助系统,还可以包括:测距传感器和热能传感器;
68.控制器还与测距传感器和热能传感器分别相连;
69.测距传感器设置在旋转承台的周边;
70.热能传感器设置在旋转承台的周边。
71.进一步地,控制器包括:控制器防水外壳、控制板、dc
‑
dc降压稳压板、多路继电器和供电电路;
72.供电电路在控制器内分成两路,一路与dc
‑
dc降压稳压板相连、然后依次经过控制板和多路继电器控制端与热能传感器和测距传感器分别相连;另一路经过多路继电器动力端与旋转电机和推杆电机分别相连。
73.优选地,本实施例中提供的受限停车辅助系统,还可以包括:遥控器;遥控器上设置有发出推出指令和发出回退指令的按钮。
74.进一步地,本实施例中提供的受限停车辅助系统,还可以包括:车库;旋转承台、伸缩底盘和控制器位于车库中;遥控器上还设置有开启和关闭车库车门的按钮。
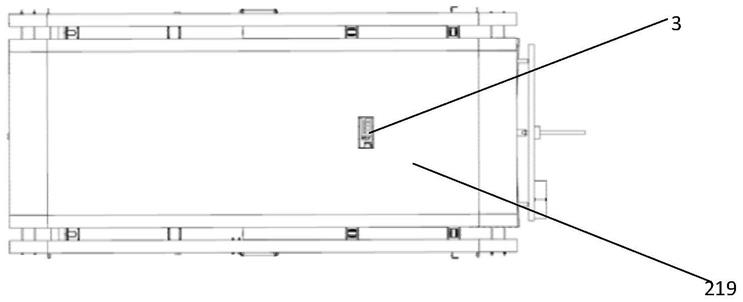
75.更加具体地,本实施例提供了一种受限停车辅助系统,如图1
‑
图5所示,包括:伸缩底盘1、旋转承台2和控制器3;
76.伸缩装置包括:剪叉杆111、连接轴销112、剪叉杆支架113和定位限位座 114;
77.剪叉杆111通过连接轴销112连接为一体;剪叉杆111通过剪叉杆支架113 安装在定位限位座114上;
78.剪叉杆111的底部两侧的每侧还设置有一组剪叉杆脚轮,分别为第一组剪叉杆脚轮1110和第二组剪叉杆脚轮;优选地,剪叉杆脚轮为定向脚轮。
79.承载装置包括:第一承重竖梁121和第二承重竖梁122、第一承重横梁123 和第二承重横梁124、第一承重斜梁125、第二承重斜梁126、第三承重斜梁127 和第四承重斜梁128,一个推杆支架梁129;推杆支架梁129的两端分别连接到第一承重横梁123和第二承重横梁上124上;第一承重竖梁121底部还分别设置有第一承重脚轮1210;第二承重竖梁122的底部还设置有第二承重脚轮。
80.优选地,第一承重脚轮1210和第二承重脚轮为定向脚轮。
81.第一承重竖梁121、第一承重横梁123、第二承重竖梁122和第二承重横梁 124之间首尾相连构成一个四边形;每个承重斜梁的一端与一个承重横梁连接;另一端与一个承重竖梁连接;每个承重斜梁与其连接的承重横梁和承重竖梁之间构成一个三角形;旋转电机和推杆电机安装在推杆支架梁129上;推杆电机通过推杆支架梁129与伸缩装置连接。
82.优选地,推杆电机为液压推杆电机;旋转电机为直流旋转电机。
83.第一承重竖梁121和第二承重竖梁122的外边缘上还安装有滑轮装置130;滑轮装置130包括:滑轮和滑轮支架。
84.旋转承台具体包括:第一组行车竖梁211和第二组行车竖梁212、第一连接横梁213、第二连接横梁214、第三连接横梁215和第四连接横梁216、第一行车坡板217和第二行车坡板218、坡板拉线和踏板格栅219;
85.两组行车竖梁分设在四个连接横梁的两端;四个连接横梁将两组行车竖梁连接为一体;每组行车竖梁包括两个行车竖梁单元;靠近伸缩装置的两个连接横梁的底部两侧设置有横梁定向脚轮220;远离伸缩装置的两个连接横梁的底部两侧设置有横梁万向脚轮221。
86.第三连接横梁215和推杆支架梁129通过旋转螺栓连接;
87.本实施例中,旋转承台上还包括:限位阻车装置222;限位阻车装置222安装在第一组行车竖梁211和第二组行车竖梁上212并邻近第一组行车竖梁211 和第二组行车竖梁212上的一端。
88.进一步地,限位阻车装置222包括:限位阻车器和设置在限位阻车器上的阻车器动作电磁铁。
89.第一行车竖梁211和第二组行车竖梁上212上的分别与第一承重竖梁和第二承重竖梁对应的位置上还安装有运输吊环223。
90.本实施例中提供的受限停车辅助系统,还可以包括:测距传感器321和热能传感器322;
91.控制器3还与多个测距传感器321和多个热能传感器322分别相连;
92.优选地,测距传感器321为超声波测距传感器;热能传感器322为人体热能传感器。
93.如图5所示,测距传感器321分别设置在第一行车坡板踏板的外边缘处、第一组行车竖梁211与第二连接横梁214的外侧连接处、第二组行车竖梁212 与第二连接横梁214的外侧连接处;
94.热能传感器322分别设置在第一组行车竖梁211与第四连接横梁216的外侧连接处、第二组行车竖梁212与第四连接横梁216外侧连接处。
95.进一步地,控制器3包括:控制器防水外壳、控制板、dc
‑
dc降压稳压板、多路继电器和供电电路;
96.本实施例中,供电电路可以包括蓄电池、太阳能充电板和交流变直流电源模块。
97.本实施例中,供电电路在控制器内分成两路,一路与dc
‑
dc降压稳压板相连、然后依次经过控制板与多路继电器控制端和热能传感器322和测距传感器 321分别相连。另一路经过多路继电器动力端与旋转电机和推杆电机分别相连,用于供电。
98.优选地,控制板为arduino板。
99.本实施例中提供的受限停车辅助系统,还包括:遥控器;遥控器上设置发出推出指令和发出回退指令的按钮。
100.当受限停车辅助系统收到遥控器推出指令后,启动热能传感器322和测距传感器321工作,当热能传感器322监测到伸缩底盘1和旋转承台2运动轨迹范围内有人或动物时或测距传感器监测到伸缩底盘1和旋转承台2运动轨迹 50cm范围内有障碍物时,启动步骤1和步骤2暂停及报警程序,直至预警解除,继续执行步骤1和步骤2。
101.步骤1:控制推杆电机工作,直至将伸缩底盘1完全推出;
102.步骤2:控制旋转电机工作,直至将旋转承台2完全推出。
103.当受限停车辅助系统收到遥控器的回退指令后,启动热能传感器322和测距传感器321工作,当热能传感器322监测到伸缩底盘1和旋转承台2运动轨迹范围内有人或动物时或测距传感器321监测到伸缩底盘1和旋转承台2运动轨迹50cm范围内有障碍物时,启动步骤3和步骤4暂停及报警程序,直至预警解除,继续执行步骤3和步骤4。
104.步骤3、控制旋转电机工作,直至将旋转承台2完全收回。
105.步骤4:控制推杆电机工作,直至将伸缩底盘1完全收回。
106.进一步地,本实施例中提供的受限停车辅助系统,还可以包括车库;旋转承台2、伸缩底盘1和控制器3位于车库中;遥控器上还设置有开启和关闭车库车门的按钮。
107.相应地,例如,遥控器的abcd四个按钮分别可实现4种工作指令,a按钮为车库门单独开启,b按钮为车库门单独关闭,c按钮为车库门开启后受限停车辅助系统推出指令,d按钮为受限停车辅助系统回退后车库门关闭。
108.本实用新型提供的受限停车辅助系统包括旋转承台、伸缩底盘、控制器3 个主要集成部件。其中旋转承台可以是使用槽钢纵横衔接搭建出能够承重3吨以内的汽车停放的旋转平台,用于拖车入位或送车出位。控制板可以通过控制旋转电机来控制旋转承台的旋转角度,例如,旋转承台的旋转角度为每30秒水平旋转90度。伸缩底盘是使用槽钢组装焊接成一个框架平台,用于提供旋转承台旋转时盘间轮走位和安装液压推杆电机、直流转向旋转电机等。伸缩底盘的盘筋可以是由14根矩形管连接成的剪叉行程放大机构,将液压推杆的0.4米行程放大到5.6米,用于将旋转承台和伸缩底盘送出或拖回车位。控制器包括有控制板、稳压器、多路继电器、无线电接收器等;控制器与热能传感器、测距传感器、屏蔽数据线等组成的智能控制电气系统,用于控制整体设备运行以及运行过程中的安全监测。使得本实用新型提供的受限停车辅助系统,能够在保证安全的基础上,实现窄车库、窄车位等受限空间的精准泊车入位。
109.以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何属于本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应该以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1