一种自动精确注浆设备的制作方法
1.本实用新型涉及建土木工程仪器技术领域,具体涉及一种可用于需要进行精确注浆场合的自动精确注浆设备。
背景技术:
2.注浆机是一种将浆体注入指定空腔位置的工程机械设备,主要用于防水灌浆、工艺品喷涂等喷涂工程,以及堵漏工程,包括伸缩缝漏水、沉降缝漏水、地道漏水等取水堵漏工程和地坪空鼓、裂痕加固、桥梁等别的补强加固工程。注浆机主要种类为双液注浆机、挤压式注浆机、螺旋式注浆机和活塞式注浆机,不同种类注浆机结构和组成也不相同,在不同的应用场景中各具优势。
3.目前,注浆机仍以人工经验操作为主,操作人员将浆体放入仪器配套的容器中,再一步一步进行注浆流程。在此过程中,浆体的释放与关闭完全依赖人工经验操作。由于实际现场操作的复杂性与操作人员自身问题,无法高效、精确的完成注浆工作。随着科学技术的不断发展,各类仪器设备的自动化程度越来越高,智能、可靠的控制系统为传统依赖人工经验的设备提供了更高效的解决方案。综上所述,业内亟需一种能够实现自动精确注浆的设备。
技术实现要素:
4.(一)解决的技术问题
5.本实用新型的目的在于提供一种自动精确注浆设备,以解决上述背景技术中提出的由于实际现场操作的复杂性与操作人员自身问题,无法高效、精确的完成注浆工作的问题。
6.(二)技术方案
7.为实现上述目的,本实用新型提供如下技术方案:一种自动精确注浆设备,它包含液体容器、设备外壳、交互显示组件、运动导轨组件、运动活塞组件、注浆出入口和控制系统,所述设备外壳的上端并列设置有两个液体容器,所述设备外壳的内部安装有相互连接的运动导轨组件和运动活塞组件,所述运动活塞组件通过注浆出入口与液体容器连接,所述设备外壳的前侧安装有交互显示组件,所述交互显示组件、运动导轨组件和注浆出入口均与设备外壳内部的控制系统电性连接。
8.作为本实用新型的进一步改进,所述的交互显示组件为电容触摸屏,电容触摸屏外部设置有可开合遮罩。
9.作为本实用新型的进一步改进,所述的运动导轨组件包含运动电机、编码器、复位传感器、滑台、限位划片、丝杆、终点限位传感器和滑轨,运动电机的一端与编码器连接,运动电机的另一端与丝杆紧密连接,滑台底部通过螺纹结构与丝杆连接,且滑台两侧与滑轨连接;滑台上设有限位划片,滑轨的起点与终点位置分别设有复位传感器和终点限位传感器,限位划片上设有与复位传感器和终点限位传感器相配合的长条形凸块。
10.作为本实用新型的进一步改进,所述的运动活塞组件包含活塞推杆、活塞推杆支撑件、液体腔室、橡胶固定片、橡胶片、液体腔室入口一、液体腔室入口二和液体腔室出口,活塞推杆的一端固定有若干片橡胶固定片和橡胶片组成活塞,活塞同轴设置在液体腔室内,活塞推杆的另一端穿过活塞推杆支撑件与滑台的上端连接,液体腔室的端部设置有液体腔室入口一、液体腔室入口二和液体腔室出口。
11.作为本实用新型的进一步改进,所述的注浆出入口包含入口电磁阀一、入口电磁阀二、出口电磁阀、流量传感器和液体输出接口,入口电磁阀一的一端与液体腔室入口一连接,入口电磁阀一的另一端通过软管与一个液体容器底端连接;入口电磁阀二的一端与液体腔室入口二连接,入口电磁阀二的另一端通过软管与另一个液体容器底端连接;出口电磁阀的一端与液体腔室出口连接,出口电磁阀的另一端与流量传感器连接,流量传感器与液体输出接口连接,且液体输出接口与设备外壳固定,并连接软管。
12.作为本实用新型的进一步改进,所述的控制系统包含主控制板、步进电机驱动器、存储单元、电源单元和通信单元,步进电机驱动器和存储单元均与主控制板电性连接,主控制板分别与电源单元和通信单元电性连接,主控制板分别与交互显示组件、运动电机、编码器、复位传感器、终点限位传感器、入口电磁阀一、入口电磁阀二、出口电磁阀和流量传感器电性连接。
13.作为本实用新型的进一步改进,所述的液体容器的上端设置有用于注入液体的入口,底部设置有作为液体出口的开口,且液体容器内壁设置有刻度线层。
14.作为本实用新型的进一步改进,所述的设备外壳底部安装有仪器支撑脚座,设备外壳的前侧设置有透明面板。
15.(三)有益效果
16.与现有技术相比,采用上述技术方案后,本实用新型有益效果为:
17.1、本实用新型通过闭环电机控制系统实现连接在导轨上的活塞精确运动设定距离,完成浆体的吸取和释放操作;
18.2、本实用新型通过流量传感器和电磁阀配合实现浆体流动的控制来对容器内进行自动精确注浆,完成注浆后,可自动对液体腔室和其出口处进行清洗,避免浆体固化影响注浆设备工作;
19.3、本实用新型通过数字控制系统精确控制浆体注入量,且可将注浆数据进行存储与分析,保证每次注浆的顺利进行。
附图说明
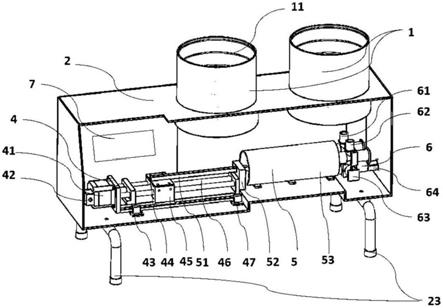
20.图1是本实用新型所提供的实施例的外部结构示意图;
21.图2是本实用新型所提供的实施例的内部结构示意图;
22.图3是本实用新型所提供的实施例中运动导轨组件的结构示意图;
23.图4是本实用新型所提供的实施例中运动活塞组件的结构示意图;
24.图5是本实用新型所提供的实施例中注浆出入口的结构示意图;
25.附图标记说明:
26.1、液体容器;2、设备外壳;3、交互显示组件;4、运动导轨组件;5、运动活塞组件;6、注浆出入口;7、控制系统;11、刻度线层;21、可开合遮罩;22、透明面板;23、仪器支撑脚座;
41、运动电机、42、编码器;43、复位传感器;44、滑台;45、限位划片;46、丝杆;47、终点限位传感器; 48、滑轨;51、活塞推杆;52、活塞推杆支撑件;53、液体腔室;54、橡胶固定片;55、橡胶片;56、液体腔室入口一;57、液体腔室入口二;58、液体腔室出口;61、入口电磁阀一;62、入口电磁阀二;63、出口电磁阀;64、流量传感器;65、液体输出接口;71、主控制板;72、步进电机驱动器;73、存储单元;74、电源单元;75、通信单元。
具体实施方式
27.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
28.请参阅图1
‑
图5,本实用新型提供的一种实施例:一种自动精确注浆设备,它包含液体容器1、设备外壳2、交互显示组件3、运动导轨组件4、运动活塞组件5、注浆出入口6和控制系统7,其中,
29.液体容器1包括两个容积为5l的液体容器,分别存放浆体与水,固定在设备外壳2的顶部,可进行单独更换和单独清洗,液体容器1下端有外径为 20mm的圆形开口,液体容器1为上宽下窄的结构,其内壁设置有刻度线层11,刻度线层11由上至下分为5条刻度线,分别对应1—5l位置,最顶端刻度线为5l;
30.设备外壳2底部安装有仪器支撑脚座23,设备外壳2的前侧设置有透明面板22和交互显示组件3,交互显示组件3为七寸电容液晶触摸屏,电容液晶触摸屏外部设置有可开合遮罩21,减少外部环境对电容液晶触摸屏的影响;
31.设备外壳2的内部安装有相互连接的运动导轨组件4和运动活塞组件5:
32.运动导轨组件4包含运动电机41、编码器42、复位传感器43、滑台44、限位划片45、丝杆46、终点限位传感器47和滑轨48,运动电机41为57步进电机,编码器42为增量式编码器,复位传感器43和终点限位传感器47均为对射式光电传感器,运动电机41的一端与编码器42连接,运动电机41的另一端与丝杆46紧密连接,滑台44底部通过螺纹结构与丝杆46连接,且滑台44两侧与滑轨48连接;滑台44上设有限位划片45,滑轨48的起点与终点位置分别设有复位传感器43和终点限位传感器47,限位划片45上设有与复位传感器43和终点限位传感器47相配合的长条形凸块;
33.运动活塞组件5包含活塞推杆51、活塞推杆支撑件52、液体腔室53、橡胶固定片54、橡胶片55、液体腔室入口一56、液体腔室入口二57和液体腔室出口58,活塞推杆51的一端固定有三片橡胶固定片54和两片橡胶片55组成活塞,每片橡胶片55的两侧壁均与橡胶固定片54固定连接,活塞同轴设置在液体腔室53内进行运动,活塞推杆51的另一端穿过活塞推杆支撑件52 与滑台44的上端连接,液体腔室53的端部设置有直径为20mm的液体腔室入口一56、液体腔室入口二57和液体腔室出口58,且液体腔室入口一56、液体腔室入口二57和液体腔室出口58均为螺纹接口;
34.编码器42与运动电机41结合,通过编码器42反馈数据计算与滑台44 连接的活塞推杆51移动距离。限位划片45与复位传感器43和终点限位传感器47的配合,可对滑台44上活塞推杆51连接的活塞进行复位和限制其最大运动距离,以保证活塞运动精确和安全;
35.运动活塞组件5通过注浆出入口6与液体容器1连接,注浆出入口6包含入口电磁阀一61、入口电磁阀二62、出口电磁阀63、流量传感器64和液体输出接口65,入口电磁阀一61的一端与液体腔室入口一56通过螺纹连接,入口电磁阀一61的另一端通过软管与盛放浆体的液体容器1底端连接,通过入口电磁阀一61控制浆体进入液体腔室53的通路;入口电磁阀二62的一端与液体腔室入口二57通过螺纹连接,入口电磁阀二62的另一端通过软管与盛放水的液体容器1底端连接,通过入口电磁阀二62控制水进入液体腔室53 的通路;出口电磁阀63的一端与液体腔室出口58通过螺纹连接,出口电磁阀63的另一端与流量传感器64通过螺纹连接,流量传感器64与液体输出接口65连接,且液体输出接口65与设备外壳2固定,液体输出接口65通过软管连接,通过出口电磁阀63控制浆体与水的排出通路,同时由流量传感器64 实时计算排出的液体体积,流量传感器64可以精确采集浆体注射体积,并将数据反馈至控制系统7,通过与电磁阀的配合,自动进行定量的注浆,保证单次注浆体积精确、可靠;
36.交互显示组件3、运动导轨组件4和注浆出入口6均与设备外壳2内部的控制系统7电性连接,控制系统7包含主控制板71、步进电机驱动器72、存储单元73、电源单元74和通信单元75,其中主控制板71的主控芯片为 stm32f103c8t6,电源输入为5v,通信方式为spi。步进电机驱动器72和存储单元73均与主控制板71电性连接,主控制板71分别与电源单元74和通信单元75电性连接,主控制板71分别与交互显示组件3、运动电机41、编码器42、复位传感器43、终点限位传感器47、入口电磁阀一61、入口电磁阀二62、出口电磁阀63和流量传感器64电性连接。控制系统7的输入信号包括流量传感器64的数据、交互显示组件3的输入部分、复位传感器43和终点限位传感器47的信号、编码器42的位置数据等,输出信号包括电磁阀控制信号、交互显示组件3的显示部分、运动电机41的控制信号等。
37.本实施例的工作流程为:
38.(a)在注浆开始之前,用户将两个液体容器1放置在设备外壳2上的适配工位内,根据液体容器1的刻度线分别加入5l的浆体与水,之后设备上电,模块进行自检与初始化;
39.(b)完成之后,打开可开合遮罩21,在电容液晶触摸屏中输入液体容器 1中浆体与水的体积参数,并设置单次或连续注入浆体与水的体积,以及浆体和水的注液与出液速度,输入完成之后,关闭可开合遮罩21;
40.(c)将液体输出接口65上连接的管路连接需要注浆的容器,打开可开合遮罩21在电容液晶触摸屏中点击开始注浆按键;
41.(d)运动导轨组件4和运动活塞组件5,控制系统7打开入口电磁阀一 61将设定体积的浆体吸入液体腔室53,浆体吸取完成后,控制系统7关闭入口电磁阀一61,打开出口电磁阀63,并通过运动导轨组件4推动活塞推杆51 将浆体通过管路注入容器中,控制系统7通过流量传感器64实时计算排出浆体的体积,一旦排出体积达到设定体积,立即关闭出口电磁阀63,控制系统 7将此次注浆的参数存储在存储单元73中,并计算液体容器1与液体腔室53 剩余液体体积;
42.(e)完成所有注浆操作之后,使用液体容器1中的水对液体腔室53与注浆出入口6用水进行清洗,过程与注浆操作类似,不同的是从液体腔室53 中排出水时,活塞推杆51运动速度较快,达到使水快速排出的目的,实现清洗操作,全程由控制系统7记录操作步骤与数据;
43.(f)清洗完成之后,关闭设备电源。
44.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。
45.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1