一种分体式汽车对中举升搬运机器人的制作方法
1.本发明属于汽车搬运设备技术领域,特别涉及一种分体式汽车对中举升搬运机器人。
背景技术:
2.随着城市车辆的的快速增长,立体停车将成为解决停车难的重要方式。在大型仓储类智能化的机械式停车设备中,就需要有高智能化运行的汽车搬运器。目前普遍采用的汽车智能搬运器有载车板型、梳齿型型和抱夹型等。
3.载车板型的搬运器运行简单可靠,不足之处在于要空载车板需要二次取板后才能完成存、取车工作,生产成本高,且工作效率较低。
4.梳齿型搬运器主要是利用车位和搬运器的梳齿上下交错完成车辆的搬运过程,其工作速度快、效率较高,搬运器的生产精度高,部分搬运器厚度较厚。
5.抱夹型搬运器早已问世多年,它能够直接钻入车辆下方,利用相向转动的夹持臂将车辆轮胎抱起,然后将车辆运送到停车位,具有结构小巧、工作效率较高、速度快等优点。
6.众所周知,在抱夹型搬运器夹抱汽车轮胎时,轮胎的受力过程很复杂,夹持臂相向旋转慢慢接近轮胎,先接近轮胎的内侧,此时夹持臂的夹持面与轮胎外圆处于有角度接触,对车辆轮胎产生极大的挤压力,尽管大多数夹持臂上有减少轮胎摩擦的辊轮,但是从长期使用考虑,还是会对待存车辆轮胎产生损伤,且现有搬运器不具备抬升车辆的功能。
7.由于仓储类的智能化机械式停车库的停车位较小,且停车人员停放车辆时,无法精确做到车辆完全对正载车位,因此需要对被停车辆进行机械对中校正,使得搬运器能够较为平衡的搬运被停车辆,并在搬运过程中,避免将被停车辆划伤或者发生碰撞。一般车辆对中的机构均设在车库进口的载车位上,往往会对司机停车时产生干扰,且制作较复杂,也增加了智能化的控制难度和控制时间。
技术实现要素:
8.本发明的目的是解决背景技术中提到的技术问题,提供了一种分体式汽车对中举升搬运机器人,具有停放车位的结构简单,提高了存取车效率及可靠性的效果。
9.本发明提供的技术方案为:
10.一种分体式汽车对中举升搬运机器人,包括:用于举升车辆前轮部分的前车体和举升车辆后轮部分的后车体,所述前车体与后车体均为内外双层架体结构,所述前车体和后车体分别包括相互独立的行走传动机构,所述行走传动机构设置在对应车体的外框架上,所述前车体与后车体上均设置有功能单元;
11.所述功能单元包括:两组夹抱摆臂机构、车辆对中机构和升降传动机构,两组所述夹抱摆臂机构对称且转动安装在对应车体框架上,所述车辆对中机构设置在两组夹抱摆臂机构的中线上,所述升降传动机构设置在对应车体的内框架上;
12.所述夹抱摆臂机构,包括:夹抱摆臂,所述夹抱摆臂的旋转端均设有左旋涡轮蜗杆
传动副和右旋涡轮蜗杆传动副,夹抱摆臂的旋转端均设有涡轮蜗杆传动装置,每相邻的两组涡轮蜗杆传动旋转方向相反,前后两组旋蜗杆分别连接两台齿轮减速机及电机,从而使前后两组摆臂能单独同步或异步展开。所述夹抱摆臂上设有限位开关,所述限位开关在摆臂展开时可触碰车轮产生控制所述电机的控制信号,从而使所述夹抱摆臂可根据车辆不同轴距进行后胎的精确定位;
13.所述车辆对中机构,包括:第一减速机电机,丝杠的一端与减速机电机的轴固定连接,正向t型扣螺母和反向t型扣螺母分别配合安装在所述丝杠上,对中滑块分别配合安装在对应的t型扣螺母上,车辆对中机构位于两组夹抱摆臂之间,对中机构两端可同步向垂直车体边缘方向做伸出与收回,对中机构伸出后两端的最大距离为1350—1500毫米。
14.所述升降传动机构,包括:第二减速电机和升降主轴,所述升降主轴与第二减速机的轴固定连接,两个主齿轮分别固定安装在升降主轴的两端,两个传动齿轮分别转动安装在对应车体的内框架上,所述主齿轮与对应传动齿轮啮合,升降齿条固定连接在对应车体的外框架上,所述主齿轮与传动齿轮分别与相邻的升降齿条啮合,升降传动机构位于内框架中间,升降传动机构可带动内框架沿上下方向做举升和下降动作。
15.优选的是,所述夹抱摆臂展开后相互之间的距离小于车轮直径。
16.优选的是,所述对中机构伸出后两端的最大距离为1350—1500毫米。
17.优选的是,所述夹抱摆臂上设有限位开关。
18.优选的是,所述限位开关与plc控制端电连接控制、且可与车轮间接接触。
19.优选的是,所述夹抱摆臂机构上相邻的两组涡轮蜗杆传动副旋向均相反、且前臂或后臂同时打开或关闭。
20.优选的是,所述前车体和后车体前后均设有缓冲隔离垫。
21.优选的是,所述夹抱摆臂上不同组的左、右蜗轮蜗杆的传动副分别与对应的齿轮减速电机的轴固定连接。
22.本发明的有益效果体现在以下方面:
23.1、由于进出口车位和车库车位前轮胎位置固定,搬运机器人通过编码器或光电装置寻址前胎,当搬运机器人工作时,前后车体同时到达被停放车辆的前轮胎位置后停车运行,剩余单体运动到被停放车辆后轮胎位置,在进入被停放车辆之前,打开一组摆臂完全张开,成“一”字形,随着“一”字形摆臂碰触到汽车后轮,“一”字形摆臂上的限位开关触发后车体行走机构电机制动和“一”字形摆臂电机启动使其闭合,此时前车体和后车体分别在被停车辆的前轮胎和后轮胎正下方,至此,通过前车体寻位和后车体“机械寻址”完成对不同轴距被停车辆的精确寻址,有益于提高存取车效率。
24.2、本发明通过在夹抱摆臂中间设置车辆对中机构,第一减速电机通过丝杠同时带动两端的正向t型扣螺母和反向t型扣螺母相互靠近或远离,进而分别带动对应的对中滑块做同步的进行相向或相反运动,从而实现车辆的对中功能,对中功能中设置有压力传感器,有益于防止搬运过程中车辆划伤或碰伤,有益于提高搬运过程的稳定性。
附图说明
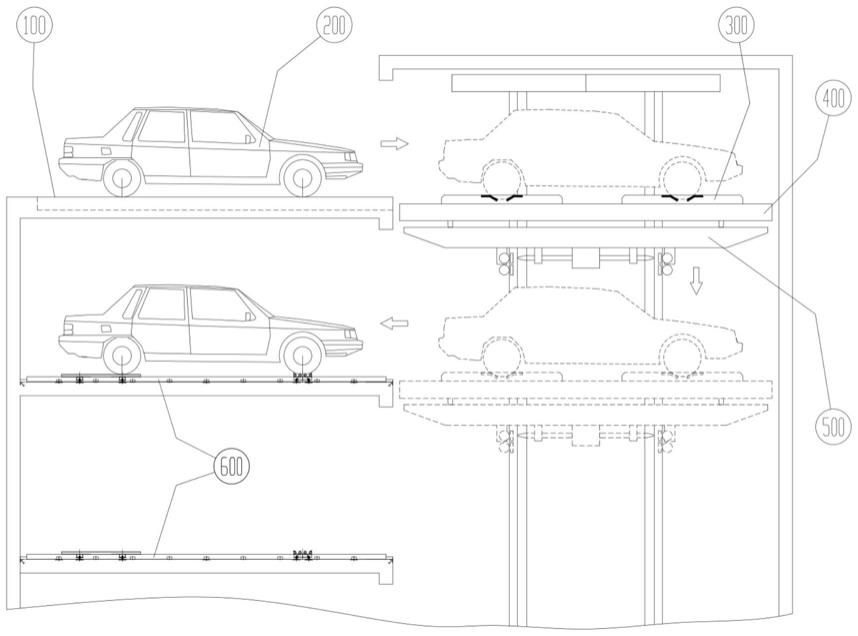
25.图1为多层停车库的结构示意图;
26.图2为本发明的侧视图;
27.图3为本发明的俯视图;
28.图4为前车体俯视图;
29.图5为前车体的正视结构剖视图;
30.图6为夹抱摆臂的结构示意图;
31.图7为待停车辆进入进出口停车位示意图;
32.图8为车辆在停车位时结构示意图;
33.图9为升降传动机构提升车辆结构示意图。
34.图中:10行走传动机构,100托板,20外框架,200车辆,300分体式汽车对中举升搬运机器人,301前车体,302后车体,30内框架,400横移台车,401限位开关,41左旋涡轮蜗杆传动副,42右旋涡轮蜗杆传动副,43齿轮减速机电机,4夹抱摆臂,500升降机,51第一减速电机,52丝杠,53正向t型扣螺母,54反向t型扣螺母,55对中滑块,5车辆对中机构,600停车位,61第二减速电机,62升降主轴,63主齿轮,64传动齿轮,65升降齿条,6升降传动机构,7缓冲隔离垫。
具体实施方式
35.下面结合附图对本发明做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。
36.如图1—3所示,本发明提供了一种分体式汽车对中举升搬运机器人,包括:用于举升车辆前轮部分的前车体和举升车辆后轮部分的后车体,所述前车体与后车体均为内外双层架体结构,所述前车体和后车体分别包括相互独立的行走传动机构,所述行走传动机构设置在对应车体的外框架上,所述前车体与后车体上均设置有功能单元;
37.所述功能单元包括:两组夹抱摆臂机构、车辆对中机构和升降传动机构,两组所述夹抱摆臂机构对称且活动安装在对应车体框架上,所述车辆对中机构设置在两组夹抱摆臂机构的中线上,所述升降传动机构设置在对应车体的内框架上;
38.所述夹抱摆臂机构,包括:夹抱摆臂,所述夹抱摆臂的旋转端均设有左旋涡轮蜗杆传动副和右旋涡轮蜗杆传动副,夹抱摆臂的旋转端均设有涡轮蜗杆传动装置,每相邻的两组涡轮蜗杆传动旋转方向相反,前后两组旋蜗杆分别连接两台齿轮减速机及电机,从而使前后两组摆臂能单独同步或异步展开。所述夹抱摆臂上设有限位开关,所述限位开关在摆臂展开时可触碰车轮产生控制所述电机的控制信号,从而使所述夹抱摆臂可根据车辆轴距进行精确定位后胎;
39.所述车辆对中机构,包括:第一减速机电机,丝杠的一端与减速机电机的轴固定连接,正向t型扣螺母和反向t型扣螺母分别配合安装在所述丝杠上,对中滑块分别配合安装在对应的t型扣螺母上,车辆对中机构位于两组夹抱摆臂之间,对中机构两端可同步向垂直车体边缘方向做伸出与收回,对中机构伸出后两端的最大距离为1350—1500毫米。
40.所述升降传动机构,包括:第二减速电机和升降主轴,所述升降主轴与第二减速机的轴固定连接,两个主齿轮分别固定安装在升降主轴的两端,两个传动齿轮分别转动安装在对应车体的内框架上,所述主齿轮与对应传动齿轮啮合,升降齿条固定连接在对应车体的外框架上,所述主齿轮与传动齿轮分别与相邻的升降齿条啮合,升降传动机构位于内框架中间,升降传动机构可带动内框架沿上下方向做举升和下降动作。如图1所示:多层停车
库包括多个停车层,每个停车层设有停车位600,多层停车库设有升降机500和横移台车400,用于将被停车辆200送入不同停车层的停车位600。本实施案例的分体式汽车对中举升搬运机器人300即是用于将被停车辆200从进出口停车位100搬运到升降机500或横移台车400上,待升降机500到达相应的停车层,横移台车400可以与不同停车层的停车位600对齐,此时,分体式汽车对中举升搬运机器人300将被停车辆200运送到不同停车层的停车位600,也可以反向搬运取车。
41.图2为图1中的分体式汽车对中举升搬运机器人侧视图,图3为图1中的分体式汽车对中举升搬运机器人俯视图,图4为分体式汽车对中举升搬运机器人的其中一个车体的正视结构局部剖视图,图5为分体式汽车对中举升搬运机器人的其中一个车体的俯视结构图。如图2和图3所示:该分体式汽车对中举升搬运机器人300包括用于举升车辆前轮部分的前车体301和举升车辆后轮部分的后车体302。
42.如图4和图5所示:前车体301和后车体302分别包括相互独立的行走传动机构10,行走传动机构10设置在车体的外框架20上。
43.前车体301和后车体302都包括自身独立运行的两组夹抱摆臂4,夹抱摆臂4可收放在车体两侧的边缘以内,并可旋转打开至垂直车体边缘,每组夹抱摆臂展开后相互之间的距离小于车轮直径。
44.夹抱摆臂4的旋转端均设有左旋涡轮蜗杆传动副41和右旋涡轮蜗杆传动副42,每相邻的两组涡轮蜗杆传动副旋向均相反,前后两组左旋蜗杆411和右旋蜗杆421分别连接两台齿轮减速机及电机43,从而使前后两组摆臂4能单独同步展开。
45.前车体301和后车体302都包括自身独立运行的车辆对中机构5,车辆对中机构5位于两组夹抱摆臂4之间,对中机构5两端可同步向垂直车体边缘方向做伸出与收回动作,车辆对中机构5伸出后两端的最大距离大于常规家用汽车的车轮内距。
46.车辆对中机构5是由一台减速机电机51带动丝杠52,丝杆52两端分别带动t型扣螺母53和反向t型扣螺母54,使t型扣螺母53和反向t型扣螺母54分别带动对中滑块55做同步的进行相向或相反运动,从而实现车辆的对中功能。
47.前车体301和后车体302都包括自身独立运行的升降传动机构6,升降传动机构6位于内框架30中间,升降传动机构6可带动内框架30沿外框架20上下方向做举升和下降动作。
48.升降传动机构6是由一台减速机电机61带动升降主轴62,主轴62两端带动升降主齿轮63,传动齿轮64固定在内框架3上,升降齿条65固定连接于外框架20上,升降主齿轮63与传动齿轮64相啮合,升降主齿轮63和传动齿轮64分别与相临的升降齿条65相啮合。
49.前车体和后车体前后均设有缓冲隔离垫7。缓冲隔离垫有助于两个车体之间的缓冲碰撞,以及与进出口车位限位器之间的缓冲碰撞和车辆底盘防撞检测装置。
50.图6为夹抱摆臂结构图。如图6所示:夹抱摆臂4上设有限位开关401,限位开关与plc控制端电连接、且可与车轮间接接触,限位开关401在夹抱摆臂4展开时可触碰车轮产生控制行走传动机构10电机的控制信号,plc端的连接方式以及plc控制端的控制原理,属于本领域技术人员所熟知的内容,所以在此不做过多赘述,从而使后车体302运动可根据车辆轴距进行精确定位。
51.如图4以下说明使用该分体式汽车对中举升搬运机器人搬运车辆的过程:待停车辆200缓慢驶入进出车口车位c,进出车口车位c设有前轮阻车器z,当待停车辆200前轮触碰
到阻车器z,迫使待停车辆200停车熄火,司机下车离开进出口车位c。随后,前轮阻车器z降落,分体式汽车对中举升搬运机器人的前车体301和后车体302驶入进口车位c,由于进出口车位c和车库车位事先经过前车体301的寻址编码器和光电装置定位(汽车前车轮的位置记录),当搬运机器人工作时,前后车体301、302可直接到达待停车辆200的前轮胎位置,301停止工作,后车体302的打开夹抱前或后摆臂4完全张开,成“一”字形,随着“一”字形夹抱摆臂4碰触到汽车后轮,“一”字形夹抱摆臂4上的限位开关触发后车体302上的行走传动机构10电机制动,同时,控制“一”字形夹抱摆臂4的齿轮减速机及电机43启动使其闭合。此时前车体和后车体分别在被停车辆的前轮胎和后轮胎正下方,至此,通过前车体301“寻址装置”和后车体302“机械寻址”完成对不同轴距被停车辆的搬运准备,根据上述过程,可适应不同轴距的汽车和电动车完成搬运动作。前车体301和后车体302上的车辆对中机构5同时运行,当两侧对中模块55上的限位开关401同时触发后,减速机电机51断电,此时车辆对中完成,随即第一减速机电机51反转将车辆对中机构5回收;
52.如图7—8所示,前车体301和后车体302上的齿轮减速机及电机43同时运行,带动左旋涡轮蜗杆传动副41和右旋涡轮蜗杆传动副42使所有夹抱摆臂4旋转打开直到限位开关401同时触发后停止。此时,所有夹抱摆臂4均以紧贴待停车辆200的轮胎;
53.如图9所示,前车体301和后车体302上的升降减速机电机61同时运行,通过各自的升降主轴62带动升降主齿轮63和传动齿轮64沿着升降齿条65做向上运动,此时,由于夹抱摆臂4的左旋涡轮蜗杆传动副41和右旋涡轮蜗杆传动副42带有自锁功能以及各自的齿轮减速机及电机43带有刹车,所以待停车辆200可以被提升起来,前车体301和后车体302上的行走传动机构10同时运动,将待停车辆200运至停车位。经过上述过程,完成车辆搬运,相对于现有技术而言,有益于提高存取车效率,并有益于提高搬运过程中的稳定性,防止车辆划伤磕碰。
54.尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用。它完全可以被适用于各种适合本发明的领域。对于熟悉本领域的人员而言,可容易地实现另外的修改。因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1