一种高防护型高空作业车以及工作方法与流程
1.本发明涉及一种高空作业设备,具体涉及一种能够快速地完成对于操作平台四周的护栏进行闭合和打开的装置和方法。
背景技术:
2.在工业生产、建筑施工等技术领域内,经常需要在高处进行临时的施工作业,而这种临时的施工作业则一般会用到高空作业车,高空作业车在现有技术中的类型多样,其基本原理例如采用了气缸、液压缸的方式逐渐地把操作平台从相对低位而上升到较高的位置以完成临时的高空作业。
3.为了提高高空作业的安全性,一般会在这种操作平台的四周位置安装设置有护栏结构,通过这种护栏结构就能够对于高空作业的人员进行很好的作业保护,避免其在高空中的意外摔落的危险。而这种传统的护栏结构在实际使用的时候也存在一定的问题,就是其入口通常较小,只有一个小门供人员的进出和货物的装运,然而在一些情况下需要把操作平台四周的护栏结构均打开,即这种快速地把四周的护栏打开之后完成人员的进入或者离开,或者在高空中完成临时的货物的转移,然而由于现有技术中的护栏结构较为简单,因此无法快速地实现对于四周的护栏同时打开和闭合的技术,这样就使得这种高空作业平台的使用变得局限,特别是在高空作业的时候需要临时打开护栏而转移运送货物到操作平台上的时候就变得效率低下,甚至无法完成。
技术实现要素:
4.为解决上述技术中存在的问题,本发明提供一种方便对于四周护栏进行协同控制敞开和闭合的装置和方法。
5.本发明提供的一种高防护型高空作业车,其包括升降结构、操作平台和防护组件;所述操作平台与所述升降结构连接,所述升降结构用于带动所述操作平台进行升降运动;防护组件设置在所述操作平台上,所述防护组件包括驱动结构、翻转护栏,所述翻转护栏包括转动球、竖向杆体、底部横向杆体、顶部横向杆体、第一安装板体、第二安装板体,所述第一安装板体和第二安装板体位于所述操作平台的侧壁上,所述底部横向杆体可转动地设置在所述第一安装板体和第二安装板体上,所述底部横向杆体穿过连接在所述转动球上,所述转动球的顶部与所述竖向杆体连接,两个所述竖向杆体的顶部位置通过所述顶部横向杆体连接;所述驱动结构与第一组的翻转护栏的底部横向杆体的一端的转动球驱动连接,第一组的翻转护栏的底部横向杆体的另一端则与第二组的翻转护栏啮合驱动连接,所述第二组的翻转护栏还与第三组的翻转护栏和第四组的翻转护栏依次啮合驱动连接,所述第一组翻转护栏、第二组翻转护栏、第三组翻转护栏和第四组翻转护栏依次设置在所述操作平台的四个侧壁位置。
6.上述方案的有益效果为:通过驱动结构的设置,其提供动力而使得转动球进行转
动,同时带动底部横向杆体进行转动,由此使得竖向杆体和顶部横向杆体进行转动,并且在这个过程中实现竖直围挡防护和水平敞开的状态切换;并且这个过程能够同时地实现对于四周的护栏的同时驱动和翻转作用,使用非常便捷,能够快速实现四周护栏的协同打开和闭合,这样就方便了多人的快速进出和货物的临时转运,具有很强的实用性。
7.一个优选的方案是,所述驱动结构包括依次连接的驱动电机、驱动轮齿和从动轮齿,所述从动轮齿连接在垂直弯折的曲柄上,所述弯折曲柄的板体部上连接在所述转动球上;第一组翻转护栏的另一端的转动球也连接在垂直弯折的曲柄上,垂直弯折的曲柄设置在所述第二安装板上,所述第二安装板上通过从动轴杆与所述垂直弯折曲柄的板部连接,所述从动轴杆的从动齿部与第二组翻转护栏的底部横向杆体端部设置的从动斜齿轮啮合连接,所述第二组翻转护栏、第三组翻转护栏和第四组翻转护栏均通过依次连接的垂直弯折曲柄、从动轴杆和从动斜齿轮实现驱动连接;所述升降结构的底部具有移动车,所述升降结构包括了升降气缸和升降滑块,所述升降滑块的顶部连接所述操作平台,所述升降气缸的伸缩杆与所述升降滑块连接,并且所述升降气缸和所述升降滑块为多节连续设置的结构。
8.上述方案的有益效果为:通过驱动电机提供动力,相应地使得驱动齿轮进行转动,由此驱动从动齿轮的转动,进而使得垂直弯折的曲柄进行转动,进而使得转动球跟随转动,当护栏处于竖直放置防护的时候,则竖直杆部与操作平台的侧壁接触而无法继续转动,即护栏的竖直杆体与操作平台处于垂直角度的时候达到了极限位置。另外,当转换至敞口状态的时候,则护栏处于水平放置状态,这个时候的垂直弯折的曲柄转动了90度而也会与操作平台的侧壁接触,这个时候侧壁也对于垂直弯的曲柄起到了限位作用而避免了曲柄的向下继续翻转,这个时候就使得侧部护栏处于水平状态即达到了极限位置,而在高空中的时候当把护栏临时转换为水平敞开状态的时候,则通过这种曲柄与侧壁的限制转动作用可以保持护栏处于水平而也能够起到保护作用。
9.一个优选的方案是,所述竖向杆体的端部外侧具有阻挡板,相邻的两个翻转护栏处于竖直状态的时候则把两个阻挡板进行垂直接触放置,并且第一组的阻挡板上具有手动旋转锁定弯折钩,第二组的阻挡板上具有锁定用卡合槽,所述手动旋转锁定弯折钩可分离地与所述锁定用卡合槽卡合配合锁定。
10.一个优选的方案是,所述竖向杆体的内侧位置具有竖向导向槽和弧形导向槽,所述弧形导向槽与所述竖向导向槽连接;还包括侧部护板、滑动块和垂直弯折片,所述侧部护板位于两个所述竖向杆体之间的位置,所述垂直弯折片具有第一片体、拐角部和第二片体,所述第一片体通过第一滑头可滑动地设置在所述弧形导向槽内,所述滑动块设置在竖向导向槽内,所述滑动块的下端设置有固定柱,所述拐角部可转动的设置在固定柱上所述第二片体与所述侧部护板连接;所述侧部护板的内侧顶部位置具有推拉扶手片;另外,还包括支撑结构,所述支撑结构位于所述竖向杆体的上部位置,所述支撑结构包括弹簧结构、支撑头,所述支撑头的内侧端部通过所述弹簧结构连接在安装缺口的内壁上,所述支撑头可伸缩地位于所述安装缺口的外壁上,所述支撑头的底部为斜面结构。
11.上述方案的有益效果为:通过手动转动锁定弯折钩而进入到锁定用卡合槽,以通
过这种结构而实现对于两侧的阻挡板的卡合固定和快速分离,并且两个阻挡板在竖直防护状态的时候处于贴合状态,而水平敞开的时候则自动分离,使用非常方便。
12.另外,在一些情况下需要在操作平台上方形成一个短暂的或者临时性的支撑结构,而这里通过侧部护板的设置起到了两用的效果,即护板既可以用作为侧部护板,并且可以形成侧部支撑,当为侧部护板的时候则位于底部竖直放置,而向上拉拽扶手片的时候则使得护板向上移动,并且在向上移动的过程中而自动地使得板体由竖直放置转换为水平放置,以形成水平支撑并且通过支撑结构进行临时固定,这个时候就非常方便工作人员的一些临时操作,并且扩大了防护范围和效果,而按压支撑结构之后则可以快速恢复护板从水平至竖直放置,使用非常方便,效果良好。
13.本发明提供的高防护型高空作业车的工作方法,其包括下面的步骤:通过所述升降结构把所述操作平台上升至一定的高度位置进行高空作业,所述翻转护栏以底部设置的底部横向杆体为旋转轴而进行转动,即所述翻转护栏的底部在第一安装板体和第二安装板体上进行转动以形成打开敞口状态或者设置闭合状态;在进行状态切换的时候,则通过所述驱动结构提供动力,相应地使得所述第一组的翻转护栏转动球进行转动从而完成状态切换,同时以此带动所述第二组的翻转护栏、第三组的翻转护栏和第四组的翻转护栏进行状态切换,由此实现对于操作平台的四侧周围的同时打开敞口状态或者闭合状态,当翻转护栏处于竖直放置的时候则处于闭合防护状态,而在水平放置的时候则处于敞开状态。
14.一个优选的方案是,所述驱动电机提供动力使得所述驱动齿轮进行转动,所述驱动齿轮则带动所述从动轮齿进行转动,所述从动轮齿则使得所述弯折曲柄进行转动,所述弯折曲柄则带动所述转动球进行翻转运动,进而完成第一翻转护栏的运动和状态切换;另外,还通过垂直弯折曲柄、从动轴杆和从动斜齿轮的传动而同时带动第二翻转护栏、第三翻转护栏和第四翻转护栏的同时运动和状态切换。
15.一个优选的方案是,包括下面的步骤:所述侧部护板具有竖直放置防护状态和水平放置防护状态;在竖直放置防护状态的时候,则所述第一滑头位于弧形导向槽内,而滑动块位于竖向导向槽内,第一片体则呈横向放置状态,而第二片体处于竖直放置状态并且使得侧部护板处于竖直放置;而在水平放置防护状态的时候,滑动块在竖向导向槽内滑动,当滑动块底部滑动至弧形导向槽与竖向导向槽的交汇处时,则第一滑头从弧形导向槽的底部移动至竖向导向槽与弧形导向槽的交汇处时,这时滑动块在上第一滑头在下,并且当第一滑头移动至竖向滑动槽内时,拐角部在固定柱上转动,带动第二片体转动,使第二片体呈横向放置状态,相继的使侧部护板呈水平放置状态,则所述第一片体处于竖直放置;在把竖直防护状态切换至水平放置防护状态的时候,则拉拽所述推拉扶手片向上运动,进而使得侧部护板向上逐渐地移动,当第一滑头在弧形导向槽内移动的时候会逐渐地低于滑动块的高度,并且在拐角部的时候第一片体通过第一滑头和滑动块而逐渐进行转向而进入到竖向导向槽,这个过程中第二片体变化为水平放置并且带动侧部护板处于水平状态;然后继续向上运动,并且通过第二片体与斜面结构的接触而使得支撑头按压弹簧结构向内侧运动,并且第二片体和侧部板体移动至支撑头上方位置的时候则支撑头自动复位,并且通过支撑头对于第二片体起到支撑作用,由此使得侧部护板处于水平放置防护状
态。
附图说明
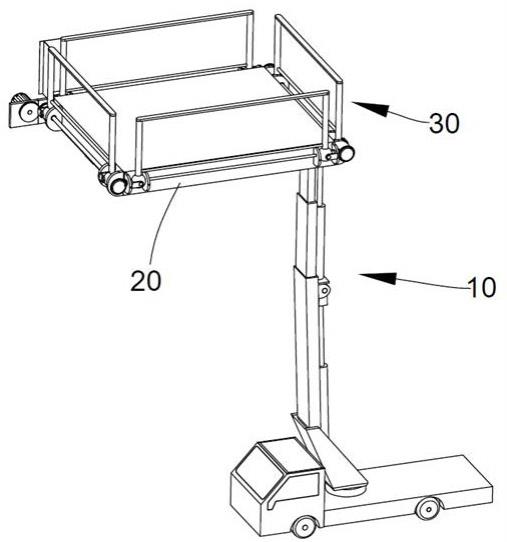
16.图1是本发明的一种高防护型高空作业车结构示意图;图2是本发明的一种高防护型高空作业车局部的结构示意图;图3是本发明的一种高防护型高空作业车局部的结构示意图;图4是本发明的一种高防护型高空作业车局部的结构示意图;图5是本发明的一种高防护型高空作业车局部的结构示意图;图6是图5中a区的放大结构示意图;图7是本发明的一种高防护型高空作业车局部的结构示意图;图8是图7中b区的放大结构示意图;图9是本发明的一种高防护型高空作业车局部的结构示意图;图10是本发明的一种高防护型高空作业车垂直弯折片的结构示意图;图11是图9中c区的放大结构示意图。
具体实施方式
17.第一实施例:如图1至图2所示,本发明提供的一种高防护型高空作业车,其包括升降结构10、操作平台20和防护组件30;所述操作平台20与所述升降结构10连接,所述升降结构10用于带动所述操作平台20进行升降运动;防护组件30设置在所述操作平台20上,所述防护组件30包括驱动结构40、翻转护栏50,所述翻转护栏50包括转动球61、竖向杆体62、底部横向杆体63、顶部横向杆体64、第一安装板体65、第二安装板体66,所述第一安装板体65和第二安装板体66位于所述操作平台20的侧壁上,所述底部横向杆体63可转动地设置在所述第一安装板体65和第二安装板体66上,所述底部横向杆体63穿过连接在所述转动球61上,所述转动球61的顶部与所述竖向杆体62连接,两个所述竖向杆体62的顶部位置通过所述顶部横向杆体64连接;所述驱动结构40与第一组的翻转护栏70的底部横向杆体63的一端的转动球61驱动连接,第一组的翻转护栏70的底部横向杆体63的另一端则与第二组的翻转护栏80啮合驱动连接,所述第二组的翻转护栏80还与第三组的翻转护栏90和第四组的翻转护栏100依次啮合驱动连接,所述第一组翻转护栏70、第二组翻转护栏80、第三组翻转护栏90和第四组翻转护栏100依次设置在所述操作平台20的四个侧壁位置。
18.本发明提供的高防护型高空作业车的工作方法,其包括下面的步骤:通过所述升降结构10把所述操作平台20上升至一定的高度位置进行高空作业,所述翻转护栏50以底部设置的底部横向杆体63为旋转轴而进行转动,即所述翻转护栏50的底部在第一安装板体65和第二安装板体66上进行转动以形成打开敞口状态或者设置闭合状态;在进行状态切换的时候,则通过所述驱动结构40提供动力,相应地使得所述第一组的翻转护栏70转动球61进行转动从而完成状态切换,同时以此带动所述第二组的翻转护
栏80、第三组的翻转护栏90和第四组的翻转护栏100进行状态切换,由此实现对于操作平台20的四侧周围的同时打开敞口状态或者闭合状态,当翻转护栏50处于竖直放置的时候则处于闭合防护状态,而在水平放置的时候则处于敞开状态。
19.通过驱动结构的设置,其提供动力而使得转动球进行转动,同时带动底部横向杆体进行转动,由此使得竖向杆体和顶部横向杆体进行转动,并且在这个过程中实现竖直围挡防护和水平敞开的状态切换;并且这个过程能够同时地实现对于四周的护栏的同时驱动和翻转作用,使用非常便捷,能够快速实现四周护栏的协同打开和闭合,这样就方便了多人的快速进出和货物的临时转运,具有很强的实用性。
20.第二实施例:如图3至图8所示,本实施例的所述驱动结构40包括依次连接的驱动电机41、驱动轮齿42和从动轮齿43,所述从动轮齿43连接在垂直弯折的曲柄44上,所述弯折曲柄44的板体部上连接在所述转动球61上;第一组翻转护栏70的另一端的转动球61也连接在垂直弯折的曲柄44上,垂直弯折的曲柄44可转动地设置在所述第二安装板66上,所述第二安装板66上通过从动轴杆67与所述垂直弯折曲柄44的板部连接,所述从动轴杆67的从动齿部68与第二组翻转护栏80的底部横向杆体63端部设置的从动斜齿轮69啮合连接,所述第二组翻转护栏80、第三组翻转护栏90和第四组翻转护栏100均通过依次连接的垂直弯折曲柄44、从动轴杆67和从动斜齿轮69实现驱动连接;所述升降结构10的底部具有移动车11,所述升降结构10包括了升降气缸12和升降滑块13,所述升降滑块13的顶部连接所述操作平台20,所述升降气缸12的伸缩杆与所述升降滑块13连接,并且所述升降气缸12和所述升降滑块13为多节连续设置的结构。另外,本实施例的升降结构10还可以采用现有的其它类型的高空作业车的升降结构。
21.所述竖向杆体62的端部外侧具有阻挡板112,相邻的两个翻转护栏60处于竖直状态的时候则把两个阻挡板112进行垂直接触放置,并且第一组的阻挡板73上具有手动旋转锁定弯折钩71,第二组的阻挡板74上具有锁定用卡合槽81,所述手动旋转锁定弯折钩71可分离地与所述锁定用卡合槽81卡合配合锁定。
22.所述驱动电机41提供动力使得所述驱动齿轮42进行转动,所述驱动齿轮42则带动所述从动轮齿43进行转动,所述从动轮齿43则使得所述弯折曲柄44进行转动,所述弯折曲柄44则带动所述转动球61进行翻转运动,进而完成第一翻转护栏91的运动和状态切换;另外,还通过垂直弯折曲柄44、从动轴杆67和从动斜齿轮68的传动而同时带动第二翻转护栏92、第三翻转护栏93和第四翻转护栏94的同时运动和状态切换。
23.第三实施例:如图9至图11所示,所述竖向杆体62的内侧位置具有竖向导向槽101和弧形导向槽102,所述弧形导向槽101与所述竖向导向槽102连接;还包括侧部护板103、滑动块104和垂直弯折片105,所述侧部护板103位于两个所述竖向杆体62之间的位置,所述垂直弯折片105具有第一片体106、拐角部107和第二片体108,所述第一片体106通过第一滑头109可滑动地设置在所述弧形导向槽102内,所述滑动块104设置在竖向导向槽101内,所述滑动块的下端设置有固定柱110,所述拐角部107可转动的设置在固定柱110上,所述第二片体108与所述侧部护板103连接;所述侧部护板103的
内侧顶部位置具有推拉扶手片121;另外,还包括支撑结构140,所述支撑结构140位于所述竖向杆体62的上部位置,所述支撑结构140包括弹簧结构141、支撑头142,所述支撑头142的内侧端部通过所述弹簧结构141连接在安装缺口143的内壁上,所述支撑头142可伸缩地位于所述安装缺口143的外壁上,所述支撑头142的底部为斜面结构144。
24.包括下面的步骤:所述侧部护板103具有竖直放置防护状态和水平放置防护状态;在竖直放置防护状态的时候,则所述第一滑头109位于弧形导向槽102内,而滑动块104位于竖向导向槽101内,第一片体106则呈横向放置状态,而第二片体108处于竖直放置状态并且使得侧部护板103处于竖直放置;而在水平放置防护状态的时候,滑动块104在竖向导向槽101内滑动,当滑动块104底部滑动至弧形导向槽102与竖向导向槽101的交汇处187时,则第一滑头109从弧形导向槽102的底部逐渐移动至竖向导向槽101与弧形导向槽102的交汇处时,这时滑动块104在上而第一滑头109在下,并且当第一滑头109移动至竖向滑动槽101内时,拐角部107在固定柱110上转动,带动第二片体108转动,使第二片体108呈横向放置状态,相继的使侧部护板103呈水平放置状态,则所述第一片体106处于竖直放置。
25.在把竖直防护状态切换至水平放置防护状态的时候,则拉拽所述推拉扶手片121向上运动,进而使得侧部护板103向上逐渐地移动,当第一滑头109在弧形导向槽102内移动的时候会逐渐地低于滑动块104的高度,并且在拐角部107的时候第一片体106通过第一滑头109和滑动块104而逐渐进行转向而进入到竖向导向槽101,这个过程中第二片体108变化为水平放置并且带动侧部护板103处于水平状态;然后继续向上运动,并且通过第二片体108与斜面结构144的接触而使得支撑头142按压弹簧结构141向内侧运动,并且第二片体108和侧部护板103移动至支撑头142上方位置的时候则支撑头142自动复位,并且通过支撑头142对于第二片体108起到支撑作用,由此使得侧部护板103处于水平放置防护状态。当需要向下移动护板103的时候则手动按压支撑头142而使得支撑头带动弹簧结构141向内部位置移动压缩进而失去对于护板103和第二片体108的支撑而进行下移。
26.通过手动转动锁定弯折钩而进入到锁定用卡合槽,以通过这种结构而实现对于两侧的阻挡板的卡合固定和快速分离,并且两个阻挡板在竖直防护状态的时候处于贴合状态,而水平敞开的时候则自动分离,使用非常方便。
27.另外,在一些情况下需要在操作平台上方形成一个短暂的或者临时性的支撑结构,而这里通过侧部护板的设置起到了两用的效果,即护板既可以用作为侧部护板,并且可以形成侧部支撑,当为侧部护板的时候则位于底部竖直放置,而向上拉拽扶手片的时候则使得护板向上移动,并且在向上移动的过程中而自动地使得板体由竖直放置转换为水平放置,以形成水平支撑并且通过支撑结构进行临时固定,这个时候就非常方便工作人员的一些临时操作,并且扩大了防护范围和效果,而按压支撑结构之后则可以快速恢复护板从水平至竖直放置,使用非常方便,效果良好。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1