自主爬升操作平台及其施工方法与流程
1.本发明涉及建筑施工领域,特指一种自主爬升操作平台及其施工方法。
背景技术:
2.随着钢结构建筑行业的不断发展,超高层建筑不断涌现,100m以上的超高层基本采用钢结构、筒体结构等,框架柱设计均采用型钢混凝土柱,钢结构施工通常是利用焊接平台将钢柱分段吊装并焊接成一整体,然而,目前超高层钢结构施工普遍采用大型塔吊吊装操作平台,由于超高层建筑高度较高,这种方式不仅存在一定的安全风险,而且会造成塔吊利用率不足,严重影响现场施工进度。
技术实现要素:
3.本发明的目的在于克服现有技术的缺陷,提供一种自主爬升操作平台及其施工方法,解决了传统利用塔吊吊装操作平台费时费力的问题,通过操作平台自主沿钢柱向上爬升,以完成对钢柱的施工,避免使用大型塔吊,不仅能够保证施工安全,还能提升施工效率。
4.实现上述目的的技术方案是:
5.本发明提供了一种自主爬升操作平台,安装于钢柱,且该钢柱的侧部间隔设置有若干牛腿,该自主爬升操作平台包括:
6.套设于钢柱的下平台,该下平台对应牛腿的位置开设有第一开口,下平台对应第一开口位置可调地安装有调节杆,通过调节该调节杆的位置,以封堵或敞开第一开口;
7.套设于钢柱且位于下平台的上方的上平台,上平台对应牛腿的位置开设有第二开口,上平台对应第二开口位置可调地安装有踏板,通过调节踏板的位置,以封堵或敞开第二开口;以及
8.竖直连接于上平台和下平台之间且长度可调的若干伸缩杆。
9.本发明提供了一种自主爬升操作平台,通过移动调节杆以封堵第一开口,从而下平台能够架设于牛腿上,伸长伸缩杆,以推顶上平台向上移动,当上平台靠近上方的牛腿时,移动踏板以敞开第二开口,从而上平台能够通过对应的牛腿,通过该牛腿后,移动踏板以封闭第二开口,从而上平台能够架设于对应的牛腿顶部,收缩该伸缩杆,以带动下平台向上移动,当下平台靠近牛腿时,移动调节杆以敞开第一开口,从而下平台能够通过对应的牛腿,循环上述步骤,该自主爬升操作平台能够沿钢柱向上爬升,不需要使用大型塔吊提升该操作平台,解决了传统利用塔吊吊装操作平台费时费力的问题,通过操作平台自主沿钢柱向上爬升,以完成对钢柱的施工,避免使用大型塔吊,不仅能够保证施工安全,还能提升施工效率。
10.本发明自主爬升操作平台的进一步改进在于,该钢柱的横截面呈矩形;
11.该自主爬升操作平台还包括位置可调地安装于上平台靠近钢柱的转角处的导向轮,该导向轮抵住钢柱的转角处,通过向靠近钢柱的方向移动导向轮,使得导向轮抵紧钢柱,从而导向轮沿钢柱向上移动。
12.本发明自主爬升操作平台的进一步改进在于,导向轮形成有与钢柱的转角相匹配的凹槽,该钢柱的转角卡设于凹槽内。
13.本发明自主爬升操作平台的进一步改进在于,还包括安装于上平台靠近钢柱的转角处的气缸,导向轮转动连接于气缸远离上平台的端部,通过伸长气缸,以顶推导向轮向靠近钢柱的方向移动,从而导向轮抵紧钢柱的转角。
14.本发明自主爬升操作平台的进一步改进在于,还包括安装于下平台靠近第一开口的位置且与调节杆控制连接的第一传感器,通过第一传感器感应到下平台移动至靠近牛腿的位置,以控制调节杆移动,使得第一开口敞开,从而下平台能够通过牛腿,进而第一传感器感应到下平台通过牛腿,以控制调节杆移动并封堵第一开口,从而下平台能够架设于牛腿的顶部。
15.本发明自主爬升操作平台的进一步改进在于,下平台包括两两平行设置且围合呈矩形的四根管件,该管件对应牛腿的位置截断形成第一开口,调节杆插设于管件,通过沿管件移动调节杆,使得调节杆自管件的截断处伸出并封堵第一开口。
16.本发明自主爬升操作平台的进一步改进在于,还包括安装于上平台靠近第二开口的位置且与踏板控制连接的第二传感器,通过第二传感器感应到上平台移动至靠近牛腿的位置,以控制踏板移动,使得第二开口敞开,从而上平台能够通过牛腿,进而第二传感器感应到上平台通过牛腿,以控制踏板移动并封堵第二开口,从而上平台能够架设于牛腿的顶部。
17.本发明自主爬升操作平台的进一步改进在于,还包括安装于上平台的底部靠近第二开口的位置的滑轨,踏板滑设于滑轨,通过踏板沿滑轨移动,使得踏板封堵或敞开第二开口。
18.本发明自主爬升操作平台的进一步改进在于,还包括安装于上平台的外侧的围栏,该围栏对应第二开口的位置形成有缺口。
19.本发明提供了一种自主爬升操作平台的施工方法,包括如下步骤:
20.提供自主爬升操作平台,将该自主爬升才做平台套设于钢柱,调节该调节杆的位置,以封堵第一开口,使得下平台能够置于牛腿的顶部;
21.伸长该伸缩件,以推顶上平台向上移动,当上平台靠近对应的牛腿时,调节踏板的位置,以敞开第二开口,使得上平台能够通过对应的牛腿;
22.当上平台通过对应的牛腿后,调节踏板的位置,以封闭第二开口,使得上平台能够架设于对应的牛腿的顶部,进而缩短伸缩杆,以带动下平台向上移动;
23.当下平台移动至靠近对应的牛腿时,调节该调节杆的位置,以敞开第一开口,使得下平台能够通过对应的牛腿。
附图说明
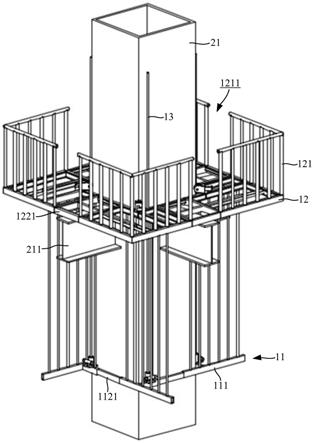
24.图1为本发明自主爬升操作平台的使用状态立体图。
25.图2为本发明自主爬升操作平台中下平台部分的俯视图,此时调节杆位于管件内且第一开口敞开。
26.图3为本发明自主爬升操作平台中下平台部分的俯视图,此时调节杆伸出并封堵第一开口。
27.图4为本发明自主爬升操作平台中上平台部分的俯视图,此时第一开口敞开。
28.图5为本发明自主爬升操作平台中上平台部分的俯视图,此时踏板封堵第一开口。
具体实施方式
29.下面结合附图和具体实施例对本发明作进一步说明。
30.参阅图1,本发明提供了一种自主爬升操作平台及其施工方法,通过移动调节杆以封堵第一开口,从而下平台能够架设于牛腿上,伸长伸缩杆,以推顶上平台向上移动,当上平台靠近上方的牛腿时,移动踏板以敞开第二开口,从而上平台能够通过对应的牛腿,通过该牛腿后,移动踏板以封闭第二开口,从而上平台能够架设于对应的牛腿顶部,收缩该伸缩杆,以带动下平台向上移动,当下平台靠近牛腿时,移动调节杆以敞开第一开口,从而下平台能够通过对应的牛腿,循环上述步骤,该自主爬升操作平台能够沿钢柱向上爬升,不需要使用大型塔吊提升该操作平台,解决了传统利用塔吊吊装操作平台费时费力的问题,通过操作平台自主沿钢柱向上爬升,以完成对钢柱的施工,避免使用大型塔吊,不仅能够保证施工安全,还能提升施工效率。下面结合附图对本发明自主爬升操作平台进行说明。
31.参阅图1,图1为本发明自主爬升操作平台的使用状态立体图。下面结合图1,对本发明自主爬升操作平台进行说明。
32.如图1所示,本发明的自主爬升操作平台,安装于钢柱21,且该钢柱21的侧部间隔设置有若干牛腿211,该自主爬升操作平台包括:
33.套设于钢柱21的下平台11,该下平台11对应牛腿211的位置开设有第一开口112,下平台11对应第一开口112位置可调地安装有调节杆1121,通过调节该调节杆1121的位置,以封堵或敞开第一开口112;
34.套设于钢柱21且位于下平台11的上方的上平台12,上平台12对应牛腿211的位置开设有第二开口122,上平台12对应第二开口122位置可调地安装有踏板1221,通过调节踏板1221的位置,以封堵或敞开第二开口122;以及
35.竖直连接于上平台12和下平台11之间且长度可调的若干伸缩杆13。
36.具体的,还包括安装于上平台12的外侧的围栏121,该围栏121对应第二开口122的位置形成有缺口1211。
37.作为本发明的一较佳实施方式,结合图4所示,该钢柱21的横截面呈矩形;
38.该自主爬升操作平台还包括位置可调地安装于上平台12靠近钢柱21的转角处的导向轮1231,该导向轮1231抵住钢柱21的转角处,通过向靠近钢柱21的方向移动导向轮1231,使得导向轮1231抵紧钢柱21,从而导向轮1231沿钢柱21向上移动,该导向轮1231对上、下平台的移动起到导向作用。
39.较佳地,该导向轮1231为防坠轮,即反向转动时具有较大的摩擦力,从而能够防止上、下平台坠落。
40.具体的,导向轮1231形成有与钢柱21的转角相匹配的凹槽,该钢柱21的转角卡设于凹槽内。
41.具体的,还包括安装于上平台12靠近钢柱21的转角处的气缸123,导向轮1231转动连接于气缸123远离上平台12的端部,通过伸长气缸123,以顶推导向轮1231向靠近钢柱21的方向移动,从而导向轮1231抵紧钢柱21的转角。
42.进一步的,结合图2和图3所示,还包括安装于下平台11靠近第一开口112的位置且与调节杆1121控制连接的第一传感器,通过第一传感器感应到下平台11移动至靠近牛腿211的位置,以控制调节杆1121移动,使得第一开口112敞开,从而下平台11能够通过牛腿211,进而第一传感器感应到下平台11通过牛腿211,以控制调节杆1121移动并封堵第一开口112,从而下平台11能够架设于牛腿211的顶部。
43.较佳地,该第一传感器可安装于调节杆1121的上方,当第一传感器感应到牛腿211时控制调节杆1121移动以敞开第一开口112,当第一传感器感应不到牛腿211时,此时第一传感器通过了牛腿211,可以预先设定当第一传感器感应不到牛腿211几秒后控制调节杆1121移动以封闭第一开口112,即预留几秒使得下平台11对应调节杆1121的位置通过牛腿211。
44.具体的,下平台11包括两两平行设置且围合呈矩形的四根管件111,该管件111对应牛腿211的位置截断形成第一开口112,调节杆1121插设于管件111,通过沿管件111移动调节杆1121,使得调节杆1121自管件111的截断处伸出并封堵第一开口112。
45.进一步的,结合图4和图5所示,还包括安装于上平台12靠近第二开口122的位置且与踏板1221控制连接的第二传感器,通过第二传感器感应到上平台12移动至靠近牛腿211的位置,以控制踏板1221移动,使得第二开口122敞开,从而上平台12能够通过牛腿211,进而第二传感器感应到上平台12通过牛腿211,以控制踏板1221移动并封堵第二开口122,从而上平台12能够架设于牛腿211的顶部。
46.较佳地,该第二传感器可安装于踏板1221的上方,当第二传感器感应到牛腿211时控制踏板1221移动以敞开第二开口122,当第二传感器感应不到牛腿211时,此时第二传感器通过了牛腿211,可以预先设定当第二传感器感应不到牛腿211几秒后控制踏板1221移动以封闭第二开口122,即预留几秒使得上平台12对应踏板1221的位置通过牛腿211。
47.具体的,还包括安装于上平台12的底部靠近第二开口122的位置的滑轨,踏板1221滑设于滑轨,通过踏板1221沿滑轨移动,使得踏板1221封堵或敞开第二开口122。
48.较佳地,该第一传感器和第二传感器可以是红外线传感器。
49.本发明的具体实施方法如下:
50.将自主爬升操作平台套设于钢柱21,此时调节杆1121封堵第一开口112,从而下平台11能够置于牛腿211的顶部;
51.伸长伸缩杆13,以推顶上平台12向上移动,此时导向轮1231沿着钢柱21向上滚动,当第二传感器感应到上平台12靠近牛腿211时,控制踏板1221移动以敞开第二开口122,从而上平台12通过牛腿211;
52.当第二传感器感应到上平台12通过牛腿211后,调节踏板1221的位置,以封闭第二开口122,使得上平台12能够架设于对应的牛腿211的顶部,此时施工人员可在上平台12对钢柱21进行施工;
53.施工完毕后,缩短伸缩杆13,以带动下平台11向上移动,当第一传感器感应到下平台11移动至靠近对应的牛腿211时,调节该调节杆1121的位置,以敞开第一开口112,使得下平台11能够通过对应的牛腿211;
54.当第一传感器感应到下平台11通过对应的牛腿211后,调节该调节杆1121的位置,以封闭第一开口112,使得下平台11能够架设于对应的牛腿211的顶部,伸长伸缩杆13,以推
顶上平台12向上移动;
55.即上、下平台交替向上移动,从而完成对钢柱21的施工,以实现上平台12沿钢柱21的自主爬升,无需借助大型塔吊,省时省力。
56.本发明还提供了一种自主爬升操作平台的施工方法,包括如下步骤:
57.提供自主爬升操作平台,将该自主爬升才做平台套设于钢柱21,调节该调节杆1121的位置,以封堵第一开口112,使得下平台11能够置于牛腿211的顶部;
58.伸长该伸缩件13,以推顶上平台12向上移动,当上平台12靠近对应的牛腿211时,调节踏板1221的位置,以敞开第二开口122,使得上平台12能够通过对应的牛腿211;
59.当上平台12通过对应的牛腿211后,调节踏板1221的位置,以封闭第二开口122,使得上平台12能够架设于对应的牛腿211的顶部,进而缩短伸缩杆13,以带动下平台11向上移动;
60.当下平台11移动至靠近对应的牛腿211时,调节该调节杆1121的位置,以敞开第一开口112,使得下平台11能够通过对应的牛腿211。
61.本发明提供的施工方法实际实施具体操作方式如下:
62.将自主爬升操作平台套设于钢柱21,此时调节杆1121封堵第一开口112,从而下平台11能够置于牛腿211的顶部;
63.伸长伸缩杆13,以推顶上平台12向上移动,此时导向轮1231沿着钢柱21向上滚动,当第二传感器感应到上平台12靠近牛腿211时,控制踏板1221移动以敞开第二开口122,从而上平台12通过牛腿211;
64.当第二传感器感应到上平台12通过牛腿211后,调节踏板1221的位置,以封闭第二开口122,使得上平台12能够架设于对应的牛腿211的顶部,此时施工人员可在上平台12对钢柱21进行施工;
65.施工完毕后,缩短伸缩杆13,以带动下平台11向上移动,当第一传感器感应到下平台11移动至靠近对应的牛腿211时,调节该调节杆1121的位置,以敞开第一开口112,使得下平台11能够通过对应的牛腿211;
66.当第一传感器感应到下平台11通过对应的牛腿211后,调节该调节杆1121的位置,以封闭第一开口112,使得下平台11能够架设于对应的牛腿211的顶部,伸长伸缩杆13,以推顶上平台12向上移动;
67.即上、下平台交替向上移动,从而完成对钢柱21的施工,以实现上平台12沿钢柱21的自主爬升,无需借助大型塔吊,省时省力。
68.以上结合附图实施例对本发明进行了详细说明,本领域中普通技术人员可根据上述说明对本发明做出种种变化例。因而,实施例中的某些细节不应构成对本发明的限定,本发明将以所附权利要求书界定的范围作为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1