管模经位定位装置以及定位方法与流程
1.本发明实施例涉及建筑领域,具体涉及到一种管模经位定位装置以及定位方法。
背景技术:
2.管桩是一种重要的桩基材料,也是重要的水泥制品,已被广泛应用于各类建筑物和构筑的基础工程,如高层建筑、公共建筑、工业与民用建筑、港口、码头、高速公路等领域。
3.管桩机是一种专门用来制造管桩的设备。
4.管桩机在生产制程中,存在一个特殊的工艺,管桩机模具在装满料时,其重量可达几十吨,管模初始放置时其经位朝上,但是在管模高速离心阶段,因管模与管轮(支撑管模的导轮)之间会存在打滑导致启动时两者的相对位置与最终停机时的相对位置会发生变化,无法通过起始位置的方式计算出停止的位置,从而使得管模在停止运转后不能使管模的经位朝上。离心完毕的管模需要通过行车的抓取将管模移至加热炉,而行车在抓取管模时必须抓住朝上的经位才能安全移走,由于经位不能自动朝上,需要采取的方法是通过人工去点动驱动器驱动器的操作,让管模运行在较低的频率,但由于管模重量大,存在较大的运动惯量,停机时管模会产生滑移,需要通过多次尝试才能把管模经位固定朝上;上述方法不但需要人工参与,而且操作的效率很低;缺点,需要派专人值守,定准困难,生产效率低。
技术实现要素:
5.有鉴于此,本发明实施例的目的是提供一种管模经位定位装置以及定位方法,用于解决管模经位定位效率慢,精度低的问题。
6.本发明第一方面公开了一种管模经位定位装置,包括:
7.驱动器,包括第一接线端、第二接线端以及第三接线端;
8.电机,包括第一端、第二端以及第三端;所述第一端设置有输出轴,第二端设置有编码器,所述编码器通过信号线与所述第一接线端相连;第三端通过动力线与所述第三接线端相连;
9.控制器,与所述驱动器以及所述电机电连接;
10.轮轴组件,与所述输出轴通过皮带连接;
11.管模,活动安装在所述轮轴组件上;
12.永磁体,安装在所述管模的外环面上;
13.磁性接近开关,固定安装在所述轮轴组件上且与所述第二接线端电性连接;
14.所述磁性接近开关用于检测所述永磁体与所述磁性接近开关之间的距离;在所述永磁体与所述磁性接近开关之间的距离小于预设距离的情形下,所述磁性接近开关输出信号至所述控制器,所述控制器将所述驱动器的模式由速度模式切换成位置控制模式,并将所述编码器的脉冲值清零。
15.进一步的,所述轮轴组件包括:
16.固定座,安装在工作平台上,所述固定座上设置有安装孔;
17.转轴,贯穿所述安装孔后与所述固定座转动连接;
18.主动轮,固定在所述转轴上,所述主动轮上环绕有所述皮带,通过所述电机驱动输出轴转动,从而通过皮带带动所述主动轮以及所述转轴转动。
19.所述轮轴组件还包括:第一滚轮组件以及第二滚轮组件,所述第一滚轮组件包括:
20.第一连杆,与所述转轴的轴向拼接成一体;
21.第一滚轮,设置有多个,各个第一滚轮依次固定串接在所述第一连杆上。
22.进一步的,所述第二滚轮组件包括:
23.第二连杆;
24.第二滚轮,设置的数量与所述第一滚轮的数量相同,各个第二滚轮依次串接在所述第二连杆上;所述第二滚轮与所述第一滚轮组成所述管模的承托件。
25.进一步的,所述管模的外侧面固定环绕有多个凸缘,各个凸缘与所述第一滚轮以及所述第二滚轮相切,通过转轴带动所述第一滚轮从而带动所述管模转动。
26.进一步的,所述磁性接近开关固定安装在所述固定座上。
27.本发明第二方面公开了一种管模经位定位方法,所述方法包括:
28.将永磁体安装在所述管模靠近轮轴组件的一侧,将磁性接近开关固定安装在轮轴组件上,并使磁性接近开关的中心线与所述永磁体的中心线设置在同一平面上;
29.启动电机,电机通过皮带带动轮轴组件从而带动管模转动;
30.管模高速离心完成后,驱动器控制电机减速,在减速过程中,当管模运行频率小于等于预设频率时,磁性接近开关开启;
31.在管模转动过程中,检测永磁体与磁性接近开关之间的距离,当所述永磁体与磁性接近开关之间的距离小于等于预设阈值时,磁性接近开关发送信号至控制器。
32.进一步的,磁性接近开关发送信号至控制器的步骤之后,包括:
33.接收到磁性接近开关发送的信号后,将驱动器的速度模式切换成位置控制模式;
34.记录当前编码器的脉冲值后,将所述编码器的脉冲值清零;
35.通过预先设定的偏移值确定脉冲偏差值;
36.通过所述脉冲偏差值,确定驱动器的第一输出频率。
37.进一步的,通过所述脉冲偏差值,确定驱动器的第一输出频率的步骤之后包括:
38.通过限辐处理,将所述驱动器输出的第一输出频率控制在预设频率以下,得到第二输出频率;
39.根据所述脉冲偏差值,确定管模停止运动的预设位置;
40.驱动器根据所述第二输出频率以及管模停止运动的预设位置控制电机带动管模转动;
41.当管模停止运动的实际位置与所述管模停止运动的预设位置的差值小于预设偏差时,将电机锁轴。
42.本发明实施例提供的管模经位定位装置,通过磁性接近开关检测所述永磁体与所述磁性接近开关之间的距离;在所述永磁体与所述磁性接近开关之间的距离小于预设距离的情形下,所述磁性接近开关输出信号至所述控制器,所述控制器将所述驱动器的模式由速度模式切换成位置控制模式,并将所述编码器的脉冲值清零;本发明实施例利用磁性接近开关的特性,在永磁体与磁性接近开关之间的距离达到最短距离时,磁性接近开关与所
述永磁体位于同一水平线上,此时将编码器清零,即可通过编码器记录管模滑移的行程,从而通过控制电机带动管模移动至经位,实现精准定位,采用本发明装置的定位速度快,且不需要反复校正。
附图说明
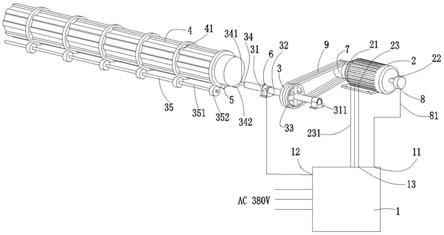
43.图1为本发明的实施例一的一种管模经位定位装置的结构示意图;
44.图2为本发明的实施例二的步骤s101~s104的流程框图;
45.图3为本发明的实施例二的步骤s105~s107的流程框图;
46.图4为本发明的实施例二的步骤s108~s111的流程框图。
47.元素列表如下:
48.1、驱动器;
49.2、电机;
50.3、轮轴组件;
51.4、管模;
52.5、永磁体;
53.6、磁性接近开关;
54.7、输出轴;
55.8、编码器;
56.9、皮带;
57.11、第一接线端;
58.12、第二接线端;
59.13、第三接线端;
60.21、第一端;
61.22、第二端;
62.23、第三端;
63.31、固定座;
64.32、转轴;
65.33、主动轮;
66.34、第一滚轮组件;
67.35、第二滚轮组件;
68.41、凸缘;
69.81、信号线;
70.231、动力线;
71.311、安装孔;
72.341、第一连杆;
73.342、第一滚轮;
74.351、第二连杆;
75.352、第二滚轮。
具体实施方式
76.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
77.实施例一:
78.如图1所示的一种管模经位定位装置,包括:驱动器1、电机2、控制器(图未示)、轮轴组件3、管模4、永磁体5、磁性接近开关6;
79.所述驱动器1包括第一接线端11、第二接线端12以及第三接线端13;
80.驱动器1为伺服驱动器,是用来控制伺服电机的一种控制器,其作用类似于变频器作用于普通交流马达,属于伺服系统的一部分,主要应用于高精度的定位系统。一般是通过位置、速度和力矩三种方式对伺服电机进行控制,实现高精度的传动系统定位。
81.本实施例中的控制器为变频驱动控制器,一种具有微处理机的数字电子设备,用于驱动电动机以及各种管桩控制逻辑的控制器,。控制器主要由中央dsp控制中心、电源部分、igbt驱动部分组成。
82.所述电机2包括第一端21、第二端22以及第三端23;所述第一端21设置有输出轴7,第二端22设置有编码器8,所述编码器8通过信号线81与所述第一接线端11相连;第三端23通过动力线231与所述第三接线端13相连;
83.本实施例中的电机2优选为变频电机,可以将电压信号转化为转矩和转速以驱动控制对象。
84.编码器8是将信号或数据进行编制、转换为可用以通讯、传输和存储的信号形式的设备。编码器8把角位移或直线位移转换成电信号,前者称为码盘,后者称为码尺。按照工作原理编码器可分为增量式和绝对式两类。增量式编码器是将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小。绝对式编码器的每一个位置对应一个确定的数字码,因此它的示值只与测量的起始和终止位置有关,而与测量的中间过程无关。本实施例采用增量式编码器,通过编码器8的脉冲值记录位移值。
85.所述控制器与所述驱动器1以及所述电机2电连接;
86.轮轴组件3与所述输出轴7通过皮带9连接;
87.管模4,活动安装在所述轮轴组件3上;
88.永磁体5,安装在所述管模4的外环面上;
89.磁性接近开关6,固定安装在所述轮轴组件3上且与所述第二接线端12电性连接;磁性接近开关6是接近开关的一种,利用电磁工作原理,磁性接近开关6通过检测磁性物体,然后产生触发开关信号输出。
90.所述磁性接近开关6用于检测所述永磁体5与所述磁性接近开关6之间的距离;在所述永磁体5与所述磁性接近开关6之间的距离小于预设距离的情形下,所述预设距离为永磁体5与磁性接近开关6之间的最小距离,本实施例中的管模4一般为圆柱型,与管桩的形状匹配,永磁体5安装在管模4的外侧面上,在管模4每转动一圈时,永磁体5与磁性接近开关6之间就会存在一次最短距离,在实际调试过程中,因为信号输出需要时间,所以一般会将预设距离比最短距离大0.1~0.5mm,通过磁性接近开关6检测距离,在所述永磁体5与所述磁
性接近开关6之间的距离小于预设距离的情形下;所述磁性接近开关6输出信号至所述控制器,所述控制器将所述驱动器1的模式由速度模式切换成位置控制模式,并将所述编码器8的脉冲值清零。
91.本发明实施例利用磁性接近开关6的特性,在永磁体5与磁性接近开关6之间的距离达到最短距离时,磁性接近开关6与所述永磁体5位于同一水平线上,此时将编码器8清零,即可通过编码器8记录管模4滑移的行程,从而通过控制电机带动管模4移动至经位,实现精准定位,采用本发明装置的定位速度快,且不需要反复校正。
92.需要说明的是,驱动器1存在三种模式,位置控制模式、速度模式、以及转矩控制模式;
93.具体地,位置控制模式一般是通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定转动的角度。由于位置模式可以对速度和位置都有很严格的控制,所以一般应用于定位装置。
94.速度控制是通过模拟量的输入或脉冲的频率都可以进行转动速度的控制,在有上位控制装置的外环pid控制时速度模式也可以进行定位,但必须把电机的位置信号或直接负载的位置信号给上位反馈以做运算用。位置模式也支持直接负载外环检测位置信号,此时的电机轴端的编码器8只检测电机位置,位置信号就由直接的最终负载端的检测装置提供,这样的优点在于可以减少中间传动过程中的误差,增加了整个系统的定位精度。
95.转矩控制模式实际就是控制电机的电流,转矩环是速度环的内环,一般在一些需要精确控制力矩的场合才采用这种模式,比如一些卷绕和张力控制的环节,可以让速度环饱和,通过电流限位的模式来实现转矩控制。
96.优选地,所述轮轴组件3包括:固定座31、转轴32以及主动轮33;所述固定座31安装在工作平台上,所述固定座31上设置有安装孔311;转轴32贯穿所述安装孔311后与所述固定座31转动连接;主动轮33固定在所述转轴32上,所述主动轮33上环绕有所述皮带9,通过所述电机2驱动输出轴7转动,从而通过皮带9带动所述主动轮33以及所述转轴32转动。
97.优选地,所述轮轴组件3还包括第一滚轮组件34以及第二滚轮组件35,第一滚轮组件34与所述第二滚轮组件35的结构与尺寸均相同;所述第一滚轮组件34包括:第一连杆341以及第一滚轮342,所述第一连杆341与所述转轴32的轴向拼接成一体;第一滚轮342设置有多个,各个第一滚轮342依次固定串接在所述第一连杆341上。
98.进一步的,所述第二滚轮组件35包括第二连杆351以及第二滚轮352,第二滚轮352设置的数量与所述第一滚轮342的数量相同,各个第二滚轮352依次串接在所述第二连杆351上;所述第二滚轮352与所述第一滚轮342组成所述管模4的承托件。
99.进一步优选地,所述管模4的外侧面固定环绕有多个凸缘41,各个凸缘41与所述第一滚轮342以及所述第二滚轮352相切,通过转轴32带动所述第一滚轮342从而带动所述管模4转动。
100.进一步的,所述磁性接近开关6固定安装在所述固定座31上。
101.实施例二:
102.如图2所示的一种管模经位定位方法,所述方法包括:
103.步骤s101:将永磁体安装在所述管模靠近轮轴组件的一侧,将磁性接近开关固定安装在轮轴组件上,并使磁性接近开关的中心线与所述永磁体的中心线设置在同一平面
上;
104.具体地,以上设置使得永磁体在磁性接近开关的检测范围内,同时使得所述磁性接近开关检测的距离更加精准。
105.步骤s102:启动电机,电机通过皮带带动轮轴组件从而带动管模转动;
106.步骤s103:管模高速离心完成后,驱动器控制电机减速,在减速过程中,当管模运行频率小于等于预设频率时,磁性接近开关开启。
107.上述所指的预设频率是指管模转动的最低频率,通常为1hz。
108.步骤s104:在管模转动过程中,检测永磁体与磁性接近开关之间的距离,当所述永磁体与磁性接近开关之间的距离小于等于预设阈值时,磁性接近开关发送信号至控制器。
109.具体地,管模每转动一圈时,永磁体与磁性接近开关之间就会存在一次最短距离,在实际调试过程中,因为信号输出需要时间,所以一般会将预设阈值的设置值比最短距离大0.1~0.5mm,通过磁性接近开关检测距离,在所述永磁体与所述磁性接近开关之间的距离小于预设阈值的情形下,磁性接近开关发送信号至控制器。
110.下面以控制器为执行主体,阐述以下步骤:
111.如图3所示,在磁性接近开关发送信号至控制器的步骤之后,包括:
112.步骤s105:接收到磁性接近开关发送的信号后,将驱动器的速度模式切换成位置控制模式;
113.步骤s106:记录当前编码器的脉冲值后,将所述编码器的脉冲值清零;
114.步骤s107:通过预先设定的偏移值确定脉冲偏差值;通过所述脉冲偏差值,确定驱动器的第一输出频率。
115.具体地,假设管模在转动且转动方向为逆时针,永磁体与磁性接近开关之间的距离为预设阈值时,将此时管模的位置记为a点,将管模经位的实际物理位置记为b点,本实施例中的预先设定的偏移值即为管模从a点到b点逆时针转动的位移,此位移是固定不变的,所以根据编码器的脉冲值与位移的换算公式即可通过预先设定的偏移值确定脉冲偏差值,然后根据脉冲的偏差值作为输入量,经过pi调节后,输出结果是对变频器频率调节的值,即为第一输出频率,pi调节是一种线性控制,它根据给定值与实际输出值构成控制偏差,将偏差的比例和积分通过线性组合构成控制量,对被控对象进行控制。本实施例通过pi调节的目的是为了在大惯性的管模转动过程中,减少位置偏差,从而对变频器的输出功率进行限制。
116.如图4所示,通过所述脉冲偏差值,确定驱动器的第一输出频率的步骤之后包括:
117.步骤s108:通过限辐处理,将所述驱动器输出的第一输出频率控制在预设频率以下,得到第二输出频率;
118.具体地,限辐处理是指将信号某种特性(例如电压、电流、功率)超过预定门限值的所有瞬时值减弱至接近此门限值,而对其他所有的瞬时值予以保留的操作;即将第一输出频率控制在预设频率以下,在本实施例中,预设频率通常为1hz。
119.步骤s109:根据所述脉冲偏差值,确定管模停止运动的预设位置;
120.根据以上说明,脉冲偏差值与a点到b点的之间的位移存在对应关系,根据脉冲偏差值,控制器即可确定管模停止运动的预设位置(即为b点)。
121.步骤s110:驱动器根据所述第二输出频率以及管模停止运动的预设位置控制电机
带动管模转动;
122.步骤s111:当管模停止运动的实际位置与所述管模停止运动的预设位置的差值小于预设偏差时,将电机锁轴。
123.预设偏差是指能使行车抓取管模经位的最大偏差。
124.本实施例的管桩经位定位方法,根据磁性接近开关的特性,使得电机减速过程中,管模低速爬行,通过编码器的脉冲偏差值,控制器能准确的判断管模需要滑移的距离;然后利用pi调节,进一步减少了实际误差,使得管模精准的运动到经位,本实施例中的管模经位定位方法不仅可用于管模定位,也可应用其他大惯量的定位场景中,所以本发明的实施例相比于现有的定位方法应用场景更广。
125.上述本发明实施例序号仅仅为了描述,不代表实施例的优劣。
126.以上仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1