一种大面积混凝土地面无缝施工设备及其施工方法与流程
1.本技术涉及混凝土施工的技术领域,尤其是涉及一种大面积混凝土地面无缝施工设备及其施工方法。
背景技术:
2.近年来,随着我国经济的迅速发展,平面尺寸超长、超宽的建筑物在大型公共建筑、工业厂房和商业中心等领域得到了越来越多的应用。而地面是建筑中的重要组成部分,在建筑中主要有分隔空间、保护结构、美化室内环境、满足使用要求等作用。在大面积混凝土地面结构无缝施工中,由于混凝土收缩变形导致混凝土产生裂缝是裂缝形成的主要原因。因此,一方面减小混凝土的收缩,一方面提高混凝土的极限抗拉能力,是防止混凝土出现有害裂缝的关键。
3.相关技术中,在大面积混凝土地面施工时为了防止出现裂缝,一般采用跳仓法进行施工,参照图1,其施工方式为:先根据基础筏板面积大小沿长度和宽度方向用模板分隔为多个边长不大于40m的跳仓块,沿各自方向分别编号为a和b;然后先浇筑第一批跳仓块a,初凝后进行养护,在对跳仓块a浇筑后的7-10天后,再浇筑第二批跳仓块b,初凝后对其进行养护,一段时间后拆模并继续养护,养护后及时对跳仓块之间的间隙进行回填,减少暴露时间。
4.针对上述中的相关技术,发明人认为跳仓法在施工时需要跳跃式的在各个模板搭建好的跳仓块内浇筑混凝土,然而在搭建好的跳仓块内不便于采用推车对混凝土进行运输,而直接采用泵车进行间隔式的泵送浇筑又容易使一个跳仓块内的混凝土堆积在一起,跳仓块内的混凝土分布不均匀会严重影响施工质量,因此一般需要人工担运的方式将混凝土均匀加入每一个跳仓块内,不仅工作量大,而且费时费力,因此,发明人认为,相关技术中进行大面积混凝土地面无缝施工时存在工作效率较低的缺陷。
技术实现要素:
5.为了提高大面积混凝土地面无缝施工时的工作效率,本技术提供一种大面积混凝土地面无缝施工设备及其施工方法。
6.第一方面,本技术提供一种大面积混凝土地面无缝施工设备,采用如下的技术方案:一种大面积混凝土地面无缝施工设备,包括移动组件和下料组件,所述移动组件包括导轨、支撑架和第一驱动件,所述支撑架通过所述第一驱动件与所述导轨滑动连接,所述支撑架的滑动方向与所述导轨的长度方向垂直,所述第一驱动件用于驱动所述支撑架滑动,所述下料组件包括料斗和第二驱动件,所述料斗和所述支撑架滑动连接,所述料斗的滑动方向与所述支撑架的长度方向平行,所述料斗靠近所述支撑架的一侧开设有出料口,所述第二驱动件用于驱动所述料斗滑动。
7.通过采用上述技术方案,施工时,先根据基础筏板面积大小沿长度和宽度方向用
模板分隔为多个边长不大于40m的跳仓块,然后将施工设备移动至基础筏板处,并使得导轨位于基础筏板沿长度方向的两侧,然后启动第二驱动件,第二驱动件带动料斗沿支撑架滑动,从而对料斗在基础筏板宽度方向的位置进行调节,然后启动第一驱动件,第一驱动件带动支撑架沿导轨滑动,支撑架滑动时带动料斗沿基础筏板的长度移动,从而对料斗在基础筏板长度方向的位置进行调节,通过第一驱动件和第二驱动件将料斗移动至跳仓块的正上方,然后在料斗内加入混凝土,接着利用第一驱动件带动料斗沿跳仓块的长度方向滑动,从而将混凝土均匀的浇筑于跳仓块内,当一个跳仓块浇筑完成后,继续利用第一驱动件和第二驱动件对料斗的位置进行调整,使得料斗位于另一待浇筑的跳仓块上方,然后重复上述操作,直至所有跳仓块均被浇筑满混凝土,施工即完成。通过上述设备,第一驱动件带动料斗移动过程中能够将混凝土均匀的浇筑在跳仓块内,有利于保证良好的施工质量,当一个跳仓块浇筑完成后,利用第一驱动件和第二驱动件调整料斗的位置,即可对其他跳仓块进行浇筑,无需采用人工运输的方式将混凝土分别加入每个跳仓块内,不仅降低了工人的劳动强度,而且有效提高了大面积混凝土地面无缝施工时的工作效率。
8.可选的,还包括调节组件,所述调节组件包括调节板和第三驱动件,所述调节板与所述料斗滑动连接,所述调节板用于封堵所述出料口,所述第三驱动件用于驱动所述调节板滑动。
9.通过采用上述技术方案,通过第三驱动件带动调节板滑动能够对出料口进行封堵,从而能够调节出料口的大小,防止浇筑过程中由于出料口较大,导致将混凝土浇筑在相邻的跳仓块内的问题,通过调节板能够使出料口的宽度能够与跳仓块的尺寸相匹配,使得本技术的施工设备能够应用于各种尺寸的跳仓块,有效增强了施工设备的通用性。
10.可选的,所述第三驱动件包括导向杆、双向螺杆和调节电机,所述导向杆与所述料斗侧壁固定连接,所述调节板设有两个,两个所述调节板均滑动连接于导向杆上,所述双向螺杆两端分别和两个调节板螺纹连接,所述调节电机用于驱动所述双向螺杆转动。
11.通过采用上述技术方案,调节出料口大小时,启动调节电机,调节电机带动双向螺杆转动,由于两个调节板与双向螺杆两端分别螺纹连接,并且导向杆对调节板具有导向作用,因此双向螺杆转动时能够带动两个调节板朝向互相靠近或远离的方向移动,调节板滑动时即可调节出料口的宽度,直至出料口的宽度与跳仓块的尺寸匹配,即可进行浇筑作业,上述结构使得出料口的宽度能够适应各种尺寸的跳仓块,从而增强了施工设备的通用性。
12.可选的,所述支撑架底部转动连接有多个滚轮,所述滚轮滚动连接于所述导轨上,所述第一驱动件包括驱动电机和多个传动件,一个所述传动件用于驱动一个所述滚轮转动,所述驱动电机用于驱动多个传动件同时转动。
13.通过采用上述技术方案,浇筑作业时,驱动电机通过传动件带动滚轮转动,滚轮转动时带动支撑架沿导轨的长度方向往复滑动,从而带动料斗移动进行浇筑作业,有利于将混凝土均匀的浇筑在跳仓块内,从而保证良好的施工质量,通过滚轮驱动能够减小支撑架与导轨之间的摩擦力,使得支撑架平稳滑动,从而保证施工设备整体的稳定性。
14.可选的,所述传动件包括主动链轮、从动链轮和链条,所述主动链轮和所述驱动电机的输出轴同轴固定连接,所述从动链轮和所述滚轮同轴固定连接,所述链条张紧套设于所述主动链轮和所述从动链轮上。
15.通过采用上述技术方案,浇筑作业时,驱动电机带动主动链轮转动,主动链轮转动
时通过链条带动从动链轮转动,从动链轮转动时带动滚轮转动,从而带动支撑架移动,驱动电机通过多个传动件能够带动过个滚轮同时转动,从而增强支撑架移动时的灵活性和可控性,同时能够节省动力,有利于降低浇筑作业的施工成本。
16.可选的,所料斗内转动连接有转轴,所述转轴位于所述出料口的上方,所述转轴上设有螺旋设置的叶片,所述料斗侧壁设置有用于驱动转轴转动的下料电机。
17.通过采用上述技术方案,浇筑过程中,下料电机带动转轴转动,转轴转动时带动叶片将料斗内的混凝土通过出料斗拨出,一方面防止出料口被混凝土堵塞,另一方面转轴带动叶片能够对料斗内的混凝土起搅拌的作用,从而防止料斗内的混凝土凝结。
18.可选的,还包括刮料组件,所述刮料组件位于所述出料口一侧,所述刮料组件包括安装座、驱动杆和刮料电机,所述安装座和所述料斗连接,所述驱动杆和所述安装座转动连接,所述刮料电机用于驱动所述驱动杆转动,所述驱动杆上固定连接有多个刮料片,多个所述刮料片沿所述驱动杆周向间隔均匀分布。
19.通过采用上述技术方案,浇筑过程中,启动刮料电机,刮料电机带动驱动杆转动,驱动杆转动时带动刮料片转动,从而将跳仓块内的混凝土刮平,有利于使跳仓块内的浇筑的混凝土保持密实,无需工人后续进行刮平操作,不仅有利于保证良好的施工质量,并且能够提高浇筑作业的施工效率。
20.可选的,所述刮料组件还包括气缸,所述安装座通过所述气缸和所述料斗连接。
21.通过采用上述技术方案,当浇筑作业采用分层浇筑的作业方式时,可以根据每次浇筑的厚度调节驱动杆的位置,调节时通过气缸带动安装座升降,安装座升降时带动驱动杆升降,从而带动刮料片升降,使得刮料片对浇筑的每层混凝土都能进行刮平处理,提高了刮料组件的适用性,有利于提高浇筑时的施工效率。
22.第二方面,本技术提供一种大面积混凝土地面无缝施工方法,采用上述的一种大面积混凝土地面无缝施工设备,包括如下步骤:步骤一:搭建模板,将基础筏板分隔为多个跳仓块,分别编号为a和b;步骤二:安装设备,将大面积混凝土地面无缝施工设备移动至基础筏板上,然后将混凝土加入料斗内;步骤三:调整料斗位置,开启第二驱动件,第二驱动件带动料斗沿支撑架滑动,然后开启第一驱动件,第一驱动件带动支撑架沿导轨滑动,支撑架带动料斗滑动,直至料斗位于跳仓块正上方;步骤四:浇筑,开启第一驱动件,第一驱动件带动料斗移动进行浇筑作业,浇筑作业分层多次进行,每次间隔7-10天,跳仓块内混凝土总厚度为n,浇筑层数为m,每次浇筑作业的浇筑厚度为n/m;步骤五:浇筑完成后进行拆模、养护、并对跳仓块之间的间隙采用混凝土回填。
23.通过采用上述技术方案,采用本技术施工设备能够大量减少人工操作的步骤,因此有效降低了工人的劳动强度,提高了大面积混凝土地面无缝施工时的工作效率。在步骤四浇筑作业时,在跳仓块内采用分层浇筑的作业方式,不仅能够减少大面积混凝土地面纵向开裂的问题,而且还能减少混凝土水平开裂导致地面发生塌陷、隆起、空鼓和缩孔等问题,从而进一步减少了大面积混凝土地面容易产生裂缝的问题,有利于保证大面积混凝土地面施工具有良好的施工质量。
24.可选的,步骤四中浇筑作业包括:s1、在每个跳仓块a内浇筑n/m;s2、所述s1完成后间隔7-10天,然后在跳仓块a和跳仓块b内均浇筑n/m;s3、所述s2完成后间隔7-10天,重复s2,直至跳仓块a和跳仓块b内浇筑总厚度均为n。
25.通过采用上述技术方案,先在跳仓块a内浇筑一层混凝土,7-10天后,同时在跳仓块a和跳仓块b内再次浇筑一层混凝土,重复此操作直至浇筑完成,上述的浇筑方式不仅能够保证分层浇筑的施工质量,并且能够在第一次浇筑之后同时对跳仓块a和跳仓块b进行浇筑,无需等待跳仓块a浇筑的混凝土凝固后再浇筑跳仓块b,因此有效减少了浇筑作业的间隔时间,缩短了施工周期,有利于提高大面积混凝土地面无缝施工时的工作效率。
26.综上所述,本技术包括以下至少一种有益技术效果:1.本技术的施工设备通过第一驱动件和第二驱动件能够对料斗的位置进行调整,一驱动件带动料斗移动过程中能够将混凝土均匀的浇筑在跳仓块内,有利于保证良好的施工质量,当一个跳仓块浇筑完成后,利用第一驱动件和第二驱动件调整料斗的位置,即可对其他跳仓块进行浇筑,无需采用人工运输的方式将混凝土分别加入每个跳仓块内,不仅降低了工人的劳动强度,而且有效提高了大面积混凝土地面无缝施工时的工作效率;2.本技术的施工设备通过第三驱动件带动调节板滑动能够对出料口进行封堵,从而能够调节出料口的大小,使得出料口的宽度能够与跳仓块的尺寸相匹配,使得本技术的施工设备能够应用于各种尺寸的跳仓块,有效增强了施工设备的通用性;3.本技术的施工设备通过将跳仓块内的混凝土刮平,有利于使跳仓块内的浇筑的混凝土保持密实,无需工人后续进行刮平操作,不仅有利于保证良好的施工质量,并且能够提高浇筑作业的施工效率;4.本技术的施工方法在浇筑作业时,在每个跳仓块内采用分层浇筑的作业方式,不仅能够减少大面积混凝土地面纵向开裂的问题,而且还能减少混凝土水平开裂导致地面发生塌陷、隆起、空鼓和缩孔等问题,从而进一步减少了大面积混凝土地面容易产生裂缝的问题,有利于保证大面积混凝土地面施工具有良好的施工质量;5.本技术的施工方法能够在第一次浇筑之后同时对跳仓块a和跳仓块b进行浇筑,无需等待跳仓块a浇筑的混凝土凝固后再浇筑跳仓块b,因此有效减少了浇筑作业的间隔时间,缩短了施工周期,有利于提高大面积混凝土地面无缝施工时的工作效率。
附图说明
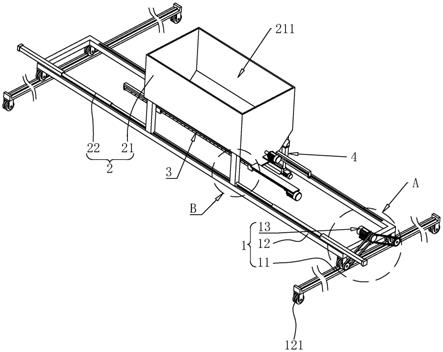
27.图1是本技术实施例中一种大面积混凝土地面无缝施工方法中跳仓块编号方式示意图;图2是本技术实施例中一种大面积混凝土地面无缝施工设备的整体结构示意图;图3是图2中a部分的放大视图;图4是图2中b部分的放大视图;图5是本技术实施例中一种大面积混凝土地面无缝施工设备的料斗、调节组件和刮平组件的结构示意图;图6是本技术实施例中一种大面积混凝土地面无缝施工设备的料斗的结构示意
图。
28.附图标记:1、移动组件;11、导轨;111、行走轮;12、支撑架;121、滚轮;122、滑槽;13、第一驱动件;131、驱动电机;132、传动件;1321、主动链轮;1322、从动链轮;1323、链条;2、下料组件;21、料斗;211、进料口;212、出料口;213、滑杆;2131、滑块;214、转轴;2141、叶片;215、下料电机;216、固定座;217、支撑座;22、第二驱动件;3、调节组件;31、调节板;311、连接块;32、第三驱动件;321、导向杆;322、双向螺杆;323、调节电机;4、刮料组件;41、气缸;42、安装座;43、驱动杆;431、刮料片;44、刮料电机。
具体实施方式
29.以下结合附图1-6对本技术作进一步详细说明。
30.本技术实施例公开一种大面积混凝土地面无缝施工设备。参照图2,一种大面积混凝土地面无缝施工设备包括移动组件1、下料组件2、调节组件3和刮料组件4。
31.参照图2,移动组件1包括导轨11、支撑架12和第一驱动件13,导轨11设有两个,两个导轨11沿长度方向平行设置,导轨11两端的底部转动连接有行走轮111,支撑架12为矩形框状,支撑架12的长度与两个导轨11之间的距离相等,支撑架12靠近导轨11一侧的四个直角处分别转动连接有滚轮121,滚轮121为工字型滚轮121,导轨11为t型导轨11,滚轮121滚动连接于导轨11上,支撑架12通过滚轮121与导轨11滑动连接,支撑架12的滑动方向与导轨11的长度方向垂直。
32.参照图2和图3,第一驱动件13包括驱动电机131和多个传动件132,本实施例中传动件132设有两个,两个传动件132分别与位于支撑架12的一侧的两个滚轮121配合安装,传动件132包括主动链轮1321、从动链轮1322和链条1323,驱动电机131和机壳和支撑架12采用螺丝固定连接,主动链轮1321和驱动电机131的输出轴采用键同轴固定连接,从动链轮1322和滚轮121同轴焊接,链条1323张紧套设于主动链轮1321和从动链轮1322外周。
33.参照图2、图3和图4,下料组件2包括料斗21和第二驱动件22,料斗21为的空心长方体状,料斗21远离支撑架12的一侧开设有进料口211,料斗21靠近支撑架12的一侧开设有宽度逐渐减小的出料口212,料斗21靠近支撑架12的一侧焊接有四个滑杆213,四个滑杆213分别位于料斗21底部的四个边角处,滑杆213远离料斗21的一端焊接有滑块2131,支撑架12上开设有两条滑槽122,滑块2131滑动连接于滑槽122内,料斗21通过滑块2131与支撑架12滑动连接,料斗21的滑动方向与支撑架12的长度方向平行。
34.参照图2、图3和图4,第二驱动件22设有两个,连个驱动件分别位于料斗21沿滑动方向的两端,第二驱动件22为多级气缸41,多级气缸41的缸体和支撑架12支撑架12采用螺丝固定连接,多级气缸41的活塞杆和滑杆213焊接,多级气缸41的伸缩轴线与料斗21的滑动方向平行。位于料斗21两侧的多级气缸41用于驱动料斗21滑动,当一侧的多级气缸伸长时,另一侧的多级气缸收缩,通过两个多级气缸配合降低料斗21滑动过程中的摩擦。
35.参照图5和图6,料斗21内设有转轴214,转轴214的轴向与料斗21的长度方向平行,转轴214位于出料口212正上方,转轴214两端分别与料斗21内壁转动连接,转轴214一端延伸至料斗21外,料斗21侧壁设有下料电机215,下料电机215的机壳和料斗21侧壁采用螺丝固定连接,下料电机215的输出轴和转轴214延伸至料斗21外的一端采用键同轴固定连接。转轴214上沿焊接有两段沿转轴214轴向螺旋设置的叶片2141,两段叶片2141的旋向相反。
36.参照图4、图5和图6,调节组件3包括调节板31和第三驱动件32,调节板31设有两个,两个调节板31位于料斗21的出料口212处,调节板31纵截面呈u型,调节板31上焊接有两个连接块311。
37.参照图4、图5和图6,第三驱动件32包括导向杆321、双向螺杆322和调节电机323,料斗21沿长度方向两端的侧壁上焊接有固定座216,导向杆321两端分别与固定座216焊接,导向杆321的轴向与料斗21的长度方向平行,导向杆321穿设于两个调节板31位于同一侧的连接块311内,调节板31通过连接块311滑动连接于导向杆321上,双向螺杆322位于调节板31远离导向杆321的一侧,双向螺杆322两端分别与两个调节板31的连接块311螺纹连接,料斗21侧壁焊接有支撑座217,调节电机323的机壳和支撑座217采用螺丝固定连接,调节电机323的输出轴和双向螺杆322采用键同轴固定连接。
38.参照图4、图5和图6,刮料组件4位于出料口212的一侧,刮料组件4包括气缸41、安装座42、驱动杆43和刮料电机44,气缸41设有两个,两个气缸41位于料斗21沿长度方向的两端,安装座42设有两个,一个安装座42和一个气缸41配合安装,气缸41和缸体和料斗21侧壁采用螺丝固定连接,安装座42和气缸41和活塞杆焊接,驱动杆43两端分别和两个安装座42转动连接,驱动杆43的转动轴线与料斗21的长度方向平行。
39.参照图4、图5和图6,驱动杆43上设有多个刮料片431,本实施例中刮料片431设置有三个,三个刮料片431沿驱动杆43周向间隔均匀分布,刮料片431与驱动轴焊接,刮料片431的长度与驱动杆43的长度相等,刮料片431的长度方向与驱动杆43的轴线方向平行,刮料片431朝向远离驱动杆43的一端设置为弧形。
40.本技术实施例一种大面积混凝土地面无缝施工设备的实施原理为:施工时,先根据基础筏板面积大小沿长度和宽度方向用模板分隔为多个边长不大于40m的跳仓块,然后将施工设备通过行走轮111移动至基础筏板处,并使得导轨11位于基础筏板沿长度方向的两侧。
41.然后启动第二驱动件22,第二驱动件22带动料斗21沿支撑架12滑动,从而对料斗21在基础筏板宽度方向的位置进行调节,然后启动第一驱动件13,第一驱动件13带动支撑架12沿导轨11滑动,支撑架12滑动时带动料斗21沿基础筏板的长度移动,从而对料斗21在基础筏板长度方向的位置进行调节,通过第一驱动件13和第二驱动件22将料斗21移动至跳仓块的正上方,并使得导轨11位于基础筏板沿长度方向的两侧,然后根据跳仓块的尺寸调节出料口212的大小。
42.调节出料口212大小时,启动调节电机323,调节电机323带动双向螺杆322转动,双向螺杆322转动时能够带动两个调节板31朝向互相靠近或远离的方向移动,调节板31滑动时即可调节出料口212的宽度,直至出料口212的宽度与跳仓块的尺寸匹配,即可进行浇筑作业。
43.浇筑作业时,驱动电机131通过传动件132带动滚轮121转动,滚轮121转动时带动支撑架12沿导轨11的长度方向往复滑动,从而带动料斗21移动进行浇筑作业,有利于将混凝土均匀的浇筑在跳仓块内,浇筑过程中,启动刮料电机44,刮料电机44带动驱动杆43转动,驱动杆43转动时带动刮料片431转动,从而将跳仓块内的混凝土刮平,浇筑时分多次进行,每次浇筑一层后间隔7-10天再浇筑下一层,直至跳仓块内的混凝土厚度符合施工要求,即完成施工。
44.本技术实施例还公开一种大面积混凝土地面无缝施工方法,采用上述的大面积混凝土地面无缝施工设备,包括以下步骤:步骤一:搭建模板,将基础筏板分隔为多个跳仓块,分别编号为a和b,编号方式参照图1;步骤二:安装设备,将大面积混凝土地面无缝施工设备移动至基础筏板上,并使得导轨11位于基础筏板沿长度方向的两侧,然后将混凝土加入料斗21内;步骤三:调整料斗21位置,开启第二驱动件22,第二驱动件22带动料斗21沿支撑架12滑动,然后开启驱动电机131,驱动电机131通过传动件132带动滚轮121转动,滚轮121带动支撑架12沿导轨11滑动,支撑架12带动料斗21滑动,直至料斗21位于跳仓块a的正上方;步骤四:浇筑,开启驱动电机131,驱动电机131带动料斗21移动进行浇筑作业,浇筑作业分多次进行,每次间隔7-10天;本实施例中施工要求跳仓块内混凝土总厚度为40cm,浇筑层数为2次,每次浇筑作业的浇筑厚度为20cm,浇筑作业包括:s1、在每个跳仓块a内浇筑20cm厚的混凝土层;s2、所述s1完成后间隔7-10天,然后在跳仓块a和跳仓块b内均浇筑20cm厚的混凝土层;s3、所述s2完成后间隔7-10天,然后在跳仓块b内均浇筑20cm厚的混凝土层,即浇筑完成;步骤五:浇筑完成后进行拆模、养护、并对跳仓块之间的间隙采用混凝土回填。
45.本技术实施例一种大面积混凝土地面无缝施工方法的实施原理为:在步骤四浇筑作业时,在跳仓块内采用分层浇筑的作业方式,不仅能够减少大面积混凝土地面纵向开裂的问题,而且还能减少混凝土水平开裂导致地面发生塌陷、隆起、空鼓和缩孔等问题,从而进一步减少了大面积混凝土地面容易产生裂缝的问题,有利于保证大面积混凝土地面施工具有良好的施工质量。本技术的施工方法的浇筑方式为先在跳仓块a内浇筑一层混凝土,7-10天后,同时在跳仓块a和跳仓块b内再次浇筑一层混凝土,重复此操作直至浇筑完成,上述的浇筑方式不仅能够保证分层浇筑的施工质量,并且能够在第一次浇筑之后同时对跳仓块a和跳仓块b进行浇筑,无需等待跳仓块a浇筑的混凝土凝固后再浇筑跳仓块b,因此有效减少了浇筑作业的间隔时间,缩短了施工周期,有利于提高大面积混凝土地面无缝施工时的工作效率。
46.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1