AGV双臂扣齿式搬运机的制作方法
agv双臂扣齿式搬运机
技术领域
1.本发明涉及智能停车技术领域,尤其涉及一种agv双臂扣齿式搬运机。
背景技术:
2.当前国内外机械立体车库停车设备技术现状和优缺点如下:半自动化机械设备,存在智能性能不高,机械结构笨重,运输、施工安装不方便,维护和运营成本高。现有的全自动化分两种:双臂抱轮和梳齿托举式,抱轮和托举方式,对停车要求较高,同时对汽车轮胎都有不同程度的损伤。双臂夹持抱轮方式优点:搬运小车超薄,全机电动作,智能化程度高。缺点:对车库环境和安装条件要求非常高,增加了施工难度建设成本高,设备机电动作多而且复杂,故障率高,操作人员和维修人员要有一定的技术水平,运营和维护成本较高,车距受限。梳齿托举式优点:机械原理托举较成熟性能稳定,缺点搬运设备电机功率大,设备较高,相应停车平台较高,增大了车库建造成本。
技术实现要素:
3.本发明的目的在于克服现有技术的不足,适应现实需要,提供一种结构设计新颖、紧凑、易于实施、操作简单的agv双臂扣齿式搬运机。
4.为了实现本发明的目的,本发明所采用的技术方案为:
5.设计一种agv双臂扣齿式搬运机,包括可直线运动的平移小车;还包括可承载车辆四个车轮的平移托板,平移托板底部设有可滚动的滚轮,所述平移小车上设有可与所述平移托板锁止的插合固定装置,所述平移小车通过插合固定装置与平移托板连为一体且通过所述平移小车的移动可带动所述平移托板做前后移动。
6.所述平移托板包括两个通过连杆连为一体的两个平移板,两个所述平移板下方分别设有若干个所述滚轮。
7.所述平移小车包括车架、安装于车架前后两端的移动轮,所述移动轮通过减速机与驱动电机连接,所述插合固定装置为至少一个并安装于所述车架上;所述车架的四个角处分别安装有导向轮。
8.所述插合固定装置包括两个可向车架左右两侧伸出或收回并分别设置于车架两侧的两个插臂,与所述两个插臂相向设置的两个平移板的侧壁上分别开设有插孔,当两个插臂同步伸出或收回时可分别插入至两个平移板上的插孔内或从插孔内伸出。
9.还包括驱动同一插合固定装置中的两个插臂同步伸出或收回的驱动机构,所述驱动机构包括左右设置的两个导向板、位于同一导向板内并可反向同步移动的导向杆,同一车架侧部的两个导向板内的两个导向杆端部通过连板连接,所述插臂固定于所述连板上;还包括位于两个导向板中部的驱动齿、套在驱动齿上的导向件,所述导向件上开设有两个通孔,两个通孔内分别滑动安装有两个齿带,两个齿带位于所述驱动齿的两侧并均与所述驱动齿啮合传动,且两个齿带的延伸端分别向车架的两侧延伸并分别与车架两侧的连板连接并促使两个连板及两个插臂同步伸出或收回;
10.同一所述导向板上设有两个滑槽,两个滑槽上下平行设置,且位于同一导向板上的两个导向杆分别位于两个滑槽内。
11.位于所述平移板下方的平移板上设有插槽,当所述插臂通过插孔进入至平移板下方时可进入至插槽内卡合。
12.两个所述平移板的前端设有向下凹陷的弧形卡槽,车辆前轮可进入至所述弧形卡槽内。
13.所述插臂包括三个插杆,三个插杆呈弧形设置,所述插孔及所述插槽位于所述弧形卡槽的下方。
14.两个所述平移板上分别设有可与地面或承载平台固定的锁止机构;所述锁止机构包括固定于承载平台或地面上卡环、l形锁止杆,所述l形锁止杆位于平移板下方且转折部铰接于所述平移板上,还包括一端连接于平移板上的弹簧,所述l形锁止杆的内端部通过与弹簧连接,所述弹簧促使所述l形锁止杆以转折部为转动点并促使l形锁止杆的外端部进入至所述卡环内将所述平移板与所述地面或承载平台固定,所述l形锁止杆的内端部位于所述插槽的外部,当所述插臂伸入至平移板内部时,位于所述插槽外部的其中一个所述插杆抵在所述l形锁止杆的内端部上并促使所述l形锁止杆的外端部从所述卡环内移出将所述平移板与所述地面或承载平台解除固定。
15.位于车架前侧的所述插合固定装置安装于一底板上,所述底板的尾端与车架铰接,所述车架的前端设有电动顶杆,所述电动顶杆的顶升杆抵在所述底板前端并可促使底板前端抬升,所述弧形卡槽的底部开设有与所述插杆数目相同的缺口,位于此底板上的所述插合固定装置中的插杆一一对应的位于所述缺口下方,且当所述底板前端向上顶升时所述插杆从所述缺口内抬升并托起所述车轮。
16.本发明的有益效果在于:
17.1、本设计其结构设计新颖、紧凑可制作为超薄设备,具有小体积大力气,适合各种由于空间高度受限的立体停车库等优点。
18.2、本设计超大载力不限车距,只要符合停车台核定尺寸参数,可适合各种类型的车距和重量。
19.3、高安全、高性能、低故障,车辆以平迤方式,对车辆不造成任何损伤,采用巧妙的机械结构原理,设备简洁美观,易控制易操作,载车平移托板采用n多的静音万向轮(滚轮),利用机械外动力,无需机电动作,避免受机电通讯之间的信号和人为的不当操作带来的故障,又省电,降低了运营和设备维护费用。
20.4、本设计可采用停取车全自动化,无人值守,可通过远程操作控制管理,智能程度高。
附图说明
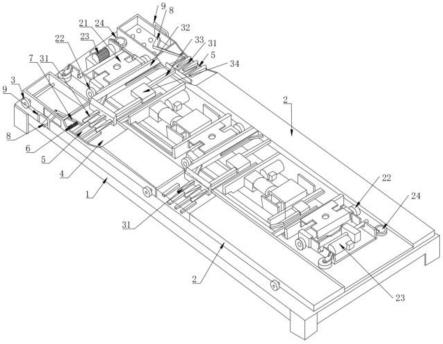
21.图1为本设计的主要结构示意图;
22.图2为本设计中的平移小车主要结构示意图;
23.图3为本设计中局部结构示意图;
24.图4为本设计中的驱动机构俯视状态下的结构示意图;
25.图5为本设计中的导向板结构示意图;
26.图6为本设计中的局部平移板及其上的弧形卡槽结构示意图;
27.图7为本设计中的插合固定装置安装于底板上并与电动顶杆配合后的端部方向下的结构示意图;
28.图8为本设计中的插合固定装置安装于底板上并与电动顶杆配合后的侧部方向下的结构示意图;
29.图9为实施例2所示结构示意图。
具体实施方式
30.下面结合附图和实施例对本发明进一步说明:
31.实施例1:一种agv双臂扣齿式搬运机,参见图1至图8。
32.它包括可直线运动的平移小车,还包括可承载车辆四个车轮的平移托板,平移托板底部设有可滚动的滚轮3,所述平移小车上设有可与所述平移托板锁止的插合固定装置,所述平移小车通过插合固定装置与平移托板连为一体且通过所述平移小车的移动可带动所述平移托板做前后移动。
33.具体来说,本设计中的所述平移托板包括两个通过连杆连为一体的两个平移板2,两个所述平移板2下方分别设有若干个所述滚轮3,所述两个平移板2可通过底部的滚轮在地面或承载平台1上移动。
34.具体来说,所述平移小车包括车架21、安装于车架21前后两端的移动轮22,所述移动轮22通过减速机与驱动电机23连接,平移小车通过移动轮22做前后移动,同时,本设计还在所述车架的四个角处分别安装有导向轮24,导向轮可防止车架侧壁与两个平移板内壁发生碰撞,同时起到引导导向及限位的作用。
35.本设计中,其所述插合固定装置为一个或两个并安装于所述车架上,当为两个时可分别安装于车架的前后两端,为便于说明,本实施例以其中一个插合固定装置为例进行说明,具体如下:
36.所述插合固定装置包括两个可向车架21左右两侧伸出或收回并分别设置于车架21两侧的两个插臂,与所述两个插臂相向设置的两个平移板2的侧壁上分别开设有插孔,当两个插臂同步伸出或收回时可分别插入至两个平移板2上的插孔内或从插孔内伸出,同时本设计还在位于所述平移板2下方的平移板上设有插槽5,当所述插臂通过插孔进入至平移板下方时可进入至插槽内卡合。本设计中,两个所述平移板的前端设有向下凹陷的弧形卡槽4,车辆前轮可进入至所述弧形卡槽4内,所述插臂包括三个插杆31,三个插杆31呈弧形设置,所述插孔及所述插槽位于所述弧形卡槽4的下方。
37.进一步的,本设计它还包括驱动同一插合固定装置中的两个插臂同步伸出或收回的驱动机构,其所述驱动机构包括左右设置的两个导向板32、位于同一导向板32内并可反向同步移动的导向杆36,同一车架21侧部的两个导向板32内的两个导向杆36端部通过连板35连接,所述插臂31固定于所述连板上35;同一所述导向板32上设有两个滑槽38,两个滑槽38上下平行设置,且位于同一导向板上的两个导向杆36分别位于两个滑槽38 内并实现相互隔离。
38.进一步的,它还包括位于两个导向板32中部的驱动齿37、套在驱动齿37上的导向件 34,导向件34固定设置于底板上,所述导向件34上开设有两个通孔,两个通孔内分别滑
动安装有两个齿带33,两个齿带33位于所述驱动齿37的两侧并均与所述驱动齿啮合传动,且两个齿带的延伸端分别向车架21的两侧延伸并分别与车架21两侧的连板35连接并促使两个连板35及两个插臂同步伸出或收回。
39.进一步的,本设计还在两个所述平移板2上分别设有可与地面或承载平台固定的锁止机构;所述锁止机构包括固定于承载平台或地面上卡环9、l形锁止杆7,所述l形锁止杆 7位于平移板2下方且转折部铰接于所述平移板上,还包括一端连接于平移板2上的弹簧 6,所述l形锁止杆7的内端部通过与弹簧连接,其所述弹簧促使所述l形锁止杆以转折部为转动点并促使l形锁止杆的外端部8进入至所述卡环9内将所述平移板与所述地面或承载平台固定,此时,所述l形锁止杆7的内端部位于所述插槽5的侧部,而当所述插臂伸入至平移板内部时,位于所述插槽5外部的其中一个所述插杆31抵在所述l形锁止杆的内端部上并促使所述l形锁止杆的外端部8从所述卡环9内移出将所述平移板与所述地面或承载平台解除固定。
40.进一步的,本设计中,位于车架21前侧的所述插合固定装置安装于一底板39上,所述底板39的尾端通过转动轴41与车架21铰接,所述车架21的前端设有电动顶杆40,所述电动顶杆40的顶升杆抵在所述底板39前端并可促使底板39前端抬升,同时,所述弧形卡槽4的底部开设有与所述插杆数目相同的缺口11,位于此底板39上的所述插合固定装置中的插杆31一一对应的位于所述缺口11下方,且当所述底板39前端向上顶升时所述插杆31从所述缺口11内抬升并托起所述车轮。
41.本设计的agv双臂扣齿式搬运机其初始状态如图1所示,此时,平移小车位于两个平移板之间,此时,车架两侧的插臂处于收缩状态,即插杆从平移板下方收回,此时,所述弹簧促使所述l形锁止杆以转折部为转动点并促使l形锁止杆的外端部8进入至所述卡环 9内将所述平移板与所述承载平台固定。
42.当车辆进入时,车辆两侧的车轮进入至两个平移板上(两个平移板的宽度大于60cm, 以满足不同轮距的车辆),车辆前轮行驶至两个平移板前端的弧形卡槽内即停车,此时,车辆的两个后轮亦位于两个平移板上。
43.而后开始平移车辆,此时,承载平台1通过横向平移及高度平移机构(现有技术,承载平台安装于横向平移及高度平移机构上)进行高度的提升及左右位置的偏移,当承载平台移动至指定车位的端部时,驱动机构中的电机带动驱动齿转动并驱动两侧的导向杆及齿带同步伸出。
44.当导向板连通插臂伸出时,插臂进入至平移板下方的插孔内并进一步进入至插槽中,插槽可对插杆进行限位并提供前后运动时的阻力,此时,位于所述插槽5外部的其中一个所述插杆31抵在所述l形锁止杆的内端部上并促使所述l形锁止杆的外端部8从所述卡环9内移出并通过平移板侧壁上的开口10进入至平移板内部,通过此方式将所述平移板与所述承载平台解除固定。
45.而后,偏移小车通过驱动电机移动,偏移小车移动时通过插杆与平移板的相对固定并带动平移板及底部的滚轮向前移动至车位上,当移动至车位上时,驱动机构带动两个插臂收回并解除移动小车与平移板的相对固定,此时,插杆与所述l形锁止杆的内端部分离,此时,其所述弹簧促使所述l形锁止杆以转折部为转动点并促使l形锁止杆的外端部8进入至所述卡环(此卡环位于车位上)内将所述平移板与车位处地面固定,而后平移小车再次
移动至承载平台上。
46.此后承载平台通过横向平移及高度平移机构运动至空余车位处,此后移动小车移动将空于车位(未停有车辆)上的平移托板移动至承载平台上并通过锁止机构将其固定,而后等待下一车辆的驶入。
47.如此,通过上述过程即可完成移动车辆的目的。
48.如需取车时,其移动小车重复上述操作将平移板运输至承载平台上,此后其所述弹簧促使所述l形锁止杆以转折部为转动点并促使l形锁止杆的外端部8进入至所述卡环9内将所述平移板与所述承载平台固定,而后电动顶杆40的顶升杆抵在所述底板39前端并可将底板39前端抬升,此时整个插合固定装置及侧部的插杆一同抬升,此时,位于此底板 39上的所述插合固定装置中的插杆31一一对应的位于所述缺口11下方并向上抬升并托起所述车轮至车轮底部与平移板平面处于同一高度或略低于平移板平面,此后驾驶人可较为方便的将车辆开出,避免了弧形卡槽深度大导致不易移出的问题发生。
49.实施例2,本实施例在实施例1的方案基础上进行改进设计,其具体为:
50.参见图9所示,其各平移板两端的所述滚轮3通过连接轴311连接(位于平移板同一端上的两个滚轮),本设计在两个平移板的下方分别设有一辅助刹车装置,该辅助刹车装置包括分别位于两个平移板两端连接轴311下侧的弧形板,与连接轴相对的弧形板内侧壁上设有刹车片,与所述刹车片相对的连接轴上安装有刹车轮316,所述刹车片可与所述刹车轮接触实现对滚轮的刹车;同时,还包括将两个弧形板连接的连杆317,位于两个连接轴侧部的平移板底部分别设有向下延伸的导向杆313,所述导向杆贯穿所述连杆上的穿孔,且连杆可相对所述导向杆上下滑动,还包括套在所述导向杆313上的拉力弹簧314,所述拉力弹簧314对所述连杆317施加拉力并促使刹车片抱紧在刹车轮上实现对滚轮的刹车;本实施中其所述插杆31的下侧呈三角形或插杆31的下侧面为斜面、或插杆31的下侧连接有三角形的压板,与连杆接触的压板下端面为斜面。
51.当所述插杆31未进入平移板下方时,其l形锁止杆的外端部进入至卡环9内,此时,拉力弹簧314对所述连杆317施加拉力并促使刹车片抱紧在刹车轮上实现对滚轮的刹车;当需要对平移板移动时,也即当所述插杆31向平移板内插入时,插杆31伸出时,插杆下侧的斜面或压板的下端挤压连杆并同时抵在l形锁止杆内端部上,实现将l形锁止杆的的外端部8从所述卡环9内移出并通过平移板侧壁上的开口10进入至平移板内部,同时促使连杆及两端连接的弧形板及刹车片与刹车轮解除刹车状态,通过此方式将所述平移板与所述承载平台解除固定,而后即可对平移板进行移动。
52.本发明实施例公布的是较佳的实施例,但并不局限于此,本领域的普通技术人员,极易根据上述实施例,领会本发明的精神,并做出不同的引申和变化,但只要不脱离本发明的精神,都在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1