一种瓷砖智能铺贴机器人的制作方法
1.本实用新型涉及一种瓷砖智能铺贴机器人。
背景技术:
2.在当今建筑行业高速发展的大背景下,建筑装修技术领域用工成本大量增加,装修要求和安装需求也与日俱增,利用机器人技术实现少人化、无人化装修是一种发展趋势。智能化机器人的全面开发已经深入到了建筑领域当中,该领域也是相关开发研究工作的重点领域。在各类建筑空间当中,往往存在很多需要铺贴大型瓷砖的地面以及壁面等,比如大型商场、游泳池以及工作间等。自动贴瓷砖机器人的出现,可以缓解相应劳动压力,节约经济成本。
3.目前,传统的瓷砖铺贴作业主要依靠手工操作和一些辅助性器械来完成,耗时耗力,且人工成本极高。
技术实现要素:
4.本实用新型的目的是提供一种瓷砖智能铺贴机器人。
5.上述的目的通过以下的技术方案实现:
6.一种瓷砖智能铺贴机器人,其组成包括:机械臂机构、真空机构和自动行走小车,所述的自动行走小车的上方通过一组螺栓组件与所述的机械臂机构的基座固定连接,所述的基座通过立柱与机械臂连接,所述的所述的机械臂机构的端部与所述的真空机构转动连接,所述的自动行走小车的壳体上与取砖支架固定连接,所述的取砖支架的一侧安装有agv控制箱和机械臂机构控制箱,且所述的机械臂机构控制箱放置在所述的自动行走小车的上方,所述的自动行走小车的后端安装有电源系统,所述的自动行走小车、所述的机械臂机构和所述的真空机构为一体结构组成瓷砖智能铺贴机器人,所述的行走小车内安装有控制平台及通讯系统,作为控制及数据采集系统。
7.所述的瓷砖智能铺贴机器人,所述的机械臂机构由腰关节、大臂、小臂、腕关节和手部组成,所述的腰关节与大臂一端连接,大臂的另一端与小臂的一端连接,小臂的另一端与手部连接。
8.所述的瓷砖智能铺贴机器人,所述的真空机构由铝盘、一组真空吸盘和柱形安装架组成,一组所述的真空吸盘与所述的铝盘固定连接,所述的柱形安装架与所述的铝盘的中间位置连接。
9.所述的瓷砖智能铺贴机器人,所述的自动行走小车由舵轮和全向轮组成,通过所述的舵轮和所述的全向轮组成双舵轮移动驱动结构。
10.本实用新型所达到的有益效果是:
11.1.本实用新型瓷砖自动铺贴机器人上带有激光雷达及避障系统,能够实现自主导航,通过控制平台控制机器人到达指定地点,然后通过的机械臂上刮刀实现刮沟及喷浆,控制真空吸盘抓取瓷砖,通过视觉、高精度测距传感器及水平传感器等,将瓷砖铺到指定位
置;然后通过视觉识别功能准确的找到定位,能够精准的找到瓷砖铺贴的位置,使作业精度达到施工需求。高频振动及减震系统既可以安装瓷砖铺贴对垫层沉降度和密实度的要求,又可以减少高频振动对机械臂和传感器的损坏。准确的配合瓷砖自动抹灰机器人以及运料机器人实现瓷砖的全自动化铺贴。它包括瓷砖自动铺贴机器人的外形尺寸:1200*700*1700(长*宽*高),能前进、倒退、左、右、拐弯及原地转轮,负载500kg。
12.3.本实用新型属于建筑安装机械装置,其组成主要包括行走小车、六轴机械臂、视觉定位系统、高精度激光测距系统、车体稳定支撑系统、数据通讯服务器系统、高频振动及减震系统、真空吸盘系统、控制平台等组成。大型瓷砖智能铺贴机器人整合了若干现有成熟的设计及技术,解决了大型瓷砖人力铺设弊端,减少施工安装人员工作强度及劳动压力,极大的加快了施工进度,节约经济成本。大型瓷砖智能铺贴机器人严格按照标准化、规范化、流程化安装作业,保证了施工质量,达到了施工过程中的环保要求。
13.4.本实用新型应用于建筑装修领域,尤其对大型瓷砖如800*800、600*600等瓷砖铺贴技术,是一种大型瓷砖自动铺贴机器人方法及相应的机器人技术。同时,通过对真空吸盘尺寸的更换,也可对小型瓷砖进行铺贴。
14.5.本实用新型利用视觉的定位、高精度激光测距、水平传感器以及计算机编程能够使得机器人快速通过真空吸盘进行瓷砖的抓取和铺设;铺贴机器人采用六轴工业机械臂进行地砖的抓取和铺贴,具有响应时间段,动作迅速,速度快,精确度高,质量受影响较小,机器人在运转过程中不停顿,不休息,提高自动化生产效率,大型瓷砖智能铺贴机器人代替人工在高危,从繁重的体力劳动中解放出来。在铺设时配合高频振动及持续按压力能够提高瓷砖铺贴的作业精度和效率,达到人工铺设瓷砖的效果,减少现场施工人员的数量,避免了安全事故的发生几率,减少施工总体成本。
15.6.本实用新型具有以下优点:更高的瓷砖铺贴效率,并且不会随着时间的增加而产生效率下降的现象;使用视觉、传感器以及高精度算法替代人眼和测量工具,对瓷砖的空间位置进行实时调整,从而达到更高的瓷砖铺贴精度;替代人工处于恶劣施工环境中,减轻人工劳动强度,保障施工人员的安全健康,提升工作品质;通过合理的运动规划和精细化作业优化瓷砖铺贴效果,增强铺贴成功率,减少建筑材料的浪费,降低建筑成本。
16.7.本实用新型利用agv小车与机械臂组合,通过与自动抹灰机器人,瓷砖自动铺贴的原料运输机器人合作,瓷砖自动铺贴机器人能够在大空间进行自动化瓷砖铺设,大大降低了操作人员的数量,具有效率高,成本低的优点。适用于缺少劳务人员、或者工期短的建筑市场的需要,全程仅需要2-3人即可完成整个建筑的快速、准确装修,工期短,质量好,无材料浪费。
附图说明
17.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
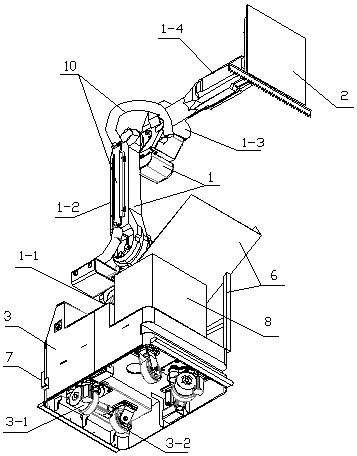
18.附图1是本实用新型的结构示意图;
19.附图2是附图1的主视图;
20.附图3是附图1的俯视图;
21.附图4是附图1的左视图;
22.图中:1、机械臂机构,2、真空机构,3、自动行走小车,4、基座,5、立柱,6、取砖支架,7、agv控制箱,8、机械臂机构控制箱,9、避障系统,10、电缆、气管穿线及保护套,11、真空泵,1-1、腰关节,1-2、大臂,1-3、小臂,1-4、腕关节,1-5、手部,2-1、铝盘,2-2、真空吸盘,2-3、柱形安装架,3-1、舵轮,3-2、全向轮。
具体实施方式
23.以下结合附图对本实用新型的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本实用新型,并不用于限定本实用新型。
24.实施例1:
25.一种瓷砖智能铺贴机器人,其组成包括:机械臂机构1、真空机构2和自动行走小车3,所述的自动行走小车的上方通过一组螺栓组件与所述的机械臂机构的基座4固定连接,所述的基座通过立柱5与机械臂连接,所述的所述的机械臂机构的端部与所述的真空机构转动连接,所述的自动行走小车的壳体上与取砖支架6固定连接,所述的取砖支架的一侧安装有agv控制箱7和机械臂机构控制箱8,且所述的机械臂机构控制箱放置在所述的自动行走小车的上方,所述的自动行走小车的后端安装有电源系统,所述的自动行走小车、所述的机械臂机构和所述的真空机构为一体结构组成瓷砖智能铺贴机器人,所述的行走小车内安装有控制平台及通讯系统,作为控制及数据采集系统。
26.实施例2:
27.根据实施例1所述的瓷砖智能铺贴机器人,所述的机械臂机构由腰关节1-1、大臂1-2、小臂1-3、腕关节1-4和手部1-5组成,所述的腰关节与大臂一端连接,大臂的另一端与小臂的一端连接,小臂的另一端与手部连接,所述的机械臂组件上还连接有真空泵机械臂组件为六轴机械臂,且所述的机械臂组件上连接有电缆、气管穿线及保护套,其中气管穿线与真空泵连接,电缆、气管穿线及保护套与手臂控制箱连接。
28.实施例3:
29.根据实施例1所述的瓷砖智能铺贴机器人,所述的真空机构由铝盘2-1、一组真空吸盘2-2和柱形安装架2-3组成,一组所述的真空吸盘与所述的铝盘固定连接,所述的柱形安装架与所述的铝盘的中间位置连接;其中真空机构的铝盘上分别连接有真空泄压电磁阀、真空开关、水平传感器、视觉传感器和高精度激光测距传感器,铝盘的下方连接有刮刀及喷头,所述的铝盘的外侧安装有高频振动电机。
30.实施例4:
31.根据实施例1或2或3所述的用于铺砖机器人的机械臂,所述的自动行走小车由舵轮3-1和全向轮3-2组成,通过所述的舵轮和所述的全向轮组成双舵轮移动驱动结构。自动行走小车底部连接有车体稳定支撑系统,自动行走小车的控制平台放置区安装有激光导航装置,激光导航装置包括一组点激光测头,自动行走小车避障系统安装孔内安装有避障系统9,自动行走小车头部和尾部分别连接有条形结构的碰撞开关。
32.实施例5:
33.采用点激光使机器人带动点激光测头在空间中划过固定轨迹,由点激光传感器信号值的变化可以得到房间的几何尺寸和小车的位置信息,从而计算出待铺瓷砖的位置。同时配合避障系统是机器人在行走过程中,通过传感器感知到在其规划路线上存在静态或者
动态障碍物时,按照一定的算法实时更新路径,绕过障碍物,最后达到目的。该技术具有较高精度,并且几乎不受光照条件的影响,能在黑暗环境中很好地使用,成本低、效率高、算法简单等优点,同时保证人员和机器人行走的安全性。
34.agv小车能驱动机器人实现全方位移动,agv小车采用双舵轮移动驱动方式,两台舵轮安装在车的对角线位置,通过调整两个舵轮的角度及速度,可以使小车在不转动车头的情况下实现变道、转向、原地转轮等动作,甚至可以实现沿任意点为半径的转弯运动,具有很强的灵活性。可以轻松实现横向移动和转弯半径为零的原地转向运动等,能很好地适用于空间狭小的房间的瓷砖铺贴。同时,agv自动循迹小车配合人机交互单元,信号接收与传输数据单元,导航与避障系统可以躲避障碍物,防止碰撞事故的发生。
35.实施例6:
36.多种混合传感器数据通讯与解析,各种传感器如高精度激光测距传感器、水平传感器、agv自动循迹小车、机械臂、视觉等,为保证数据的传输精度及速率,都采用通讯的方式进行数据传输,而各个厂家设备都采用不同的通讯方式和通讯接口,如rs485、rs232、ttl、以太网通讯协议等。利用plc丰富的串行通讯方式,支持多种通信协议,如点对点接口协议(ppi协议)、多点接口协议(mpi协议)、和profinet协议以及自由口通讯协议等,可实现多种数据的采集和处理,通信效率高,开发周期短、通讯稳定等优点。
37.线激光和机器视觉融合技术提高机器人铺砖精度。在机器人视觉的基础上增加了线激光发射器,将线激光而非瓷砖表面作为瓷砖方位参考物,从而避免瓷砖表面的反光以及花纹所可能带来的机器视觉的误检测。具体实现方法为:将线激光以固定入射角照射到相邻瓷砖的缝隙中,再通过机器视觉来识别每段缝隙中线激光的长度、方向和位置,从而确定待铺瓷砖的实时位置以及最终的铺贴位置。使用该技术可以在瓷砖铺贴时达到0.2mm的线性精度以及0.1
°
的角度精度。
38.高频振动及持续下按力配合使用提高瓷砖铺贴效果,模拟人工用橡皮锤敲实的铺砖方式,对瓷砖进行找水平及夯实的作用。由于机器人采用敲击的方式不能保证瓷砖水平,同时机械臂最大下按力不能超过机械臂最大力矩。因此我们采用高频振动电机及机械臂持续下按力结合方式,保证砖的铺砖水平度及垫层对的夯实效果。
39.实施例7:
40.工作原理:
41.(1)大型瓷砖智能铺贴机器人需要配合自动铺垫层机器人协同运行才能发挥其最大效率,自动铺垫层机器人提前铺好一排垫层,瓷砖智能铺贴机器人在铺好垫层下一排运行,可同时交叉作业,最大提高铺砖效率。
42.(2)大型瓷砖智能铺贴机器人通过agv自动循迹小车到达指定坐标,小车四角外侧电缸伸出地面进行支撑,保持设备本体稳定不晃动。
43.(3)机械臂由初始位置调整到作业状态;机械臂伸出寻找前一块地砖位置,通过视觉摄像头、高精度激光测距仪以及水平传感器确定下一块砖铺设位置,同时机械臂能够操控刮刀进行地面的刮沟及喷浆作业。
44.(4)刮沟及喷浆作业完成后,机械臂调整到移动平台后端,进行取砖动作。
45.(5)机械臂旋转位置至移动平台后端,通过视觉摄像头、高精度激光测距仪以及水平传感器进行校正确定取砖位置。
46.(6)机械臂校正完毕后,垂直下降到瓷砖位置控制真空吸盘通过气缸(空气压缩装置)实现对瓷砖的抓取。
47.(7)机器臂抓取瓷砖后调转位置移动平台前端,机械臂通过视觉摄像头、高精度激光测距仪以及水平传感器,在瓷砖铺设过程中提供精准定位。
48.(8)机械臂在下按过程中,开启四台高频振动电机,机械臂持续下按力,配合高频振动力,保证垫层下降5mm左右。
49.(9)通过不断下按和振动后,瓷砖到达预定位置后关闭真空泵、开启排气阀,待真空吸盘完全释放,机械臂缓慢抬起,移动到初始位置。
50.(10)机械臂移动到初始位置后,小车四角外侧电缸收起,电缸收起完毕,瓷砖铺设完成。
51.(11)agv自动小车移动至指定位置后停止,并且机械人重复2-10步骤完成瓷砖的自动铺设。
52.(12)重复上诉步骤,直到瓷砖智能铺贴机器人铺完整排砖后,机械臂调整姿态至移动平台前端调整到初始位置。agv自动循迹小车舵轮原地旋转90度,移动到下一排需要铺设位置,agv自动循迹小车舵轮原地旋转-90度,通过激光测距系统小车水平移动到当前排铺第一块砖的位置。
53.(13)结束瓷砖铺设后,瓷砖自动铺贴机器人调整姿态,械臂调整位置至原始状态,完成所有的瓷砖铺设任务。
54.实施例8:
55.自动贴瓷砖机器人主要的性能指标为:
56.(1)15kg的额定负载;
57.(2)自重:小于600kg;
58.(3)供电方式:自收式电缆卷线盘;
59.(4)行走方式:行走速度:0.5m/s,定位精度5mm,自转精度2
°
;
60.(5)定位方式:激光雷达及避障系统;
61.(6)吸盘水平精度:0.5
°
;
62.(7)
±
0.4mm的重复定位精准度;
63.(8)1442mm的工作半径;
64.(9)手转运动的范围是-180
°
至180
°
,其最大的速度为240deg/s;
65.(10)腰关节回转的范围是-165
°
至230
°
,其最大的速度为150deg/s;
66.(11)小臂的运动范围是-130
°
至260
°
,其最大的速度为150deg/s;
67.(12)大臂的运动范围是-75
°
至150
°
,其最大的速度为150deg/s;
68.(13)腕摆的运动范围是-105
°
至210
°
,其最大的速度为240deg/s;
69.(14)腕转的运动范围是-180
°
至180
°
,其最大的速度为150deg/s。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1