一种具有升降平台的高空作业脚手架的制作方法
1.本实用新型涉及建筑施工设备技术领域,特别涉及一种具有升降平台的高空作业脚手架。
背景技术:
2.脚手架是指施工现场为便于工人操作并解决垂直和水平运输而搭设的各种支架,其在建筑施工领域中被广泛应用,脚手架可为工作人员提供相应高度的承载平台,从而能够让工作人员站在平台上完成相应的工作。
3.然而,现有的脚手架其结构单一,工人只能在一定高度内作业,当高度不够时,施工人员往往需要在脚手架上再搭建新的脚手架,作业范围小,操作繁琐,使用极其不方便,危险性大。
技术实现要素:
4.本实用新型提供一种具有升降平台的高空作业脚手架,涉及建筑施工设备技术领域,可有效地解决上述问题,结构简单,使用方便。
5.具体技术方案是一种具有升降平台的高空作业脚手架,包括:脚手框架、爬梯横梁、踏板、缓冲胶垫和升降平台架。
6.高空作业脚手架是由多组所述脚手框架上下堆叠组合而成,所述缓冲胶垫安装在两个相邻所述脚手框架的连接处,减少了高空作业中产生的冲击力,所述脚手框架的两侧分别设有若干个所述爬梯横梁,并沿着所述脚手框架的竖直方向平行设置,方便工作人员的攀爬,所述踏板设置于最上层所述脚手框架的底部,所述升降平台架位于所述踏板上方,并与所述踏板滑动连接。
7.进一步,所述脚手框架包括:立杆、横杆和加强连接架,所述立杆与所述横杆均为内部中空的方形金属管材,并连接成一个立方体框架,位于外侧的相邻两个所述立杆设有互相交叉的所述加强连接架,具有对脚手框架的固定加强作用,同时,加强连接架也可防止脚手架上的人员从高处掉落,起到围栏的作用。
8.进一步,所述爬梯横梁沿着其长度方向上设有若干个防滑凸起,防止工作人员在攀爬过程中滑倒,提高安全性能。
9.进一步,沿着所述踏板的长度方向上设有两条平行的滑道。
10.进一步,所述升降平台架包括:升降支撑杆组、连接轴、伸缩气缸、连接板和操作平台,所述连接板为“l”型结构,位于所述升降平台架下方的两个所述连接板平行设置,并设有若干个定位螺栓,其底部设有与所述滑道相匹配的滑块,位于所述升降平台架上方的两个所述连接板通过螺栓与所述操作平台相连接,所述升降支撑杆组纵向铰接于上下两个所述连接板之间,两组所述升降支撑杆组相对应的端部和中心处通过所述连接轴相铰接,两个所述伸缩气缸分别对应的设在两个下方所述连接板上,其伸缩杆与最下方的连接轴相接,通过伸缩气缸可实现控制升降平台的升起和下落。
11.进一步,所述升降支撑杆组包括:升降支撑杆,两个所述升降支撑杆互相交叉折叠,其中心处通过所述连接轴相铰接,若干个交叉的所述升降支撑杆沿着竖直方向上均匀布设,其相邻的端部通过所述连接轴相铰接。
12.进一步,所述连接板还包括:条形通孔和缓冲弹簧,所述连接板的一侧开设有所述条形通孔,所述升降支撑杆的一端可通过螺栓沿着所述条形通孔的长度方向移动,所述缓冲弹簧设置于所述条形通孔内,其一端与所述升降支撑杆的端部相连接,其另一端与条形通孔的一端相连接,可有效地消除工作人员在升降平台架上产生的顿挫感,提高了高空作业的安全稳定性。
13.在一个实施例中,首先,工作人员可通过爬梯横梁进行上下攀爬作业,当需要对小范围的高度进行作业时,可通过移动升降平台架至指定位置,并拧紧定位螺栓进行固定,启动伸缩气缸,伸缩气缸的伸缩杆推动连接轴至一定位置,最终满足工作人员的作用高度。
14.由于采用了以上技术方案,与现有技术相比,本实用新型通过在脚手架的顶层加设升降平台架,可有效地增大了施工作业范围,无需工作人员频繁拆卸安装脚手架,省时省力,大大提高了工作效率,解决施工人员因本装置高度不够而需要再次搭建脚手架的问题,同时,增设的缓冲胶垫和缓冲弹簧,可有效地缓解高空作业过程中所产生的晃动,起到减震缓冲的作用,安全性强,具有良好的经济效益。
附图说明
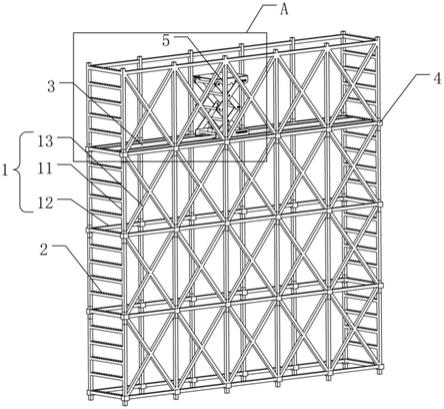
15.图1为一种具有升降平台的高空作业脚手架的结构示意图;
16.图2为本实用新型中a处的局部放大图;
17.图3为本实用新型中升降平台架的结构示意图。
18.附图标记说明:
19.1、脚手框架,2、爬梯横梁,3、踏板,4、缓冲胶垫,5、升降平台架,
20.11、立杆,12、横杆,13、加强连接架,
21.21、防滑凸起,
22.31、滑道,
23.51、升降支撑杆组,52、连接轴,53、伸缩气缸,54、连接板,55、操作平台,
24.511、升降支撑杆,
25.541、条形通孔,542、缓冲弹簧,543、定位螺栓。
具体实施方式
26.下面结合附图及实施例描述本实用新型具体实施方式:
27.需要说明的是,本说明书所附图中示意的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本实用新型可实施的限定条件,任何结构的修饰、比例关系的改变或大小的调整,在不影响本实用新型所能产生的功效及所能达成的目的下,均应仍落在本实用新型所揭示的技术内容得能涵盖的范围内。
28.同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本实用新型可实施的范围,其相对关系的改变或调整,
在无实质变更技术内容下,当亦视为本实用新型可实施的范畴。
29.实施例:结合图1-3,一种具有升降平台的高空作业脚手架,包括:脚手框架1、爬梯横梁2、踏板3、缓冲胶垫4和升降平台架5。
30.高空作业脚手架是由多组脚手框架1上下堆叠组合而成,可根据实际需求叠加,缓冲胶垫4安装在两个相邻脚手框架1的连接处,减少了高空作业中产生的冲击力,脚手框架1的两侧分别设有若干个爬梯横梁2,并沿着脚手框架1 的竖直方向平行设置,方便工作人员的攀爬,踏板3设置于最上层脚手框架1 的底部,升降平台架5位于踏板3上方,并与踏板3滑动连接。
31.进一步,脚手框架1包括:立杆11、横杆12和加强连接架13,立杆11与横杆12均为内部中空的方形金属管材,并连接成一个立方体框架,位于外侧的相邻两个立杆11设有互相交叉的加强连接架13,具有对脚手框架1的固定加强作用,同时,加强连接架13也可防止脚手架上的人员从高处掉落,起到围栏的作用。
32.进一步,爬梯横梁2沿着其长度方向上设有若干个防滑凸起21,防止工作人员在攀爬过程中滑倒,提高安全性能。
33.进一步,沿着踏板3的长度方向上设有两条平行的滑道31。
34.进一步,升降平台架5包括:升降支撑杆组51、连接轴52、伸缩气缸53、连接板54和操作平台55,连接板54为“l”型结构,位于升降平台架5下方的两个连接板54平行设置,其底部设有与滑道31相匹配的滑块,位于升降平台架5上方的两个连接板54通过螺栓与操作平台55相连接,升降支撑杆组51纵向铰接于上下两个连接板54之间,两组升降支撑杆组51相对应的端部和中心处通过连接轴52相铰接,两个伸缩气缸53分别对应的设在两个下方连接板54 上,其伸缩杆与最下方的连接轴52相接,通过伸缩气缸53可实现控制升降平台的升起和下落。
35.进一步,升降支撑杆组51包括:升降支撑杆511,两个升降支撑杆511互相交叉折叠,其中心处通过连接轴52相铰接,若干个交叉的升降支撑杆511沿着竖直方向上均匀布设,其相邻的端部通过连接轴52相铰接。
36.进一步,连接板54还包括:条形通孔541和缓冲弹簧542,连接板54的一侧开设有条形通孔541,升降支撑杆511的一端可通过螺栓沿着条形通孔541的长度方向移动,缓冲弹簧542设置于条形通孔541内,其一端与升降支撑杆(511) 的端部相连接,其另一端与条形通孔541的一端相连接,可有效地消除工作人员在升降平台架5上产生的顿挫感,提高了高空作业的安全稳定性。
37.本实用新型的工作原理如下:首先,工作人员可通过爬梯横梁2进行上下攀爬作业,当需要对小范围的高度进行作业时,可通过移动升降平台架5至指定位置,并拧紧定位螺栓543进行固定,启动伸缩气缸53,伸缩气缸53的伸缩杆推动连接轴52至一定位置,最终满足工作人员的作用高度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1