一种深井立体车库停车系统的制作方法
1.本实用新型涉及立体车库技术领域,尤其是一种深井立体车库停车系统。
背景技术:
2.传统立体车库多以地上停车楼形式建造,车位平行排列单提升机或中心旋转单提升机式多台射线型分布车位,运行效率较低,存取车时间等待长,特别是高峰期集中存取车辆时,等待时间更长,用车体验感差。另外对提升机的稳定性依赖极高,一旦出现故障则整个车库处于瘫痪状态,对存取车造成严重影响,且地上建筑物对场地、采光、植被等周边环境也具有较高的要求,无法满足老旧居民区,城市已有商业中心、地铁口、车站及机场等急需解决车位短缺停车难的需要。
技术实现要素:
3.针对现有技术的不足,本实用新型提供一种深井立体车库停车系统,以解决传统立体车库运行效率低的技术问题。
4.本实用新型采用的技术方案如下:
5.一种深井立体车库停车系统,包括多个停车层,多个停车层沿竖直方向依次搭接形成立体框架,每个停车层包括三个呈品字形排列的停车单元;
6.所述停车单元包括停车车位、与所述停车车位相邻设置的升降车位,所述停车车位上设有载车板;各升降车位沿竖直方向构成升降通道,升降通道内设有沿其上下运动、可停靠于升降车位的穿梭机,所述穿梭机上设有上、下两个用于搭载载车板的搭载位,穿梭机上还设有顶升机构,其用于驱动载车板在上、下两个搭载位之间移动;
7.当穿梭机停靠于升降车位时,可驱动其上搭载的载车板和相邻停车车位上的载车板水平移动从而交换位置。
8.进一步技术方案为:
9.所述穿梭机呈矩形,沿其长度方向两侧对称设有滑动支座,两侧的滑动支座可沿穿梭机长度方向相向或反向同步移动;
10.所述滑动支座上沿高度方向设有两组轨道,分别构成上、下搭载位;每组轨道上侧设有一传动链条,所述传动链条通过沿轨道长度方向均布的链轮张紧,每个链轮同轴连接一齿轮;
11.位于所述传动链条两端的齿轮还连接在移动座上,所述移动座由驱动装置驱动沿穿梭机宽度方向来回移动;
12.所述载车板呈矩形,沿其长度方向两侧设有与所述齿轮啮合传动的齿条、以及与所述轨道配合的导轮。
13.每个停车单元的升降车位位于中部,停车车位对称设置在升降车位的两侧。
14.每个停车层的其中两个停车单元的沿纵向顺次设置,第三个停车单元沿横向设置。
15.所述立体框架位于深井中,所述深井截面为圆形,深井内位于所述立体框架旁还设有消防通道和步梯。
16.位于顶部停车层的上方设有对接层,所述对接层包括三个呈品字形排列的对接单元,所述对接单元中部设有旋转车位,所述旋转车位可360
°
旋转从而与下方停车层的升降车位的位置对齐。
17.各对接单元分别与位于地面的出入口对应连通。
18.本实用新型的有益效果如下:
19.存取车效率高、整个系统的运行效率和稳定性高。
20.停车单元品字型排布,充分利用深井空间。三组品字形独立的停车区各配备一台穿梭机,可实现车辆同步存取,相对于单提升机效率大幅提高。即使某台穿梭机处于故障状态,其他两台仍可正常工作,降低车库瘫痪风险,提高车库运行的稳定性。
21.通过穿梭机实现同层车位空载车板与负载车辆载车板的同步移动交换位置,极大地提高了单次存取车的效率。
附图说明
22.图1为本实用新型的结构示意图。
23.图2为本实用新型的某一空停车层的结构示意图。
24.图3为本实用新型的相邻两停车层的侧视图。
25.图4为本实用新型的穿梭机的结构示意图。
26.图5为本实用新型的滑动支座打开状态载车板位于下轨道的结构示意图。
27.图6为本实用新型的滑动支座收回状态载车板位于上轨道的结构示意图。
28.图7为本实用新型的载车板的局部结构示意图。
29.图8为本实用新型穿梭机在某个停车单元停车过程的初始状态示意图。
30.图9为本实用新型穿梭机在某个停车单元停车过程的中间状态示意图。
31.图10为本实用新型穿梭机在某个停车单元停车过程的结构状态示意图。
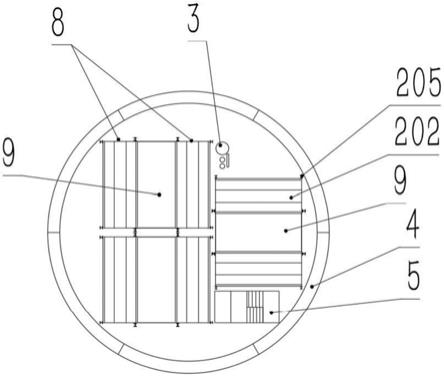
32.图11为本实用新型的某一停有车辆的停车层的结构示意图。
33.图12为本实用新型的相邻两停车层的主视图。
34.图13为本实用新型的对接层的结构示意图。
35.图中:1、车辆出入区;2、立体框架;3、消防管道;4、管片衬砌;5、步梯;6、封底;7、旋转车位;8、停车车位;9、升降车位;10、消防应急人工控制系统;101、第一出入口;102、第二出入口;103、第三出入口;
36.201、穿梭机;202、载车板;203、双向电缸;204、导轨;205、钢结构件;2011、主轴;2012、减速器;2013、下轨道;2014、上轨道;2015、传动链条;2016、滑动支座;2017、电缸;2018、齿轮;2019、电机;2021、垂直导轮;2022、水平导轮;2023、齿条;2031、移动座;2033、链轮。
具体实施方式
37.以下结合附图说明本实用新型的具体实施方式。
38.一种深井立体车库停车系统,如图1所示,利用城区楼宇间或道路旁空闲土地,建
造内壁直径为16米的深井,该直径也可为15-17米之间的其他尺寸,深度可根据停车数量设计需要确定。深井被建造好后,借助于内部封底6和管片衬砌4安装机械式多层立体框架2,深井的地面部分设有车辆出入区1。
39.立体框架2由多个停车层沿竖直方向依次连接成,每个停车层包括三个呈品字形排列的停车单元;各停车单元沿竖直方向构成一组停车区。
40.停车区顶部位于深井的地面部分上设有车辆出入区1。
41.如图2所示,立体框架2的每个停车层由三个品字形布置的停车单元共九个标准位置组成,层间借助均布于外围的钢结构件205支撑连接。
42.在每个停车单元中,由分布在两侧的停车车位8和中间的升降车位9组成;各停车车位8上设有载车板202,各升降车位9沿竖直方向构成升降通道,升降通道内设有可沿其上下运动、可停靠在升降车位上的穿梭机201;
43.如图3所示,穿梭机201用于搭载载车板202沿升降通道内设置的导轨204上下运动。
44.穿梭机201上设有上、下两个搭载位、以及顶升机构,顶升机构用于驱动载车板202在上、下两个搭载位之间移动;此外,当穿梭机201停靠在某一升降车位时,利用两个搭载位的高度差,穿梭机201可驱动其上搭载的载车板与相邻停车车位上的载车板水平相向移动从而交换位置,将穿梭机上负载车辆的载车板换至停车车位同时将停车车位置上的空载车板换至穿梭机、或将停车车位上负载车辆的载车板换至穿梭机同时将穿梭机上的空载车板换至停车车位,即通过同步换板运动实现存、取车。
45.具体的,如图4和图5所示,穿梭机201呈矩形,沿其长度方向两侧对称设有滑动支座2016,两侧的滑动支座2016通过丝杆滑块传动机构与减速器2012及其主轴2011连接,主轴2011两端分别通过轴承座与穿梭机201车体两侧的滑动支座2016活接,在减速器2012驱动下主轴2011正反向旋转可以实现滑动支座2016的沿穿梭机201长度方向同步相向运动成收回状态或反向运动成打开状态。
46.具体的,滑动支座2016上沿高度方向设有两组轨道分别为上轨道2014和下轨道2013,分别构成上、下搭载位;顶升机构采用升降电缸2017,其设置在穿梭机201内侧四角处,升降电缸2017伸缩端上下伸缩可实现载车板202升降。
47.如图5和图6所示,分别为滑动支座2016打开状态下载车板202在下部搭载位的状态、滑动支座2016收回状态下载车板202在上部搭载位的状态。
48.如图6所示,滑动支座2016收回状态下,载车板202在上部搭载位即载车板202由上轨道2014支撑。当载车板202位于下轨道2013时,载车板与升降电缸2017支撑形成对应关系,滑动支座2016打开,升降电缸2017向上顶住载车板202升起,并到达上轨道2014位置,随即减速器2012带动滑动支座2016关闭,将载车板限位到上轨道2014内,实现载车板202在上下轨道间的位置交换移动。
49.具体的,如图4所示,每组轨道上侧均设有一传动链条2015,传动链条2015通过沿轨道长度方向均布的链轮2033张紧,每个链轮2033同轴连接一齿轮2018;
50.具体的,如图7所示,载车板202呈矩形,沿其长度方向两侧设有与齿轮2018啮合传动的齿条2023,齿条2023下侧设有与轨道配合的垂直导轮2021和水平导轮2022,导轮均为无动力导轮。其中垂直导轮2021用于与轨道底面配合,水平导轮2022用于与轨道的侧面配
合。当导轮定位在轨道内时,齿条2023恰与穿梭机上的齿轮2018啮合,通过齿轮组转动,带动载车板202移动。
51.如图4所示,本实施例的穿梭机201的位于传动链条2015两端的齿轮2018还连接在移动座2031上,移动座2031由设置在轨道外侧的双向电缸203驱动沿穿梭机201宽度方向来回移动。
52.当双向电缸203向左右移动时,设置于移动座2031上的齿轮2018也同步左右滑动,借助于柔性传动链条2015的补偿作用,实现两端齿轮2018的左右移动,同时齿轮2018在传动链条2015的带动下同步独立转动,驱动位于穿梭机201两侧的载车板202与穿梭机上搭载的载车板交换位置,即完成存取车换板功能。
53.具体的,其中一个链轮2033在电机2019驱动下通过传动链条2015将动力传输给其余链轮2033再通过连接轴传输给各齿轮2018。在传动链条2015的串联下所有齿轮2018均可同步转动。
54.具体的,双向电缸203可控制其两端的独立齿轮2018移动。当穿梭机在沿升降通道运动过程中,双向电缸203控制两端移动座2031收回,对应的两端的齿轮2018处于收回状态,不会影响穿梭机升降运动。
55.具体的,齿轮2018沿着轨道长度方向均布设置,间距为300-500mm。
56.如图8至图10所示,为存车过程中穿梭机及相应载车板的运动状态示意图。穿梭机201通过载车板202将车辆移动至某一停车层的升降车位9中,并准备将车辆移动至右侧的停车车位8中。
57.如图8所示,此时穿梭机202将其上搭载车辆的载车板202抬升至上轨道位置,双向电缸驱动右侧移动座向右,右端的齿轮与右侧停车车位8上的空载车板202上的齿条啮合传动,将右侧载车板202拖动至穿梭机201下轨道中,同时穿梭机201上原负载车辆的载车板202沿上轨道向右移动至停车车位8。两个板移动换位中间状态如图9所示,穿梭机负载车辆的载车板在上轨道位置,停车车位的空载状态载车板在下轨道位置,两者之间具有一定的安全距离,不会对换板造成影响。位置交换完成状态如图10所示,此时负载车辆的载车板202位于停车车位上,原位于右侧停车车位上的空载车板202位于升降车位的穿梭机201上,存车完毕后,穿梭机201搭载空的载车板202沿升降通道运动离开该停车层的升降车位。
58.如图11所示,为某一停有车辆的停车层的截面示意图。深井截面为圆形,每个停车层的其中两个停车单元的沿纵向顺次设置,第三个停车单元沿横向设置。借助于停车单元与管片衬砌4间的间隙位置还设置有步梯5和消防管道3,用于紧急情况处理时人员进入。
59.如图12所示,本领域技术人员可以理解,穿梭机沿升降通道运动可利用类似电梯提升装置等驱动机构提供动力,或者在穿梭机外侧设置的可自主爬行的主动轮沿如图所示的导轨204升降运动。
60.如图13所示,在车辆出入区内设置有位于顶部停车层的上方的对接层,其包括三个呈品字形排列的对接单元,对接单元中部设有旋转车位7,旋转车位7可圆周360
°
旋转至与下方停车层的升降车位位置对应。各对接单元的旋转车位分别与位于地面的出入口:第一出入口101、第二出入口102和第三出入口103对应连通。三个出入口具体方向位置还可根据需要设置,如可以为纵向平行排列,或者以中点为圆心对称分布。车辆出入区内还设置有消防应急人工控制系统10,确保深井内部车辆安全。
61.具体的,旋转车位的旋转动力可通过旋转支承等旋转设备提供动力。
62.本实施例的深井立体车库停车系统,空间利用率高,每个停车层可放置六辆车,标准层高1.91米,最佳停放层数为17,有效深度32.5米;占地面积不足200m2的场地可放置100辆车;另根据放置车辆类型,层高可做适当的变化。
63.本实施例的深井立体车库停车系统的存车过程为:
64.车辆自车辆出入区的出入口驶入首层对接层,并停放在一个对接单元的旋转车位上,旋转车位上的穿梭机及载车板在方向旋转器的带动下旋转至满足与升降通道相对齐的位置,穿梭车带动负载车辆的载车板沿升降通道运动至具有空车位停车层的升降车位上,将负载车辆的载车板与停车车位上的空载车板交换位置,然后并将空载车板运回首层等待新的指令。取车时则是将穿梭机负载的空载车板与停车车位上负载车辆的载车板交换位置。
65.本实施例的运行效率高,品字型分布独立运行的三个停车区,各配备一台穿梭车,可实现车辆同步存取,相对于单提升机效率大幅提高。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1