一种用于大面积吊杆快速自动吊平装置的制作方法
1.本实用新型涉及建筑结构领域,尤其是涉及一种用于大面积吊杆快速自动吊平装置。
背景技术:
2.吊杆是一种连接结构,在建筑施工中得到广泛使用。对于建筑物内天花板的安装,通常是将吊杆固定于上层楼板,而后使吊杆的下端穿过龙骨上预留的安装孔,旋拧螺母与吊杆的下端连接,将龙骨限位在吊杆上,完成龙骨与吊杆的连接;最后将天花板与龙骨连接固定即可。
3.对于上述安装过程,发明人认为建筑物会因环境的影响而发生振动,例如台风或地壳运动;建筑物在振动过程中,易使龙骨与吊杆之间产生相对位移,致使龙骨发生倾斜。天花板跟随龙骨移动后,使天花板与天花板之间或天花板与墙壁之间产生缝隙,掉落灰尘,影响建筑物内人们的工作和生活。
技术实现要素:
4.为了便于提高龙骨的水平度,从而使灰尘不易掉落,本实用新型提供一种用于大面积吊杆快速自动吊平装置。
5.本技术提供的一种用于大面积吊杆快速自动吊平装置采用如下的技术方案:
6.一种用于大面积吊杆快速自动吊平装置,包括处理器、若干倾斜检测器和若干驱动组件;
7.所述驱动组件的一端用于与吊杆固定连接,将龙骨限位在所述吊杆上;
8.所述驱动组件的另一端用于与所述龙骨连接,带动所述龙骨移动;
9.所述倾斜检测器被配置为用于检测所述龙骨是否倾斜;
10.所述处理器与所述倾斜检测器电连接,所述处理器与若干所述驱动组件的控制端电连接;所述处理器被配置为用于在所述倾斜检测器检测对应的所述龙骨倾斜时,控制对应的所述驱动组件启动;在所述倾斜检测器检测对应的龙骨水平时,控制对应的所述驱动组件制动。
11.通过采用上述技术方案,在某个倾斜检测器检测到对应连接的龙骨呈倾斜状态时,处理器控制对应的驱动组件启动,使驱动组件带动与其连接的龙骨移动,对龙骨的水平度进行调节,有助于提高龙骨的水平度,从而有助于提高天花板的水平度,使天花板与天花板之间或者天花板与墙壁之间不易产生缝隙,从而使天花板与上层楼板之间的灰尘不易掉落至天花板下方的空间内,不易影响建筑物内人们的工作和生活。
12.可选的,所述驱动组件包括驱动器和伸缩件,所述伸缩件的一端用于与所述吊杆固定连接,另一端与所述龙骨和所述驱动器均连接,用于将龙骨限位在所述吊杆上;
13.所述处理器与所述驱动器的控制端电连接,被配置为控制所述驱动器的启动与制动;
14.所述驱动器用于在启动时,带动对应连接的所述伸缩件伸缩。
15.通过采用上述技术方案,驱动组件包括了驱动器和伸缩件,利用驱动器带动伸缩件伸缩,以实现调节龙骨水平度的目的,结构简单,成本低廉,易于安装。此外,由于伸缩件的一端与吊杆固定连接,另一端与龙骨和驱动器均连接;因此在驱动器的约束下,龙骨不易发生移动;即使发生移动,也会因驱动器驱动伸缩件的伸缩再次趋于水平。
16.可选的,所述伸缩件采用阻尼器,所述阻尼器的一端与所述吊杆的下端固定连接;所述阻尼器的另一端分别与所述龙骨和所述驱动器的输出端固定连接。
17.通过采用上述技术方案,阻尼器的惯性小,有助于提高龙骨的调节精度,从而有助于提高龙骨的水平度。
18.可选的,所述驱动组件包括动力器,所述动力器的输出端与所述龙骨连接,所述动力器远离自身输出端的一端与所述吊杆固定连接;
19.所述处理器与所述动力器的控制端电连接,被配置为控制所述动力器的启动与制动;
20.所述动力器用于在启动时,带动对应连接的所述龙骨移动。
21.通过采用上述技术方案,动力器启动后,输出端带动龙骨移动,即可达到改变龙骨的位置,相比于使用伸缩件,成本进一步降低,便于安装和使用。
22.可选的,所述倾斜检测器包括反射式红外传感器和反射板;所述反射式红外传感器的前端朝向同一直线上相邻所述反射式红外传感器的后端,所述反射板安装在对应所述反射式红外传感器前方的所述反射式红外传感器的后端;
23.所述反射式红外传感器被配置为在与前方的所述反射板之间存在高度差时,视为对应的所述龙骨倾斜。
24.通过采用上述技术方案,反射式红外传感器的发射端向前方发射红外线,红外线到达前方的反射板后,被折射。在反射式红外传感器与反射板位于同一竖直高度时,折射后的红外线被反射式红外传感器的接收端接收;若位于同一竖直高度,接收端接收的红外线强度减弱甚至接收不到红外线,此时处理器启动驱动组件对龙骨的位置进行调节,有助于提高龙骨的水平度,从而使灰尘不易掉落,影响人们的工作和生活。此外,由于反射板被安装在前方的反射式红外传感器上,因此同一条直线上的龙骨始终保持在同一水平高度。
25.可选的,所述倾斜检测器采用倾角传感器,在检测的倾角数据大于预设的倾角阈值时,视为对应的所述龙骨倾斜。
26.通过采用上述技术方案,直接利用倾角传感器对龙骨的水平度进行检测,方便快捷,电子元件数量少,节约成本,便于安装。
27.可选的,所述处理器电连接有光照强度传感器和报警器;
28.所述光照强度传感器用于与龙骨、吊杆或天花板连接,被配置为对所述天花板上方空间中的光照强度进行检测;
29.所述处理器被配置为在所述光照强度大于预设的光照阈值时,启动所述报警器报警。
30.通过采用上述技术方案,光照强度大于光照阈值证明有光投入到天花板与上层楼板之间的空间内,此时进行报警,有助于提醒建筑物内的人们主动对天花板进行维修,对龙骨的水平度进行调整,以免影响工作和生活。
31.可选的,还包括固定板,所述固定板上开设有用于与所述吊杆螺纹连接的螺纹孔,所述固定板上还开设有若干定位孔;
32.所述定位孔中插接有限位板,若干所述限位板围成一空腔,用于供所述驱动组件插入。
33.通过采用上述技术方案,固定板便于将驱动组件安装在吊杆上,有助于提高安装效率;限位板有助于提高驱动组件位于固定板上的稳定性。
34.综上所述,通过设置倾斜检测器、驱动组件和处理器,在龙骨发生偏斜时,自动对龙骨进行调节,有助于提高龙骨的水平度,使天花板与天花板之间或者天花板与墙壁之间不易产生缝隙,灰尘不易掉落,进而不易影响建筑物内人们的工作和生活。
35.另外,使用阻尼器作为伸缩件,负责对龙骨的水平度进行调节,有助于提高调节精度,从而有助于提高龙骨的水平度,保证天花板不易存留有缝隙。
附图说明
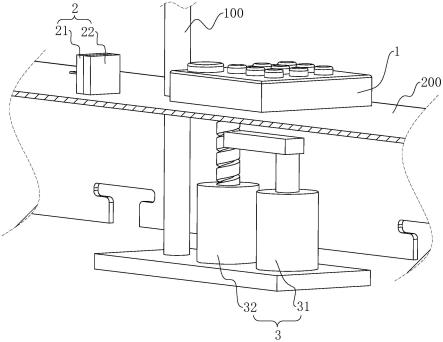
36.图1是本技术实施例1的整体结构示意图。
37.图2是本技术实施例1的龙骨局部截面图。
38.图3是本技术实施例2的龙骨局部截面图。
39.图4是本技术实施例3的龙骨局部截面图。
40.图5是本技术实施例4的龙骨局部的固定板与吊杆的爆炸视图。
41.附图标记说明:
42.1、处理器;2、倾斜检测器;21、反射式红外传感器;22、反射板;23、倾角传感器;3、驱动组件;31、驱动器;32、伸缩件;33、动力器;4、光照强度传感器;5、报警器;6、固定板;61、螺纹孔;62、定位孔;63、限位板;100、吊杆;200、龙骨。
具体实施方式
43.本技术实施例公开一种用于大面积吊杆快速自动吊平装置。
44.实施例1
45.参照图1和图2,用于大面积吊杆快速自动吊平装置包括处理器1、若干倾斜检测器2和若干驱动组件3。其中,倾斜检测器2包括反射式红外传感器21和反射板22;驱动组件3包括驱动器31和伸缩件32,伸缩件32采用阻尼器,具体的,阻尼器选用电涡流阻尼器。此外,倾斜检测器2还可以采用对射式红外传感器、雷达传感器或距离传感器,旨在能够检测相邻龙骨200之间是否存在高度差;伸缩件32还可以采用外驱动伸缩杆或电子伸缩杆。以本实施例中的选择为例,下面对自动掉平装置进行详细阐述。
46.参照图1和图2,驱动组件3的一端用于与吊杆100固定连接,将龙骨200限位在吊杆100上;另一端用于与龙骨200连接,带动龙骨200移动。具体的,伸缩杆共有两端端头,且两端端头均可以发生移动。在安装过程中,使吊杆100穿过龙骨200上预留的安装孔,而后将伸缩件32的一端与吊杆100的下端固定连接,另一端与龙骨200固定连接或者抵接,将龙骨200限位在吊杆100上。由于本实施例中的伸缩件32采用阻尼器,即阻尼器的一端与吊杆100的下端固定连接,另一端与龙骨200固定连接或抵接。
47.不难理解,在安装天花板的过程中,会在上层楼板上固定若干吊杆100,每个龙骨
200可以仅由一个吊杆100固定,也可以由多个吊杆100固定。对于驱动组件3而言,驱动组件3与吊杆100一一对应设置,即驱动组件3的数量与吊杆100的数量相同。
48.每个驱动组件3中的驱动器31均安装在同组的伸缩件32一侧,且驱动器31的输出端与对应伸缩件32的一端固定连接;在本实施例中,驱动器31的输出端与对应伸缩件32靠近龙骨200的一端固定连接,驱动器31可以是无杆电缸、直线电机或气缸。启动驱动器31后,驱动器31的输出端带动对应的伸缩件32伸缩。在本实施例中,即驱动器31带动对应的阻尼器伸缩,阻尼器的总长度发生变化,使龙骨200与吊杆100之间的距离改变,即龙骨200升高或降低。由于阻尼器具有抵抗运动惯性的特点,因此相比于直接使用驱动器31驱动龙骨200升高或降低的方式,阻尼器有助于提高龙骨200的调节精度,从而有助于提高龙骨200和天花板的水平度。
49.参照图2,倾斜检测器2被配置为用于检测龙骨200是否倾斜,在安装过程中,固定完毕龙骨200后,将反射式红外传感器21安装在龙骨200上。每个龙骨200上至少安装一个反射式红外传感器21,且位于同一条直线上的若干龙骨200上的反射式红外传感器21的朝向均相同。使位于同一条直线上的若干反射式红外传感器21呈一前一后设置。而后将每个反射式红外传感器21对应的反射板22安装在前一个反射式红外传感器21的后端,对于朝向墙壁的反射式红外传感器21可以将对应的反射板22安装在墙壁上。使前一个反射式红外传感器21升高或下降时,后一个反射式红外传感器21的反射板22同步升高或下降,从而使后一个反射式红外传感器21的接收端无法接收到发射端发出的红外线,或者红外线强度减弱,此时即可判定两个反射式红外传感器21对应的龙骨200之间具有高度差,从而视后一个反射式红外传感器21所对应的龙骨200发生倾斜。
50.需要说明的是,反射式红外传感器21的使用方法为现有技术,检测两个龙骨200之间是否具有高度差也仅是使用了反射式红外传感器21的基本功能。
51.处理器1可以是单片机、plc、mcu或由若干公知电路集成的处理芯片。处理器1与倾斜检测器2电连接,即与反射式红外传感器21电连接。处理器1与若干驱动组件3的控制端电连接,即与驱动器31的控制端电连接。处理器1被配置为用于在倾斜检测器2检测对应的龙骨200倾斜时,控制对应的驱动组件3启动;在倾斜检测器2检测对应的龙骨200水平时,控制对应的驱动组件3制动。具体的,处理器1被配置为用于控制驱动器31启动与制动,且驱动器31启动后,带动对应连接的伸缩件32伸缩,即带动阻尼器伸缩。
52.需要说明的是,整个控制过程仅使用了简单的逻辑判断。例如处理器1在接收到反射是红外传感器传输的红外数据后,即可判断龙骨200是否发生倾斜。若倾斜,则使对应的驱动器31通电工作;若不倾斜,则使对应的驱动器31断电制动。
53.实施例1的实施原理为:在某个龙骨200相对于对应的吊杆100发生移动后,即龙骨200所处高度升高或降低,位于该龙骨200上的反射式红外传感器21产生的红外数据发生变化,处理器1判定对应的龙骨200发生倾斜,控制对应的驱动器31启动,改变龙骨200所处高度,将发生移动的龙骨200复位。同时,在该龙骨200移动的过程中,其后方的龙骨200也不断调整位置,有助于保证所有龙骨200均位于同一高度,从而有助于提高天花板的水平度。
54.实施例2
55.参照图3,本实施例与实施例1的不同之处在于,驱动组件3包括动力器33,动力器33可以是无杆电缸、无杆气缸、气缸、电缸或直线电机。动力器33的输出端与龙骨200连接,
动力器33远离自身输出端的一端与对应的吊杆100固定连接。在安装过程中,提高龙骨200所处高度,使吊杆100的下端穿过龙骨200上预留的安装孔。而后将动力器33的输出端与龙骨200焊接,将动力器33的底端与吊杆100固定连接,启动动力器33后,动力器33带动对应的龙骨200升高或降低,达到改变龙骨200所处高度的目的。
56.处理器1与动力器33的控制端电连接,被配置为控制动力器33的启动与制动。动力器33在启动时,带动对应连接的龙骨200移动。
57.实施例3
58.参照图4,本实施例与实施例1的不同之处在于,倾斜检测器2采用倾角传感器23,处理器1与倾角传感器23电连接,被配置为在倾角数据大于预设的倾角阈值时,视为对应的龙骨200倾斜。
59.实施例4
60.参照图5,本实施例与实施例1的不同之处在于,处理器1电连接有光照强度传感器4和报警器5。光照强度传感器4用于安装在龙骨200、吊杆100或天花板上,被配置为对天花板上方空间中的光照强度进行检测。处理器1被配置为在光照强度大于预设的光照阈值时,启动报警器5报警。报警器5可以是通讯模块,被配置为用于向指定的邮箱或智能终端传输报警信息;报警器5还可以是声音报警器5,用于安装在天花板下方的空间中,或者龙骨200上,在启动后,发出声音报警。
61.还包括固定板6,用于与吊杆100的下端固定连接。固定板6上开设有用于与吊杆100螺纹连接的螺纹孔61,还开设有若干定位孔62。定位孔62中插接有限位板63,若干限位板63可以围成一空腔,用于供驱动组件3插入;有助于提高驱动组件3的稳定性。
62.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1