喷抹装置及喷抹机器人的制作方法
本技术涉及建筑机器人,具体而言,涉及一种喷抹装置及喷抹机器人。
背景技术:
1、目前我国的建筑业得到了飞速的发展,市场广阔。而在建筑主体建成以后,都需要对其内墙进行抹灰,目前一般都采用人工抹墙方式完成。
2、目前市场虽有部分产品可以实现单独抹平的机器,但是都是需要复杂的人工协助,停留在半自动化水平。
3、喷涂机和抹灰机可以自动实现喷浆和自动刮平,但是由于需要两台机联合作业,受限于一般住宅商品放面积都较小,双机联合作业在狭小空间内施工较为困难,转场也较为困难,作业时相互影响。另外双机的成品实现喷浆和刮平成本也比较高。
4、因此进行喷抹一体机的研发尤为急迫,他的市场前景非常可观。
5、将喷涂机和刮平机实现为一体机,其关键难点技术之一在于受机器在作业时进行穿门过户时整机长度尺寸有限,机器长度尺寸最大不能超过1000mm。机器总长度尺寸为底盘长度方向上尺寸与执行器在该方向的宽度尺寸,而底盘长度尺寸目前700左右并且机身已经不太稳定,因此留给执行器的宽度尺寸非常有限。
技术实现思路
1、本技术的目的在于提供一种喷抹装置,其能够用于改善现有的执行器不能同时实现喷涂和刮溢料的问题。
2、本技术的另外一个目的在于提供一种喷抹机器人,其包括上述喷抹装置,其具有该喷抹装置的全部特性。
3、本技术的实施例是这样实现的:
4、本技术的实施例提供了一种喷抹装置,包括:
5、抹灰板,沿上下方向倾斜设置,用于在作业面上从下至上进行抹灰;
6、溢料槽,位于所述抹灰板的后侧,用于在所述抹灰板进行抹灰作业时收集多余的浆料,所述溢料槽的长度方向上的一端具有出料口;
7、喷枪,用于向所述作业面喷涂浆料,所述喷枪相对于所述溢料槽可移动设置,所述喷枪的移动方向与所述溢料槽的长度方向相同;
8、刮料板,相对于所述溢料槽可移动设置,所述刮料板的移动方向与所述溢料槽的长度方向相同,至少部分的所述刮料板延伸至所述溢料槽内,用于将所述溢料槽内的浆料从所述出料口排出;以及
9、驱动单元,设置于所述溢料槽且与所述喷枪传动连接;
10、所述喷枪和所述刮料板之间具有连接状态和分离状态,在所述连接状态,所述驱动单元驱动所述喷枪与所述刮料板一同沿着所述溢料槽的长度方向移动;在所述分离状态,所述驱动单元驱动所述喷枪单独沿着所述溢料槽的长度方向移动。
11、喷枪与刮料板之间可以有连接或者分离的两种状态,从而使得驱动单元可以单独驱动喷枪横移或者同时驱动喷枪与刮料板一同横移,在溢料槽的有限的空间内,实现了喷涂和刮溢料两种功能,能够有效改善现有的技术问题。
12、另外,根据本技术的实施例提供的喷抹装置,还可以具有如下附加的技术特征:
13、在本技术的可选实施例中,所述喷枪设置有第一锁定件,所述刮料板设置有第二锁定件,当所述第一锁定件和所述第二锁定件配合时,所述喷枪和所述刮料板处于所述连接状态;
14、所述喷抹装置还包括解锁机构,所述解锁机构用于驱动所述第二锁定件脱离所述第一锁定件,以使所述喷枪和所述刮料板切换至所述分离状态。
15、第一锁定件和第二锁定件可以相互锁定,也可以在解锁机构的驱动下解锁,可以满足喷枪与刮料板的配合需求。
16、在本技术的可选实施例中,所述第一锁定件为卡合块,所述第二锁定件为卡合销,所述卡合块具有与所述卡合销配合的卡槽,所述卡合销可活动地设置于所述刮料板。
17、卡合块与卡合销的结构简单,占用空间小,能够在满足锁定与解锁的功能的同时,降低对于空间的要求,更加充分地利用空间。
18、在本技术的可选实施例中,以所述喷枪的运动方向为第一方向,以垂直于所述第一方向的方向为第二方向,所述卡槽包括沿所述第一方向分布的宽径段和窄径段,所述解锁机构包括能够沿第二方向伸缩的推杆,所述推杆能够推动所述卡合销在所述第二方向脱出所述宽径段,所述喷枪运动时,所述推杆从所述窄径段脱出所述宽径段或者进入所述宽径段;
19、所述推杆的宽度为d1,所述窄径段的宽度为d2,所述卡合销的宽度为d3,满足:d1<d2<d3。
20、通过设计推杆宽度、窄径段宽度以及卡合销的宽度,使得推杆未工作时,窄径段可以限制卡合销的横向运动,而推杆在第二方向推动卡合销时,可以使得卡合销从宽径段脱出,而由于窄径段的宽度大于推杆的宽度,推杆不会干涉卡合块的运动。
21、在本技术的可选实施例中,所述喷抹装置还包括:
22、导轨,固定于所述溢料槽的后侧,所述喷枪和所述刮料板均可滑动地设置于所述导轨。
23、导轨能够引导喷枪和刮料板的运动,并且导轨设置在溢料槽的后侧,可以节省空间。
24、在本技术的可选实施例中,所述驱动单元包括驱动机构和传动机构,所述驱动机构设置于所述导轨的一端且处于所述溢料槽的下方,所述传动机构包括传动圈和多个导向轮,所述多个导向轮布设于所述溢料槽后侧,所述传动圈绕设于所述多个导向轮,所述喷枪与所述传动圈固定连接,所述驱动机构的输出端与所述导向轮连接。
25、导向轮可以引导传动圈的转动路径,并且和传动圈一同布设于溢料槽后侧,可以有效利用后侧空间,传动圈则可以带动喷枪运动,满足作业需求。
26、在本技术的可选实施例中,多个所述导向轮分为驱动轮、第一从动轮、第二从动轮、第三从动轮和第四从动轮,所述驱动轮连接于所述驱动机构的输出端,所述驱动轮处于所述溢料槽的后侧且位于下侧,所述第一从动轮、所述第二从动轮位于所述导轨的一端且处于所述溢料槽的后侧,所述第三从动轮、所述第四从动轮位于所述导轨的另一端且处于所述溢料槽的后侧。
27、通过布设多个从动轮以及驱动轮,既可以满足喷枪的运动行程,又可以与驱动机构结合起来,在有限的空间内合理布设。
28、在本技术的可选实施例中,所述溢料槽还包括托块,所述托块连接于溢料槽的顶部,所述传动圈的处于所述导轨上方的部分被所述托块承托。
29、通过将传动圈的位于导轨上方的部分承托,可以避免传动圈的下垂导致与导轨间干涉而影响喷枪和刮料板的运动。
30、在本技术的可选实施例中,所述传动圈为链条,所述导向轮为链轮;
31、或者是,所述传动圈为传动带,所述导向轮为带轮。
32、链条链轮配合或者传动带与带轮配合,均可以实现传动与导向。
33、在本技术的可选实施例中,所述喷抹装置还包括第一到位传感器和第二到位传感器,所述第一到位传感器设置于所述溢料槽长度方向上的一端,所述第二到位传感器设置于所述溢料槽长度方向上的另一端,所述第一到位传感器和所述第二到位传感器分别用于限定所述喷枪在所述溢料槽长度方向上横移的极限位置。
34、通过设置第一到位传感器和第二到位传感器,可以有效限定出喷枪的移动范围,使得喷枪可以在所需范围内运动,并且可以根据喷枪的位置来使其与刮料板连接或者分离。
35、在本技术的可选实施例中,所述喷枪的喷料口位于所述溢料槽的上方。
36、喷枪在工作时,喷料口所溢流的浆料可以被溢料槽承接,避免污染环境和设备。
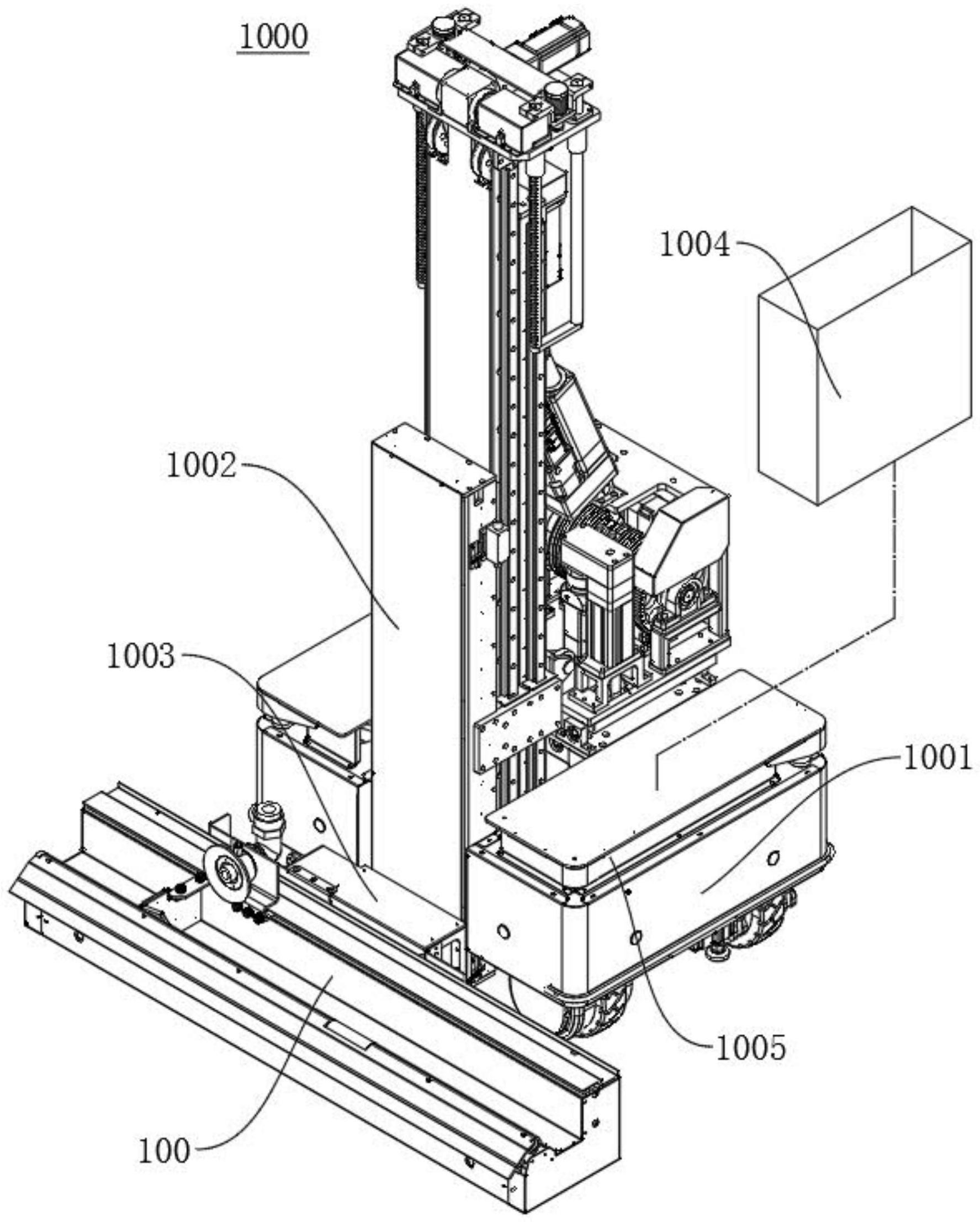
37、本技术的实施例提供了一种喷抹机器人,包括:
38、底盘;
39、升降机构,所述升降机构设置于所述底盘;
40、旋转机构,所述旋转机构设置于所述升降机构的输出端;
41、回收料斗,所述回收料斗设置于所述底盘;以及
42、根据上述任一项所述的喷抹装置,所述喷抹装置与所述旋转机构的输出端连接;
43、其中,所述喷抹机器人包括作业状态和浆料回收状态,所述作业状态下,所述喷枪和所述刮料板处于分离状态,所述升降机构带动所述喷抹装置上升,所述驱动单元带动所述喷枪对作业面左右喷料,所述抹灰板将所述作业面上的浆料刮平;所述浆料回收状态下,所述喷枪和所述刮料板处于连接状态,所述升降机构带动所述喷抹装置上升到所述回收料斗的上方,所述旋转机构带动所述喷抹装置向着所述回收料斗倾斜,所述驱动单元带动所述刮料板将所述溢料槽内的浆料刮除并使得浆料落到所述回收料斗中。
44、喷抹机器人通过使用该喷抹装置,既能够实现对于作业面的喷涂与抹平工作,又能够实现对溢料的刮除,不需要额外占用安装空间,能够满足实际作业的空间要求和稳定性要求。
45、在本技术的可选实施例中,所述回收料斗处于所述底盘的右侧,所述驱动单元包括驱动机构,所述驱动机构处于所述溢料槽的左下侧。
46、根据回收料斗的位置,溢料槽下方的空间可以有不同的大小,而回收料斗位于底盘右侧时,溢料槽的左下方空间相对于右下方更大,将之利用起来安装驱动机构,可以提高空间的利用率,既使得驱动机构能够发挥作用,又不需要额外占用外部空间。
- 还没有人留言评论。精彩留言会获得点赞!