一种用于装配式结构的轻量化和模块化自爬升外架系统的制作方法
1.本发明涉及装配式建筑围护架体技术领域,尤其涉及一种用于装配式结构的轻量化和模块化自爬升外架系统。
背景技术:
2.当前装配式建筑蓬勃发展,装配化、集成化、一体化程度越来越高,装配式建筑日益成为中国建筑行业转型升级的主力军。现阶段装配式建筑外墙逐步向保温装饰一体化发展,集成化程度较高,外墙构件安装完成后,涉及楼层外侧施工内容较少。目前行业常见的外脚手架包括悬挑式脚手架、附着式爬升脚手架、三角支撑外挂架等。
3.例如中国专利cn212129865u,公开了一种用于装配式建筑外墙的悬挑脚手架,包括支撑槽钢,所述支撑槽钢上设有安装槽,所述支撑槽钢上固定连接有固定板,所述固定板上设有固定孔,所述支撑槽钢的上方设有脚手钢管,所述支撑槽钢上设有用于实现脚手钢管固定的固定机构,所述脚手钢管上设有限位块,所述脚手钢管上设有用于实现脚手钢管转动的卡接机构,所述支撑槽钢的下端螺纹连接有支撑钢管,所述支撑槽钢内固定连接有多个螺纹固定杆,所述支撑槽钢内设有安装槽。该实用新型结构合理,通过设置卡接机构实现悬挑脚手架在进行墙体装配时的便捷拆卸过程,实现脚手架的快捷拆卸与安装过程,对避免对墙体安装的效率产生影响。
4.例如中国专利cn112324122a,公开了一种新型爬架系统。所述架体构架包括走道板、立杆、三角撑、内封闭机构、外防护网机构、水平桁架;所述三角撑设置于走道板的下方且处于相对的内立杆与外立杆之间,所述三角撑包括三角形主体及设置于三角形主体上端的转角件;所述外防护网机构的网片包括网片框架及钢板网及多个耳板,所述网片框架的左边框、右边框分别成型有u型槽、横向槽;多个所述导轨竖直并列设置于走道板的内侧,所述导轨结构采用铝合金一体化挤压成型;所述附着支撑模块包括多个新型附墙支座。该新型爬架系统的外防护网机构采用网片式结构且改进卸荷支顶器、同时附墙支座的防坠机构增设防坠转动块、同时采用钢铝结合式结构、使得爬架系统操作更方便且更安全可靠。
5.例如中国专利cn112443152a,公开了一种用于装配式建筑的模块化快装式卸料及外防护一体化系统,本系统包括钢平台;各层结构楼板处的外墙上均贯穿外墙墙体而设置有预留孔;拉接螺杆穿入预留孔内,且在预留孔两孔端处的拉接螺杆杆身处均螺纹配合有压紧螺母;悬挑段两侧布置吊耳,在吊耳与拉接螺杆的闭环状端部之间设置连接两者的牵引绳;本系统还包括支撑架,所述支撑架上布置安装孔,拉接螺杆穿入该安装孔并依靠压紧螺母将支撑架压紧和固定于预留孔处;支撑架顶部固接有起安全防护作用的网筛板状的外挂架。
6.通过现阶段行业应用现状,可总结得出:悬挑架脚手架需提前在特定楼层构件中留设预埋件,难以满足装配式建筑对于标准化的需求,附着式爬升脚手架多用于27层以上的装配式项目,且一般覆盖4个楼层作业面,自重偏大,难以满足小高层装配式建筑的业务需求;三角支撑外挂架需在灌浆完成 24h后才可通过塔吊及工人协同安装,影响楼层作业
进度,上述外架体系在装配式项目使用时均存在一定局限性,现阶段行业亟需一种针对装配式建筑特点与使用环境研发的外架体系。
技术实现要素:
7.本发明的目的是为了解决现有技术中存在的缺点,基于建筑行业内常见的外架体系进行的技术开发,使其能满足全预制外墙装配式建筑围护架体对于便捷性、高效性、经济性的要求。
8.为了实现上述目的,本发明采用了如下技术方案:一种用于装配式结构的轻量化和模块化自爬升外架系统,包括现浇楼板,所述现浇楼板的数量为三个,三个所述现浇楼板的一侧均设有预制外墙,所述现浇楼板与预制外墙之间一一对应通过斜支撑结构连接,所述预制外墙远离现浇楼板的一侧上设有三组爬升轨道,所述爬升轨道远离预制外墙的一侧设有围护架体,三组所述爬升轨道均通过自爬升动力机构与围护架体之间传动连接,所述爬升轨道包括n+1层轨道、层轨道和n-1层轨道,所述n+1层轨道、n层轨道和n-1层轨道分别对应三个预制外墙设置,所述n层轨道设置在n+1层轨道与n-1层轨道之间,每个所述预制外墙均通过穿墙螺杆连接有钢支座,所述钢支座连接有齿轨,所述齿轨与自爬升动力机构之间传动连接,每组所述爬升轨道均对应设置三组自爬升动力机构,所述自爬升动力机构包括连接缀板,所述连接缀板通过一号连接螺栓与围护架体之间连接,所述围护架体包括与连接缀板之间固定连接的支撑立柱,每组所述爬升轨道均对应设置一个支撑立柱,每个所述支撑立柱对应与三个连接缀板连接,所述支撑立柱上固定焊接有两个斜杆,所述斜杆的中间节段通过横杆与支撑立柱之间固定连接,所述斜杆远离支撑立柱的一端上连接有支撑骨架,所述支撑骨架的一端与支撑立柱之间垂直固定连接,所述支撑骨架的数量与支撑立柱对应,相邻两个所述支撑骨架之间固定焊接有走道骨架,所述走道骨架与支撑骨架之间的平面上安装有花纹钢板。
9.作为一种优选的实施方式,所述连接缀板通过二号连接螺栓连接有摇杆和棘轮,所述摇杆转动设置在连接缀板与二号连接螺栓之间,所述棘轮转动设置在连接缀板之间的二号连接螺栓上,所述摇杆远离二号连接螺栓的一端上连接有固定螺杆,所述固定螺杆上连接有棘爪。
10.采用上述进一步方案的有益效果是:以便于本发明的定位。
11.作为一种优选的实施方式,所述棘轮的与齿轨之间啮合。
12.采用上述进一步方案的有益效果是:以便于本发明的爬升定位。
13.作为一种优选的实施方式,其中两个所述支撑立柱上的连接缀板分别设置在斜杆与横杆和爬升轨道连接节点之间的支撑立柱上,其余一个所述连接缀板设置在另外两个连接缀板之间的支撑立柱上。
14.采用上述进一步方案的有益效果是:以便于本发明使用和固定。
15.作为一种优选的实施方式,所述走道骨架远离支撑立柱的一侧边上安装有铁制踢脚板。
16.采用上述进一步方案的有益效果是:起到防止踩空的功能。
17.作为一种优选的实施方式,所述铁制踢脚板两端对应的支撑骨架上垂直固定焊接有立柱,相邻两个所述立柱之间连接有多个角钢,所述角钢与立柱之间的平面内安装有钢
丝方格网片。
18.采用上述进一步方案的有益效果是:起到防护的效果。
19.作为一种优选的实施方式,每个所述支撑骨架远离铁制踢脚板的一侧边上转动连接有百叶板。
20.采用上述进一步方案的有益效果是:百叶板的设置可以使得走道面竖向封闭。
21.作为一种优选的实施方式,处于上方位置的所述支撑骨架下方连接有吊点。
22.采用上述进一步方案的有益效果是:吊点可以通过悬挂牵引绳将n-1层轨道回收、转运。
23.与现有技术相比,本发明的优点和积极效果在于,
24.1、具有通用性的优势,可普遍适用于不同楼层的装配式建筑项目;
25.2、具有轻量化的优势,较常见附着式爬升脚手架减重60%以上;
26.3、具有模块化的优势,采用标准化模块设计,可周转使用于多个装配式项目;
27.4、通过动力设备提升标准单元架体,可实现自爬升功能,若采用定制化轨道提升动力设备,可实现无人化、智能化及一键爬升等功能;
28.5、可有效提高外架安装的便捷性,无需等待灌浆强度,无需占用塔吊时间;
29.6、造价较传统附着式爬升脚手架更为经济,且安全性能够得到保证。
附图说明
30.图1为本发明一种用于装配式建筑的轻量化和模块化自爬升外架系统的整体结构示意图;
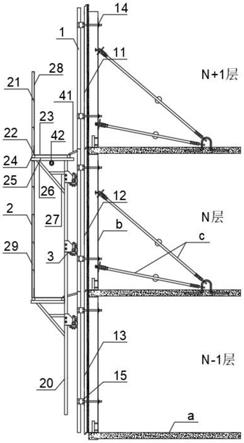
31.图2为本发明一种用于装配式建筑的轻量化和模块化自爬升外架系统的外立面结构示意图;
32.图3为本发明一种用于装配式建筑的轻量化和模块化自爬升外架系统的外立面三维示意图;
33.图4为本发明一种用于装配式建筑的轻量化和模块化自爬升外架系统的自爬升动力装置结构示意图;
34.图5为本发明一种用于装配式建筑的轻量化和模块化自爬升外架系统的自爬升动力装置三维示意图;
35.图6为本发明一种用于装配式建筑的轻量化和模块化自爬升外架系统的爬升轨道结构示意图;
36.图7为本发明一种用于装配式建筑的轻量化和模块化自爬升外架系统的钢支座三维示意图;
37.图8为本发明一种用于装配式建筑的轻量化和模块化自爬升外架系统的架体提升示意图;
38.附图中,各标号所代表的部件列表如下:
39.1、爬升轨道;11、n+1层轨道;12、n层轨道;13、n-1层轨道;14、穿墙螺杆;15、钢支座;16、齿轨;
40.2、围护架体;20、支撑立柱;21、角钢;22、铁制踢脚板;23、花纹钢板;24、走道骨架;25、支撑骨架;26、斜杆;27、横杆;28、钢丝方格网片;29、立柱;
41.3、自爬升动力机构;31、连接缀板;32、一号连接螺栓;33、二号连接螺栓;34、摇杆;35、固定螺杆;36、棘爪;37、棘轮;
42.41、百叶板;42、吊点;
43.a、现浇楼板;b、预制外墙;c、斜支撑结构。
具体实施方式
44.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
45.实施例1
46.如图1、图3、图5、图6、图7和图8所示,本发明提供一种技术方案:一种用于装配式结构的轻量化和模块化自爬升外架系统,包括现浇楼板a,现浇楼板a的数量为三个,三个现浇楼板a的一侧均设有预制外墙b,现浇楼板 a与预制外墙b之间一一对应通过斜支撑结构c连接,其特征在于:预制外墙 b远离现浇楼板a的一侧上设有三组爬升轨道1,爬升轨道1远离预制外墙b 的一侧设有围护架体2,三组爬升轨道1均通过自爬升动力机构3与围护架体 2之间传动连接,爬升轨道1包括n+1层轨道11、n层轨道12和n-1层轨道 13,n+1层轨道11、n层轨道12和n-1层轨道13分别对应三个预制外墙b设置,n层轨道12设置在n+1层轨道11与n-1层轨道13之间,每个预制外墙 b均通过穿墙螺杆14连接有钢支座15,钢支座15连接有齿轨16。
47.在本实施例中,通过设置的爬升轨道1将本发明安装在预制外墙b上,并且通过设置的穿墙螺杆14与钢支座15的连接方式使得爬升轨道1整体的安装与预制外墙b之间更加紧密,确保了起到轨道作用的齿轨16的连接更加稳固,钢支座15内设置垫木,并内置焊接螺母,无需另外安装。
48.实施例2
49.如图1、图3、图4和图8所示,齿轨16与自爬升动力机构3之间传动连接,每组爬升轨道1均对应设置三组自爬升动力机构3,自爬升动力机构3 包括连接缀板31,连接缀板31通过二号连接螺栓33连接有摇杆34和棘轮 37,棘轮37的与齿轨16之间啮合,摇杆34转动设置在连接缀板31与二号连接螺栓33之间,棘轮37转动设置在连接缀板31之间的二号连接螺栓33 上,摇杆34远离二号连接螺栓33的一端上连接有固定螺杆35,固定螺杆35 上连接有棘爪36。
50.在本实施例中,棘爪36的设置方式不影响棘轮37顺时针转动,同时可以阻止棘轮37逆时针转动,该设计使得棘爪36可以对棘轮37的转动位置进行控制,防止其出现逆转导致装置下落的情况出现,棘轮37咬合在爬升轨道 1的齿轨16的设计方便了自爬升动力机构3整体的爬升,连接缀板31由一号连接螺栓32固定于支撑立柱20,且为梯形缀板,棘轮37通过外置传动电机进行转动,带动围护架体2提升。
51.实施例3
52.如图1、图2、图3、图5、和图8所示,连接缀板31通过一号连接螺栓 32与围护架体2之间连接,围护架体2包括与连接缀板31之间固定连接的支撑立柱20,其中两个支撑立柱20
上的连接缀板31分别设置在斜杆26与横杆 27和爬升轨道1连接节点之间的支撑立柱20上,其余一个连接缀板31设置在另外两个连接缀板31之间的支撑立柱20上,每组爬升轨道1均对应设置一个支撑立柱20,每个支撑立柱20对应与三个连接缀板31连接,支撑立柱 20上固定焊接有两个斜杆26,斜杆26的中间节段通过横杆27与支撑立柱20 之间固定连接,斜杆26远离支撑立柱20的一端上连接有支撑骨架25,支撑骨架25的一端与支撑立柱20之间垂直固定连接,支撑骨架25的数量与支撑立柱20对应,相邻两个支撑骨架25之间固定焊接有走道骨架24,走道骨架24与支撑骨架25之间的平面上安装有花纹钢板23,走道骨架24远离支撑立柱20的一侧边上安装有铁制踢脚板22,铁制踢脚板22两端对应的支撑骨架 25上垂直固定焊接有立柱29,相邻两个立柱29之间连接有多个角钢21,角钢21与立柱29之间的平面内安装有钢丝方格网片28。
53.在本实施例中,围护架体2覆盖两个作业层,架体高度与楼层结构高度相匹配,围护架体2以1m、1.5m为模数进行模块化拼装,方便本发明的安装,外架走道由走道骨架24、花纹钢板23组成,采用焊接将其连接,走道满铺花纹钢板23,提高平台踩踏部分的摩擦系数,降低滑倒的几率,铁制踢脚板22 设置于围栏底部,满布于外架行走方向,用以防止平台上物体坠落,并且还可以防止工人踩空发生危险的情况。
54.实施例4
55.如图1、图3和图8所示,每个支撑骨架25远离铁制踢脚板22的一侧边上转动连接有百叶板41,处于上方位置的支撑骨架25下方连接有吊点42。
56.在本实施例中,外架走道由走道骨架24上连接百叶板41,使走道面竖向封闭,防止坠物伤人,吊点42通过悬挂牵引绳将n-1层轨道13回收、转运。
57.工作原理:
58.如图1-8所示,首先加工制作围护架体2,将角钢21按照600mm间距水平焊接在立柱29上,立柱间距为1000mm或1500mm,组成防护围栏骨架,而后将铁制踢脚板22、钢丝方格网片28四周电焊至立柱29及角钢21上,然后开始组装外架走道,外架走道的走道骨架24首尾焊接组成正方形标准单元骨架,将走道处花纹钢板23与走道骨架24进行焊接连接,随后组装支撑架,首尾焊接支撑骨架25,组成正方形标准单元骨架,与斜杆26采用螺栓进行连接固定,与支撑立柱20的接缝处采用双面焊接连接,横杆27连接斜杆26、支撑立柱20,组成稳定的三角支撑标准单元,防护围栏、外架走道、支撑架均覆盖两个作业楼层工作面,支撑立柱20将上下两工作面连接为整体;待作业层楼板a混凝土强度满足设计要求,开始各楼层装配式外墙b吊装,在各楼层装配式外墙b上设置贯穿墙体的预留穿墙洞口,预制外墙b与斜支撑c 安装加固后,使用穿墙螺杆14从作业内部穿过预留洞口,连接并拧紧爬升轨道钢支座15内设置的螺母,从而使爬升轨道1固定于预制外墙b外侧,爬升轨道1的内侧设有齿口16,预制外墙b上的每道轨道设置两处穿墙螺杆14,通常覆盖n+1层轨道11、n层轨道12、n-1层轨道13;组装自爬升动力装置 3,连接缀板31通过一号连接螺栓32,将自爬升动力装置3固定于支撑立柱 20,摇杆34、棘爪36、棘轮37通过螺栓连接;
59.上述步骤完成后,将组装完成的围护架体2、自爬升动力装置3、爬升轨道1拼装至施工作业楼层,并翻下百叶板41,组成封闭的建筑外架;当需将架体进行提升时,翻起百叶板41,将n-1层轨道13的牵引绳悬挂至吊点42 位置,然后启动自爬升动力装置3的外置传动电机,使棘轮37顺时针转动,咬合爬升轨道1的齿口16,使其架体进行爬升,待爬升至图7中
提升结束所示位置后,停止外置传动电机运转,随后卸下n-1层轨道13的二号连接螺栓 33,翻下百叶板41,通过吊点42处的牵引绳,将n-1层轨道13转运至下一楼层进行周转使用,完成架体组装、提升的流程。
60.以上,仅是本发明的较佳实施例而已,并非是对本发明作其它形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例应用于其它领域,但是凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本发明技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1