一种楼地面平整度控制装置及控制方法与流程
1.本发明涉及建筑施工技术领域,具体为一种楼地面平整度控制装置及控制方法。
背景技术:
2.在建筑工程施工过程中,尤其是在楼地面施工中,平整度的精确控制是很重要,也是很难的,而且对后期的装饰装修影响很大;传统做法是拉线、做灰饼等,对于小范围的施工,误差较小,但对于大面积施工,往往控制难、误差大、问题多,后期整改费时费力,成本较高,所以如何精确控制地坪平整度,提高施工效率,尤其是大面积地坪施工,是本领域技术人员一直在思考的难题。
技术实现要素:
3.本发明的目的在于:提供了一种楼地面平整度控制装置及控制方法,解决了现有楼地面平整度难以控制的问题。
4.本发明的目的通过下述技术方案来实现:
5.一种楼地面平整度控制装置,包括左右两侧的支架,支架行走在纵向的轨道上,左右的支架之间连接有横向的连杆,连杆上设有沿轴向滑动的刮板,刮板沿纵向布置或倾斜布置。
6.进一步的,还包括推杆,推杆与刮板卡设配合。
7.进一步的,所述的连杆包括至少三节的连杆段,端部的连杆段与支架固定或可拆卸连接,相邻两连杆段之间可拆卸连接。
8.进一步的,所述的连杆设有三根,三根连杆在横向的投影为三角形布置。
9.进一步的,所述的刮板为矩形板。
10.进一步的,所述的刮板的顶部设有插销,插销与推杆卡设配合。
11.进一步的,所述的刮板包括至少两块,刮板的一端设有插板,刮板的另一端设有与插板相匹配的插槽,相邻两刮板之间通过插板插入插槽连接。
12.进一步的,所述的推杆为l形,推杆的短端设有与刮板配合的卡设结构。
13.进一步的,所述的推杆包括至少两节的推杆段,相邻两推杆段之间可拆卸连接。
14.进一步的,所述的可拆卸连接为螺纹的连接结构。
15.进一步的,所述的支架包括承力块,连杆连接在承力块上,承力块的下部设有竖向可调的立杆,立杆的下部与滚轮连接,滚轮行走在轨道上。
16.进一步的,所述的立杆的上部为穿过承力块的螺纹段,螺纹段上设有夹持承力块的螺母。
17.进一步的,所述的轨道为开口朝下的角钢。
18.一种楼地面平整度控制方法,包括上述的楼地面平整度控制装置,包括如下步骤:将轨道布设在固定构件上,保证轨道的安装稳定,支架沿着轨道行走至待平整区域;保证支架位置固定后,通过推杆推移刮板沿着连杆滑移,刮板对该位置处下方的物料进行刮平;然
后移动支架至下一位置处,保证支架位置固定后,通过推杆推移刮板沿着连杆滑移,刮板对该位置处下方的物料进行刮平;重复多次,完成整个待平整区域的平整操作。
19.本发明的有益效果:
20.1.利用横向布置的连杆对刮板进行导向,实现刮板沿横向方向的水平滑移,刮板的下端面对施工面进行刮平,保证楼地面的平整度。
21.2.支架可以在轨道上行走,调整刮板的纵向位置,扩大刮板作业范围,利用同一组件,实现大面积的刮平操作,保证整体的平整度。
22.3.支架的高度可以调整,连杆和推杆的长度可以更换,刮板的宽度可以增加,以适用不同的作业情况,具有良好的适用性。
23.前述本发明主方案及其各进一步选择方案可以自由组合以形成多个方案,均为本发明可采用并要求保护的方案;并且本发明,(各非冲突选择)选择之间以及和其他选择之间也可以自由组合。本领域技术人员在了解本方案后根据现有技术和公知常识可明了有多种组合,均为本发明所要保护的技术方案,在此不做穷举。
附图说明
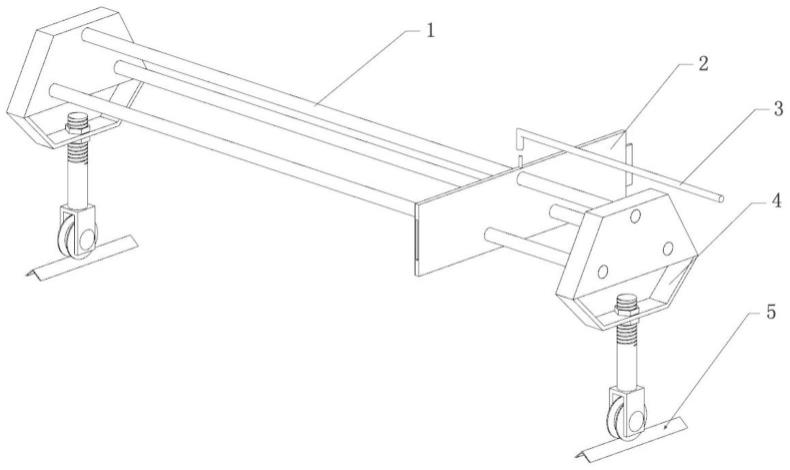
24.图1是本发明结构示意图。
25.图2是本发明连杆结构示意图。
26.图3是本发明刮板结构示意图。
27.图4是本发明支架结构示意图。
28.图中:1-连杆,2-刮板,3-推杆,4-支架,5-轨道;11-连杆段,12-螺纹;21-插销,22-插板,23-插槽;41-承力块,42-立杆,43-滚轮。
具体实施方式
29.下面结合具体实施例和附图对本发明作进一步的说明。
30.实施例1
31.参考图1~图4所示,一种楼地面平整度控制装置,包括连杆1、刮板2、推杆3、支架4和轨道5。
32.支架4为左右两侧对称布置的两个,左右的支架4之间连接有横向的连杆1,连杆1将两个支架4连接为整体框架。连杆1上设有沿轴向滑动的刮板2,刮板2沿纵向布置或倾斜布置,通过刮板2在连杆1上进行横向滑移运动,利用刮板2的下端对施工面进行刮平操作,倾斜布置的刮板2能够将物料向侧部推移,避免物料多余的物料从端部洒落,造成资源浪费。
33.支架4行走在纵向的轨道5上,通过支架4在轨道5上行走,带动刮板2调整纵向位置,实现刮板2的大面积作业。推杆3与刮板2卡设配合,工人通过把持推杆3,对刮板2进行推动,驱动刮板2进行横向滑移。
34.连杆1可自由拼接,连杆1包括至少三节的连杆段11,端部的连杆段11与支架4焊接连接或通过螺纹12连接,相邻两连杆段11之间通过螺纹12连接。根据施工区域面积实现多节连杆段的自由组合,改变连杆1的长度大小,以满足施工需求。
35.连杆1设有三根,三根连杆1在横向的投影为三角形布置,通过对刮板2的三点滑动
定位,避免刮板2发生倾斜,保证刮板2的滑移精度。
36.刮板2为矩形板,刮板2的下端为刮平接触部位。刮板2的顶部焊接有插销21,推杆3为l形,推杆3的短端设有与插销21配合的卡设孔,将卡设孔插入插销21上,实现推杆3与刮板2的临时卡设固定,施工完成后将推杆3拔出即可。
37.刮板2可自由拼接,刮板2包括至少两块,刮板2的一端焊接有插板22,刮板2的另一端设有与插板22相匹配的插槽23,相邻两刮板2之间通过插板22插入插槽23连接。每个刮板2配合一组连杆1、支架4,通过刮板2之间的拼接,扩大刮板2的作业面积,一次同时推动多个刮板2,提高了作业效率。
38.推杆3包括至少两节的推杆段,相邻两推杆段之间通过螺纹12连接。推杆3采用与连杆1相同的连接方式,实现多节的推杆段的自由组合。
39.支架4包括立杆42、滚轮43和六边形结构的承力块41,承力块41的上部为实心结构,实现连杆1连接在承力块41上,承力块41的下部为空心轮廓结构,实现立杆42的穿设。立杆42的上部为穿过承力块41的螺纹段,螺纹段上设有夹持承力块41的螺母,通过螺母的旋转,能够改变立杆42的高度,实现支架4高度的调节,从而调整刮板2的刮平高度。
40.立杆42的下部与滚轮43连接,滚轮43行走在轨道5上,轨道5为开口朝下的角钢。轨道5对滚轮43进行支撑,滚轮43在轨道5上滚动行走,实现支架4纵向的灵活移动。
41.本发明的工作流程:使用时,通过将轨道布设于已完工楼地面,进行地坪施工,或放置于钢筋架体上面,进行混凝土面平整度控制作业,借助推杆横向推动刮板实现对平整度的控制,可依据施工面积大小增加刮板拼接长度、连杆拼接长度,依据现场标高调整刮平高度,满足多条件施工。
42.实施例2
43.一种楼地面平整度控制方法,包括实施例1的楼地面平整度控制装置,包括如下步骤:将轨道5布设在固定构件上,保证轨道5的安装稳定,支架4沿着轨道5行走至待平整区域;保证支架4位置固定后,通过推杆3推移刮板2沿着连杆1滑移,刮板2对该位置处下方的物料进行刮平;然后移动支架4至下一位置处,保证支架4位置固定后,通过推杆3推移刮板2沿着连杆1滑移,刮板2对该位置处下方的物料进行刮平;重复多次,完成整个待平整区域的平整操作。
44.前述本发明基本例及其各进一步选择例可以自由组合以形成多个实施例,均为本发明可采用并要求保护的实施例。本发明方案中,各选择例,与其他任何基本例和选择例都可以进行任意组合。
45.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1