一种自动补料抹水泥墙面机器人的制作方法
1.本发明涉及建筑施工用机器人领域,尤其是涉及一种自动补料抹水泥墙面机器人。
背景技术:
2.在住宅建设过程中,在墙面上抹水泥是一项必不可少的工序,若采用人工抹水泥,则需要花费大量人力,为了节省人力,市场上出现了一种自动补料抹水泥墙面机器人,其可以代替人工抹水泥。
3.公告号为cn109537855b的中国专利公开了一种自动补料抹水泥墙面机器人,包括升降抹水泥墙板、齿轮齿条组合、补料组合、固定移动组合,机器人安装有轮子,机器人可以灵活的移动,补料组合由主壳体、动力杆、弹性薄膜、单向球阀组成,主壳体安装于动力杆外侧,主壳体与动力杆连接,主壳体安装于弹性薄膜外侧,主壳体与弹性薄膜连接,主壳体安装于单向球阀外侧,主壳体与单向球阀连接,动力杆安装于弹性薄膜右侧,动力杆安装于单向球阀右侧,弹性薄膜安装于单向球阀右侧,主壳体由动力腔室、压力腔室、入口、出口组成,动力腔室安装于压力腔室右侧,动力腔室与压力腔室连接,动力腔室安装于入口右侧,动力腔室安装于出口右侧,压力腔室安装于入口右侧,压力腔室与入口连接,压力腔室安装于出口右侧,压力腔室与出口连接,入口安装于出口下侧,入口与出口连接;动力杆由动力轴、从动偏心轮、偏心杆、连杆、活塞组成,压力腔室内压力发生变化,活塞向右运动时,压力腔室内压力减小,弹性薄膜向右凸起,单向球阀向右运动,水泥从入口进入。
4.上述自动补料抹水泥墙面机器人虽然能够代替人工抹水泥,但是在主壳体吸入水泥时,水泥直接从入口进入到主壳体内,入口处无法对进入的水泥进行搅拌,水泥的流动性容易受到影响,
技术实现要素:
为了改善入口处水泥的流动性容易受到影响的问题,本技术提供一种自动补料抹水泥墙面机器人。
5.本技术提供的一种自动补料抹水泥墙面机器人采用如下的技术方案:一种自动补料抹水泥墙面机器人,包括补料组合,所述补料组合的入口处连接有搅拌装置,搅拌装置包括搅拌箱、水平搅拌组件、竖直搅拌组件、用于驱动竖直搅拌组件升降的第一驱动装置和用于驱动水平搅拌组件转动的第二驱动装置,搅拌箱连接在补料组合的入口处,水平搅拌组件和竖直搅拌组件均设置在搅拌箱内,竖直搅拌组件连接第一驱动装置,水平搅拌组件连接第二驱动装置。
6.通过采用上述技术方案,当水泥进入到补料组合的入口时,先经过搅拌箱,此时第一驱动装置驱动竖直搅拌组件对水泥进行搅拌,第二驱动装置驱动水平搅拌组件对水泥搅拌,竖直搅拌组件和水平搅拌组件配合能够对即将进入到补料组合入口处的水泥从不同方向搅拌,改善了入口处水泥的流动性容易受到影响的问题。
7.可选的,所述搅拌箱上连接有安装架,第一驱动装置包括第一电机、第一不完全齿轮、第二不完全齿轮和双面齿条,第一不完全齿轮和第二不完全齿轮均转动连接在安装架上,第一电机设置在安装架上,第一不完全齿轮和第二不完全齿轮均与第一电机联动,第一不完全齿轮和第二不完全齿轮的转动方向相同,双面齿条滑动连接在安装架上,第一不完全齿轮和第二不完全齿轮位于双面齿条的两侧,当第一不完全齿轮与双面齿条啮合时,第二不完全齿轮与双面齿条分离,当第二不完全齿轮与双面齿条啮合时,第一不完全齿轮与双面齿条分离,竖直搅拌组件连接在双面齿条上。
8.通过采用上述技术方案,第一电机在工作状态下驱动第一不完全齿轮和第二不完全齿轮转动,当第一不完全齿轮与双面齿条啮合时,第二不完全齿轮与双面齿条分离,当第二不完全齿轮与双面齿条啮合时,第一不完全齿轮与双面齿条分离,因此,第一不完全齿轮和第二不完全齿轮配合能够对双面齿条进行升降操作,在双面齿条升降过程中,竖直搅拌组件随着双面齿条一起升降,进行升降操作的竖直搅拌组件能够对搅拌箱内的水泥进行搅拌,从而改善了入口处水泥的流动性容易受到影响的问题。
9.可选的,所述搅拌箱底部与竖直搅拌组件之间连接有弹簧,当双面齿条向下移动时,弹簧被压缩。
10.通过采用上述技术方案,当双面齿条向下移动时,弹簧被压缩,当双面齿条带动竖直搅拌组件向上移动时,弹簧对竖直搅拌组件提供弹力,以便减小搅拌箱内的水泥对竖直搅拌组件的上升过程产生的阻碍。
11.可选的,所述竖直搅拌组件包括竖直搅拌杆和蛇形搅拌叶,竖直搅拌杆连接在第一驱动装置上,蛇形搅拌叶连接在竖直搅拌杆上。
12.通过采用上述技术方案,在蛇形搅拌叶和竖直搅拌杆升降过程中,蛇形搅拌叶能够更好对水泥进行搅拌,以便提高搅拌效果。
13.可选的,所述水平搅拌组件设置为两组,水平搅拌组件位于竖直搅拌组件的两侧,水平搅拌组件包括水平搅拌杆和水平搅拌叶片,水平搅拌杆转动连接在搅拌箱侧壁上,水平搅拌叶片设置在水平搅拌杆上,水平搅拌杆的一端贯穿搅拌箱侧壁与第二驱动装置相连。
14.通过采用上述技术方案,将水平搅拌组件设置为两组,两组水平搅拌组件与竖直搅拌组件配合使用,能够提高对水泥的搅拌效率,对水泥的搅拌效果更好。
15.可选的,两组所述水平搅拌组件共用一个第二驱动装置,第二驱动装置包括第二电机、同步带、支撑同步带轮、传动同步带轮、第一锥齿轮和第二锥齿轮,支撑同步带轮转动连接在搅拌箱的四个角处,搅拌箱侧壁上转动连接有传动杆,传动同步带轮连接在传动杆上,同步带套设在支撑同步带轮和传动同步带轮上,第二电机设置在搅拌箱上,第二电机与支撑同步带轮或传动同步带轮联动,第一锥齿轮设置在传动杆上,第二锥齿轮设置在水平搅拌杆上,第一锥齿轮与第二锥齿轮啮合。
16.通过采用上述技术方案,第二电机在工作状态下带动与其联动的支撑同步带轮或传动同步带轮转动,通过同步带、支撑同步带轮和传动同步带轮配合,搅拌箱上的传动杆同时转动,传动杆在转动过程中通过第一锥齿轮和第二锥齿轮的配合带动水平搅拌杆转动,从而实现一个第二驱动装置驱动两组水平搅拌组件的目的。
17.可选的,所述水平搅拌杆位于搅拌箱外部的一端设有安装孔,所述水平搅拌叶片
连接水平搅拌杆的一端设有插入孔,水平搅拌杆上设有连通安装孔的中间孔,中间孔与插入孔连通,搅拌箱上转动连接有同步杆,同步杆插入到安装孔内,同步杆上连接有同步分杆,同步分杆穿过中间孔进入到插入孔内,所述同步杆上连接有第一同步齿轮,所述搅拌箱上滑动连接有同步轴,同步轴上转动连接有第二同步齿轮,搅拌箱上连接有第三电机,第三电机上连接有第三同步齿轮,第二同步齿轮位于第一同步齿轮和第三同步齿轮中间,第二同步齿轮与第一同步齿轮啮合,第二同步齿轮与第三同步齿轮啮合,且第二电机处于工作状态时,第二同步齿轮与第一同步齿轮分离,第二同步齿轮与第三同步齿轮分离。
18.通过采用上述技术方案,当同步带出现松弛现象,无法带动传动同步带轮转动时,关闭第二电机,将同步带取下,移动同步轴,使第二同步齿轮与第一同步齿轮啮合,第二同步齿轮与第三同步齿轮啮合,启动第三电机,第三电机带动第三同步齿轮转动,通过第一同步齿轮、第二同步齿轮和第三同步齿轮的配合,使同步杆发生转动,同步杆通过同步分杆带动水平搅拌叶片转动,从而对水泥进行搅拌,避免同步带松弛,影响对水泥进行搅拌。
19.可选的,所述搅拌箱上连接有气缸,气缸的活塞杆连接同步轴。
20.通过采用上述技术方案,气缸在工作状态可以将同步轴移动到适当位置,并且可以避免同步轴在使用时发生移动。
21.综上所述,本技术包括以下至少一种有益技术效果:1.当水泥进入到补料组合的入口时,先经过搅拌箱,此时第一驱动装置驱动竖直搅拌组件对水泥进行搅拌,第二驱动装置驱动水平搅拌组件对水泥搅拌,竖直搅拌组件和水平搅拌组件配合能够对即将进入到补料组合入口处的水泥从不同方向搅拌,改善了入口处水泥的流动性容易受到影响的问题;2.将水平搅拌组件设置为两组,两组水平搅拌组件与竖直搅拌组件配合使用,能够提高对水泥的搅拌效率,对水泥的搅拌效果更好;3.当同步带出现松弛现象,无法带动传动同步带轮转动时,关闭第二电机,将同步带取下,移动同步轴,使第二同步齿轮与第一同步齿轮啮合,第二同步齿轮与第三同步齿轮啮合,启动第三电机,第三电机带动第三同步齿轮转动,通过第一同步齿轮、第二同步齿轮和第三同步齿轮的配合,使同步杆发生转动,同步杆通过同步分杆带动水平搅拌叶片转动,从而对水泥进行搅拌,避免同步带松弛,影响对水泥进行搅拌。
附图说明
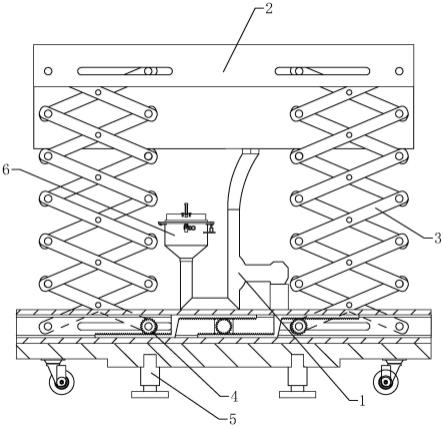
22.图1是本技术实施例中用于体现一种自动补料抹水泥墙面机器人的结构示意图。
23.图2是本技术实施例中用于体现搅拌装置的结构示意图。
24.图3是本技术实施例中用于体现第二驱动装置的结构示意图。
25.图4是本技术实施例中用于体现第一驱动装置的结构示意图。
26.图5是本技术实施例中用于体现水平搅拌杆与同步杆之间位置关系的结构示意图。
27.图6是图5的a部放大图。
28.图7是本技术实施例中用于体现气缸与第二同步齿轮之间位置关系的结构示意图。
29.附图标记说明:
1、补料组合;2、抹水泥板;3、升降杆;4、齿轮齿条组合;5、固定移动组合;6、搅拌箱;7、水平搅拌组件;8、竖直搅拌组件;9、密封板;10、进料口;11、安装架;12、第一电机;13、第一不完全齿轮;14、第二不完全齿轮;15、双面齿条;16、第一驱动轴;17、第二驱动轴;18、第三驱动轴;19、传动齿轮;20、滑移口;21、竖直搅拌杆;22、蛇形搅拌叶;23、弹簧;24、横杆;25、水平搅拌杆;26、水平搅拌叶片;27、第二电机;28、同步带;29、支撑同步带轮;30、传动同步带轮;31、第一锥齿轮;32、第二锥齿轮;33、支撑杆;34、传动杆;35、基座;36、安装孔;37、中间孔;38、插入孔;39、同步杆;40、同步轮毂;41、同步分杆;42、第一同步齿轮;43、同步轴;44、滑移架;45、气缸;46、第二同步齿轮;47、第三电机;48、第三同步齿轮;49、固定架。
具体实施方式
30.本技术实施例公开一种自动补料抹水泥墙面机器人。
31.参照图1,一种自动补料抹水泥墙面机器人包括补料组合1、抹水泥板2、升降杆3、用于驱动升降杆3升降的齿轮齿条组合4、固定移动组合5和搅拌装置,齿轮齿条组合4设置在固定移动组合5上,升降杆3连接在齿轮齿条组合4上,抹水泥板2连接在升降杆3上,补料组合1设置在齿轮齿条组合4上。
32.参照图2,搅拌装置连接在补料组合1的入口处,搅拌装置包括搅拌箱6、水平搅拌组件7、竖直搅拌组件8、用于驱动竖直搅拌组件8升降的第一驱动装置和用于驱动水平搅拌组件7转动的第二驱动装置。
33.参照图1、图2和图3,搅拌箱6底部呈漏斗状设置,搅拌箱6底部连接在补料组合1的入口处,搅拌箱6的开口处连接有密封板9,密封板9上设有进料口10,竖直搅拌组件8设置在搅拌箱6内,竖直搅拌组件8连接第一驱动装置。
34.参照图3和图4,密封板9上连接有安装架11,第一驱动装置包括第一电机12、第一不完全齿轮13、第二不完全齿轮14和双面齿条15。
35.参照图3,安装架11上转动连接有第一驱动轴16、第二驱动轴17和第三驱动轴18,第一不完全齿轮13连接在第一驱动轴16上,第二不完全齿轮14连接在第三驱动轴18上,第一电机12设置在安装架11上,第一电机12与第二驱动轴17相连,第一不完全齿轮13和第二不完全齿轮14均与第一电机12联动,第一不完全齿轮13和第二不完全齿轮14的转动方向相同,第一驱动轴16、第二驱动轴17和第三驱动轴18上均连接有传动齿轮19,第一驱动轴16、第二驱动轴17和第三驱动轴18上的传动齿轮19相互啮合,以便实现传动目的。
36.参照图2和图4,双面齿条15滑动连接在安装架11上,安装架11和密封板9上设有滑移口20,双面齿条15贯穿滑移口20并与滑移口20滑动配合,第一不完全齿轮13和第二不完全齿轮14位于双面齿条15的两侧,当第一不完全齿轮13与双面齿条15啮合时,第二不完全齿轮14与双面齿条15分离,当第二不完全齿轮14与双面齿条15啮合时,第一不完全齿轮13与双面齿条15分离。
37.参照图2和图4,竖直搅拌组件8连接在双面齿条15位于搅拌箱6内的一端,竖直搅拌组件8包括竖直搅拌杆21和蛇形搅拌叶22,竖直搅拌杆21连接在双面齿条15上,蛇形搅拌叶22连接在竖直搅拌杆21上,搅拌箱6底部与竖直搅拌杆21之间连接有弹簧23,搅拌箱6底部连接有横杆24,弹簧23的一端连接横杆24,另一端连接竖直搅拌杆21,当双面齿条15向下移动时,弹簧23被压缩。
38.第一电机12在工作状态下带动第二驱动轴17转动,第二驱动轴17通过传动齿轮19之间的配合带动第一驱动轴16和第三驱动轴18同时转动,且第一驱动轴16和第三驱动轴18的转动方向相同,第一驱动轴16带动第一不完全齿轮13转动,第三驱动轴18带动第二不完全齿轮14转动,从而使第一不完全齿轮13和第二不完全齿轮14的转动方向相同,在第一不完全齿轮13和第二不完全齿轮14转动过程中,当第一不完全齿轮13与双面齿条15啮合时,第一不完全齿轮13驱动双面齿条15向下移动,双面齿条15带动竖直搅拌杆21和蛇形搅拌叶22向下移动,弹簧23被压缩,当第一不完全齿轮13与双面齿条15分离后,第二不完全齿轮14与双面齿条15啮合,第二不完全齿轮14驱动双面齿条15向上移动,此时双面齿条15带动竖直搅拌杆21和蛇形搅拌叶22向上移动,在此过程中,弹簧23对竖直搅拌杆21施力,从而使竖直搅拌杆21的上升过程更加顺畅。
39.参照图2,水平搅拌组件7设置在搅拌箱6内,水平搅拌组件7设置为两组,水平搅拌组件7位于竖直搅拌组件8的两侧,水平搅拌组件7包括水平搅拌杆25和水平搅拌叶片26,水平搅拌杆25转动连接在搅拌箱6侧壁上,水平搅拌叶片26设置在水平搅拌杆25上,水平搅拌杆25的一端贯穿搅拌箱6侧壁与第二驱动装置相连,且两组所述水平搅拌组件7共用一个第二驱动装置。
40.参照图2和图3,第二驱动装置包括第二电机27、同步带28、支撑同步带轮29、传动同步带轮30、第一锥齿轮31和第二锥齿轮32,搅拌箱6的四个角处转动连接有支撑杆33,支撑同步带轮29连接在支撑杆33上,搅拌箱6连接水平搅拌杆25的侧壁上转动连接有传动杆34,传动同步带轮30连接在传动杆34上,同步带28套设在支撑同步带轮29和传动同步带轮30上,第二电机27通过基座35设置在搅拌箱6上,第二电机27与支撑同步带轮29或传动同步带轮30联动,本实施例汇总,第二电机27与一个支撑杆33相连,第一锥齿轮31设置在传动杆34上,第二锥齿轮32设置在水平搅拌杆25上,第一锥齿轮31与第二锥齿轮32啮合。
41.第二电机27在工作状态下带动与其相连的支撑杆33转动,支撑杆33带动支撑同步带轮29转动,通过支撑同步带轮29、传动同步带轮30和同步带28之间的配合,从而使支撑同步带轮29和传动同步带轮30同时转动,传动同步带轮30在转动过程中带动传动杆34转动,传动杆34通过第一锥齿轮31和第二锥齿轮32的配合带动水平搅拌杆25转动,从而实现一个第二驱动装置同时驱动两组水平搅拌组件7转动的目的。
42.参照图2、图5和图6,水平搅拌杆25位于搅拌箱6外部的一端设有安装孔36,水平搅拌叶片26连接水平搅拌杆25的一端设有插入孔38,水平搅拌杆25上设有连通安装孔36的中间孔37,中间孔37与插入孔38连通,搅拌箱6上通过固定架49转动连接有同步杆39,同步杆39插入到安装孔36内,同步杆39上连接有同步轮毂40,同步轮毂40上连接有同步分杆41,同步分杆41穿过中间孔37进入到插入孔38内。
43.参照图2、图5和图7,同步杆39上连接有第一同步齿轮42,搅拌箱6上滑动连接有同步轴43,搅拌箱6上连接有滑移架44和气缸45,同步轴43贯穿滑移架44并与滑移架44滑动配合,气缸45的活塞杆连接同步轴43,同步轴43上转动连接有第二同步齿轮46,搅拌箱6上连接有第三电机47,第三电机47上连接有第三同步齿轮48,第二同步齿轮46位于第一同步齿轮42和第三同步齿轮48中间,第二同步齿轮46与第一同步齿轮42啮合,第二同步齿轮46与第三同步齿轮48啮合,且第二电机27处于工作状态时,第二同步齿轮46与第一同步齿轮42分离,第二同步齿轮46与第三同步齿轮48分离。
44.当第二电机27处于工作状态时,启动气缸45,气缸45通过同步轴43带动第二同步齿轮46移动,使第二同步齿轮46与第一同步齿轮42分离,第二同步齿轮46与第三同步齿轮48分离,以便第二驱动装置能够顺利的驱动水平搅拌组件7转动。
45.当同步带28出现松弛现象,无法带动传动同步带轮30转动时,关闭第二电机27,将同步带28取下,启动气缸45,气缸45驱动同步轴43移动,使第二同步齿轮46与第一同步齿轮42啮合,第二同步齿轮46与第三同步齿轮48啮合,再启动第三电机47,第三电机47带动第三同步齿轮48转动,通过第一同步齿轮42、第二同步齿轮46和第三同步齿轮48的配合,第一同步齿轮42和第二同步齿轮46均发生转动,从而使同步杆39发生转动,同步杆39通过同步分杆41带动水平搅拌叶片26和水平搅拌杆25转动。
46.本技术实施例一种自动补料抹水泥墙面机器人的实施原理为:水泥进入到补料组合1的入口时,先经过搅拌箱6,同时启动第一电机12和第二电机27,双面齿条15带动竖直搅拌杆21和蛇形搅拌叶22上下移动,第二电机27驱动水平搅拌杆25和水平搅拌叶片26转动,蛇形搅拌叶22片和水平搅拌叶片26配合能够对即将进入到补料组合1入口处的水泥从不同方向搅拌,改善了入口处水泥的流动性容易受到影响的问题。
47.当同步带28出现松弛现象时,将第二电机27关闭,将同步带28取下,启动气缸45,使第二同步齿轮46与第一同步齿轮42啮合,第二同步齿轮46与第三同步齿轮48啮合,再启动第三电机47,使同步杆39发生转动,同步杆39通过同步分杆41带动水平搅拌叶片26和水平搅拌杆25转动,避免了水平搅拌组件7的转动受到同步带28松弛带来的影响。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1