一种装配式预制构件安装系统的制作方法
1.本发明涉及建筑装配设备技术领域,具体是指一种装配式预制构件安装系统。
背景技术:
2.装配式建筑是利用预制构件在工地现场进行装配而成的建筑,剪力墙又称抗风墙、抗震墙或结构墙,房屋或构筑物中主要承受风荷载或地震作用引起的水平荷载和竖向荷载的墙体。
3.在装配式建筑施工中,有大量的剪力墙预制构件以及其它预制构件需要进行吊装、对位和安装,在吊装过程中为了使预制构件能够与预留钢筋或预留孔位精确对位,通常在快到达安装位时需要几个工人把扶住剪力墙,需要从多个角度调整悬空状态的剪力墙使其定位准确,然后吊车将剪力墙放置到位,在这个过程中塔吊司机需要与吊装现场的信号员保持实时对讲沟通,再与现场建筑工人配合,需要多人共同完成预制构件的吊装就位。由于把扶的人比较多且用力不协调或者角度不对,会严重影响对位精度,进而影响装配精度,而且对位过程效率比较低,处于吊挂悬空状态的预制构件重量大,对操作人员构成比较大的安全隐患。
4.还需要说明的是,预制构件的结构完整性直接影响到装配式建筑的各项性能,现有的装配式施工过程中,存在着损坏预制构件的情况,尤其是碰撞导致预制构件内部出现裂纹或力学性剪切的情况,从而使得装配式建筑的抗震性能降低。
5.由此可见,亟待一种能够在安装的过程中进行精确定位并且减少对预制构件损伤的安装系统。
技术实现要素:
6.本发明目的在于提供一种装配式预制构件安装系统,用于在安装的过程中进行精确定位并且减少对预制构件损伤。
7.本发明通过下述技术方案实现:一种装配式预制构件安装系统,包括转动座,预制构件,还包括:标定板,放置在地面上,用于参照所述预制构件,移动单元,设置在所述标定板上,用于带动所述转动座移动;移动板,设置在所述移动单元上,用于平衡支撑;支架,设置在所述转动座上,用于支撑固定;横梁,一端铰接设置在所述支架上;液压单元,一端与所述横梁的中部铰接,另一端与所述支架的底部铰接,用于调节所述横梁角度;畸变校正单元,设置在所述横梁中部的下端面,且采集面始终正对所述横梁的另一端;以及夹持安装单元,设置在所述横梁的另一端,用于夹持安装所述预制构件,所述畸变校正单元包括用于校正预制构件位置的校正模块,夹持安装单元内安装有处理器,所述校正模块与所述处理器信号连接,所述处理器用于接收校正模块内产生的校正信号,并根据校正信号产生控制信号调节所述夹持安装单元上预制构件的位置。
8.需要说明的是,在装配式建筑施工中,有大量的剪力墙预制构件以及其它预制构
件需要进行吊装、对位和安装,在吊装过程中为了使预制构件能够与预留钢筋或预留孔位精确对位,通常在快到达安装位时需要几个工人把扶住剪力墙,需要从多个角度调整悬空状态的剪力墙使其定位准确,然后吊车将剪力墙放置到位,在这个过程中塔吊司机需要与吊装现场的信号员保持实时对讲沟通,再与现场建筑工人配合,需要多人共同完成预制构件的吊装就位,不仅费时费力,而且人工安装的预制构件定位不够精确,仍然存在一定的偏差。以现有的机器视觉测量定位技术为例,不仅需要计算大量的相机参数,而且拍摄采集的图像不是透视模型下的理想图像,预制构件在成像介质上的实际成像与理想图像之间存在光学畸变误差,从而直接影响到预制构件的精确定位安装。鉴于这一情况,提出了一种装配式预制构件安装系统,具体通过分步求解相机的内部参数,应用张正友相机标定方法求解标定图像的内部参数,把内部参数应用到畸变校正参数的求解中。根据预制构件的倾斜轴把标定图像划分为投影部分,用分界点的位置坐标求解分界线。根据透视投影原理和对偶投影点校正后的点到主点的距离相等,建立物体倾斜角的参数方程,应用所有对偶投影点的校正点到主点的距离差的绝对值达到最小时的角度就是物体的倾斜角。校正参数求解的时间和空间复杂度非常低,而且提高了畸变图像的校正效果,进而提高视觉测量的精度。
9.进一步地,所述畸变校正单元还包括:图像采集模块,用于采集视野内预制构件在所述标定板上的标定图像;图像筛选模块,与所述图像采集模块信号连接,用于接收所述图像采集模块采集的标定图像,并根据张正友标定算法筛选标定图像,筛选条件为出现角点图,直到出现角点图为止并使出现角点图的标定图像至少为16张;所述校正模块与所述图像筛选模块信号连接,且用于接收所述图像筛选模块筛选后的标定图像,还用于使用张正友开源函数计算所述图像采集模块的内部参数,具体包括:主点坐标、焦距、像素间在标定图像上的实际距离;根据内部参数计算预制构件的倾斜轴以及推演投影点的校正点表达式,在计算预制构件的倾斜角,最终根据倾斜角计算并产生校正信号。
10.需要说明的是,对于畸变校正单元,其工作原理为:通过图像采集模块采集预制构件在标定板上的标定图像,图像筛选模块筛选出满足条件的标定图像后,校正模块根据筛选后的标定图像计算图像采集模块的内部参数,再二值化标定图像,给黑点的像素赋为1或者给其他像素值赋0,用移动窗聚类算法聚类图像中像素值为1的点,点阵标定板有多少个点,就聚成多少类,再用类中各点坐标的算数平均值作为圆形标定点的坐标以确定标定板上的对偶点和其对偶投影点,以及计算对偶投影点到中心点的距离。再以两个分界点的中点为参考点,用最小二乘法拟合样本点得到在坐标平面上物体倾斜轴的斜率以计算远近相机投影点的校正点,根据透视投影原理,把参考点与校正点都校正到成像介质上以计算物体在像素坐标轴上的倾斜角。最后,校正模块在给定迭代次数后,用二分法求解导函数方程得到物体倾斜角,用图像采集模块的内部参数把每个像素点都反向求解校正点,从而得到其校正图像,根据校正图像与标定图像的坐标差异产生校正信号。
11.进一步地,所述横梁上还设置有补光灯,所述补光灯与所述图像筛选模块信号连接,在所述图像筛选模块内设定阈值,当被筛选的标定图像超过阈值时,启动补光灯进行补充图像。需要说明的是,受限于天气或其他原因,图像采集模块所采集到的标定图像可能不满足实用条件,需要针对缺少的标定图像进行补充,以便于提供安装的精确性。
12.进一步地,所述夹持安装单元包括:内部中空的安装盘,用于提供安装主体基座,所述安装盘的上端面开设有圆形滑轨;若干安装件,转动设置在所述安装盘上且呈圆周阵
列分布,用于夹持安装预制构件;卷扬件,设置在所述安装盘的上方;所述安装件包括传动绳,所述传动绳的一端与所述卷扬件连接;以及平衡件,上部与所述横梁的下端面固定,下部与所述卷扬件连接,用于使预制构件平稳安装。需要说明的是,对于夹持安装单元,通过平衡件的稳定性能将使得预制构件始终保持稳定。
13.进一步地,所述安装件还包括:过渡环,通过所述滑轨设置在所述安装盘上;所述安装盘内设置有电机与行星轮组,所述电机的输出端与所述行星轮组连接;传动臂,滑动设置在所述安装盘的内部且呈圆周阵列分布,用于动力传递;安装爪,一端与所述传动臂的活动端铰接,另一端用于夹持安装预制构件;以及传动件,一端与所述传动臂铰接且与所述安装爪相对固定;所述传动绳的另一端活动贯穿所述过渡环后与所述传动件的另一端连接。夹持安装单元的通用性更强,传动臂能够在行星轮组的作用下进行转动,从而根据实际情况进行安装爪的位置调节。
14.进一步地,所述平衡件包括由外至内依次设置的第一圆环、第二圆环以及第三圆环,所述第一圆环与所述第二圆环转动设置,所述第二圆环与所述第三圆环转动设置,所述卷扬件可拆卸连接在所述第三圆环的下部,所述第一圆环与所述横梁的下端面固定连接。基于上述结构,当预制构件在安装过程中即将产生运动趋势时,最直接的表现为卷扬件带来的位移变化,由于卷扬件设置在第三圆环上,第三圆环与第二圆环转动设置,第二圆环与第一圆环转动设置,当预制构件即将发生位移变化时,将瞬时带动第三圆环产生运动趋势,由于第三圆环的连接特性,第三圆环将始终处于平衡状态,即预制构件始终能够保持平稳状态。
15.本发明与现有技术相比,具有如下的优点和有益效果:1、本发明通过对预制构件在安装过程中的标定图像计算推演得出校正图像,再通过校正图像与标定图像的实际差异产生校正信号来对预制构件的安装位置进行精确定位,并且对夹持安装单元而言,还能够对预制构件进行保护,其安装的平稳性也避免了对预制构件造成损伤,从而在安装的过程中进行精确定位并且减少对预制构件损伤;2、本发明校正参数求解的时间和空间复杂度非常低,而且提高了畸变图像的校正效果,进而提高视觉测量的精度;3、本发明安装爪对预制构件的夹持力在平稳状态时约等于预制构件的自重,即并不会因为过大的夹持力对预制构件造成破坏。
附图说明
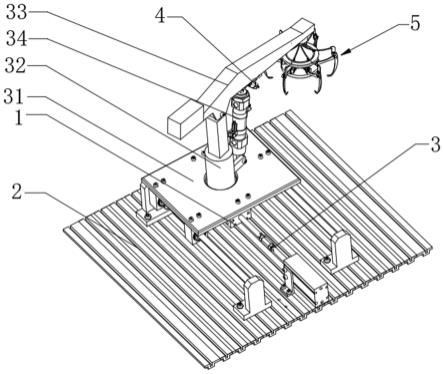
16.此处所说明的附图用来提供对本发明实施例的进一步理解,构成本技术的一部分,并不构成对本发明实施例的限定。在附图中:图1为本发明的结构示意图;图2为夹持安装单元的结构示意图。
17.附图中标记及对应的零部件名称:1-转动座,2-标定板,3-移动单元,31-移动板,32-支架,33-横梁,34-液压单元,4-畸变校正单元,5-夹持安装单元,51-安装盘,52-安装件,521-过渡环,522-传动臂,523-安装爪,524-传动件,53-卷扬件,54-传动绳,55-平衡件,551-第一圆环,552-第二圆环,553-第三圆环。
具体实施方式
18.为使本发明的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本发明作进一步的详细说明,本发明的示意性实施方式及其说明仅用于解释本发明,并不作为对本发明的限定。需要说明的是,本发明已经处于实际研发使用阶段。
19.实施例1:一种装配式预制构件安装系统,包括转动座1,预制构件,还包括:标定板2,放置在地面上,用于参照所述预制构件,标定板2优选为棋盘格标定板2,其大小能够覆盖预制构件的安装范围。
20.移动单元3,设置在所述标定板2上,用于带动所述转动座1移动;移动单元3优选为电动滑轨,且优选的在三维空间的三轴上均能够具有一定位移能力。
21.移动板31,设置在所述移动单元3上,用于平衡支撑;优选为具有承重能力的平板。
22.支架32,设置在所述转动座1上,用于支撑固定;横梁33,一端铰接设置在所述支架32上;液压单元34,一端与所述横梁33的中部铰接,另一端与所述支架32的底部铰接,用于调节所述横梁33角度;液压单元34优选通过依次连通的平衡减压阀、梭动阀、平衡缸、换向阀以及节流阀,以对液压单元34进行动态平衡,从而辅助提高其整体平衡能力。
23.畸变校正单元4,设置在所述横梁33中部的下端面,且采集面始终正对所述横梁33的另一端;以及夹持安装单元5,设置在所述横梁33的另一端,用于夹持安装所述预制构件,所述畸变校正单元4包括用于校正预制构件位置的校正模块,夹持安装单元5内安装有处理器,所述校正模块与所述处理器信号连接,所述处理器用于接收校正模块内产生的校正信号,并根据校正信号产生控制信号调节所述夹持安装单元5上预制构件的位置。
24.需要说明的是,在装配式建筑施工中,有大量的剪力墙预制构件以及其它预制构件需要进行吊装、对位和安装,在吊装过程中为了使预制构件能够与预留钢筋或预留孔位精确对位,通常在快到达安装位时需要几个工人把扶住剪力墙,需要从多个角度调整悬空状态的剪力墙使其定位准确,然后吊车将剪力墙放置到位,在这个过程中塔吊司机需要与吊装现场的信号员保持实时对讲沟通,再与现场建筑工人配合,需要多人共同完成预制构件的吊装就位,不仅费时费力,而且人工安装的预制构件定位不够精确,仍然存在一定的偏差。以现有的机器视觉测量定位技术为例,不仅需要计算大量的相机参数,而且拍摄采集的图像不是透视模型下的理想图像,预制构件在成像介质上的实际成像与理想图像之间存在光学畸变误差,从而直接影响到预制构件的精确定位安装。鉴于这一情况,提出了一种装配式预制构件安装系统,具体通过分步求解相机的内部参数,应用张正友相机标定方法求解标定图像的内部参数,把内部参数应用到畸变校正参数的求解中。根据预制构件的倾斜轴把标定图像划分为投影部分,用分界点的位置坐标求解分界线。根据透视投影原理和对偶投影点校正后的点到主点的距离相等,建立物体倾斜角的参数方程,应用所有对偶投影点的校正点到主点的距离差的绝对值达到最小时的角度就是物体的倾斜角。校正参数求解的时间和空间复杂度非常低,而且提高了畸变图像的校正效果,进而提高视觉测量的精度。
25.还需要说明的是,所述畸变校正单元4还包括:
图像采集模块,用于采集视野内预制构件在所述标定板2上的标定图像;图像筛选模块,与所述图像采集模块信号连接,用于接收所述图像采集模块采集的标定图像,并根据张正友标定算法筛选标定图像,筛选条件为出现角点图,直到出现角点图为止并使出现角点图的标定图像至少为16张;所述校正模块与所述图像筛选模块信号连接,且用于接收所述图像筛选模块筛选后的标定图像,还用于使用张正友开源函数计算所述图像采集模块的内部参数,具体包括:主点坐标、焦距、像素间在标定图像上的实际距离;根据内部参数计算预制构件的倾斜轴以及推演投影点的校正点表达式,在计算预制构件的倾斜角,最终根据倾斜角计算并产生校正信号。
26.对于畸变校正单元4,其工作原理为:通过图像采集模块采集预制构件在标定板2上的标定图像,图像筛选模块筛选出满足条件的标定图像后,校正模块根据筛选后的标定图像计算图像采集模块的内部参数,再二值化标定图像,给黑点的像素赋为1或者给其他像素值赋0,用移动窗聚类算法聚类图像中像素值为1的点,点阵标定板2有多少个点,就聚成多少类,再用类中各点坐标的算数平均值作为圆形标定点的坐标以确定标定板2上的对偶点和其对偶投影点,以及计算对偶投影点到中心点的距离。再以两个分界点的中点为参考点,用最小二乘法拟合样本点得到在坐标平面上物体倾斜轴的斜率以计算远近相机投影点的校正点,根据透视投影原理,把参考点与校正点都校正到成像介质上以计算物体在像素坐标轴上的倾斜角。最后,校正模块在给定迭代次数后,用二分法求解导函数方程得到物体倾斜角,用图像采集模块的内部参数把每个像素点都反向求解校正点,从而得到其校正图像,根据校正图像与标定图像的坐标差异产生校正信号。在进行畸变校正之前,需要通过夹持安装单元5将预制构件粗调至安装位置附近,再通过畸变校正单元4进行精调。
27.本实施例较为优选的是,所述横梁33上还设置有补光灯,所述补光灯与所述图像筛选模块信号连接,在所述图像筛选模块内设定阈值,当被筛选的标定图像超过阈值时,启动补光灯进行补充图像。受限于天气或其他原因,图像采集模块所采集到的标定图像可能不满足实用条件,需要针对缺少的标定图像进行补充,以便于提供安装的精确性。
28.实施例2:本实施例仅记述区别于实施例1的部分,具体为:所述夹持安装单元5包括:内部中空的安装盘51,用于提供安装主体基座,所述安装盘51的上端面开设有圆形滑轨;滑轨横截面为燕尾槽,过渡环521的底部与该燕尾槽匹配。
29.若干安装件52,转动设置在所述安装盘51上且呈圆周阵列分布,用于夹持安装预制构件;安装件52的优选数量为8个。
30.卷扬件53,设置在所述安装盘51的上方;卷扬件53优选为卷扬机。
31.所述安装件52包括传动绳54,所述传动绳54的一端与所述卷扬件53连接;以及平衡件55,上部与所述横梁33的下端面固定,下部与所述卷扬件53连接,用于使预制构件平稳安装。需要说明的是,对于夹持安装单元5,通过平衡件55的稳定性能将使得预制构件始终保持稳定。
32.所述安装件52还包括:过渡环521,通过所述滑轨设置在所述安装盘51上;
所述安装盘51内设置有电机与行星轮组,所述电机的输出端与所述行星轮组连接;传动臂522,滑动设置在所述安装盘51的内部且呈圆周阵列分布,用于动力传递;安装爪523,一端与所述传动臂522的活动端铰接,另一端用于夹持安装预制构件;以及传动件524,一端与所述传动臂522铰接且与所述安装爪523相对固定;需要说明的是,所述传动绳54的另一端活动贯穿所述过渡环521后与所述传动件524的另一端连接。夹持安装单元5的通用性更强,传动臂522能够在行星轮组的作用下进行转动,从而根据实际情况进行安装爪523的位置调节。还需要说明的是,安装爪523对预制构件的夹持力在平稳状态下始终等同于预制构件的自重,从而能够避免夹持力过大。
33.所述平衡件55包括由外至内依次设置的第一圆环551、第二圆环552以及第三圆环553,所述第一圆环551与所述第二圆环552转动设置,所述第二圆环552与所述第三圆环553转动设置,所述卷扬件53可拆卸连接在所述第三圆环553的下部,所述第一圆环551与所述横梁33的下端面固定连接。
34.当预制构件在安装过程中即将产生运动趋势时,最直接的表现为卷扬件53带来的位移变化,由于卷扬件53设置在第三圆环553上,第三圆环553与第二圆环552转动设置,第二圆环552与第一圆环551转动设置,当预制构件即将发生位移变化时,将瞬时带动第三圆环553产生运动趋势,由于第三圆环553的连接特性,第三圆环553将始终处于平衡状态,即预制构件始终能够保持平稳状态。
35.以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1