一种倒车出站式PRT车站及泊位平面设计方法与流程
本发明涉及一种prt车站,特别是一种倒车出站式prt车站及泊位平面设计方法。
背景技术:
1、个人快速运输系统(personal rapid transit,prt)是一种个人快速公共交通系统,使用具有自我导航功能的小型车辆(每辆车大约乘坐1-8人),兼具轿车舒适、便捷和公交车低耗能、运输效率高的特点。每一位乘客都可在特定的乘车点上车,并且去往任一目的地。prt交通系统的概念起源于1900年,但直至1953年人们才开始对现代prt系统进行研究。1964年,fichter等学者发表文章介绍和论述了prt技术的应用前景,对于prt系统的发展有着极大的推进作用。目前,许多国家都对prt系统进行相关研究,也有了突破性的进展。
2、而目前用于prt车辆泊车的车站也进行了一些研究,例如专利公开号为cn112750334a,其公开了一种基于petri网的场馆自动驾驶车辆集中控制方法,其公开的prt车辆泊车的车站就是目前非常常用的prt典型车站,其prt车辆泊位位于主车道的一侧,且prt车辆泊位的两端均与主车道相连通,当prt车辆从prt车辆泊位的一端进入泊位,再从另一端驶出泊位,由于该泊位两端呈喇叭状设置,其单独prt车辆泊位对场地需求比较高,而且prt车辆进入和驶出泊位的过程中容易与其他正在泊位的prt车辆干涉,存在相互碰撞的风险。
技术实现思路
1、本发明的目的在于:针对现有技术存在的prt车辆泊位两端呈喇叭状设置,其单独prt车辆泊位对场地需求比较高,而且prt车辆进入和驶出泊位的过程中容易与其他正在泊位的prt车辆干涉,存在相互碰撞的风险问题,提供一种倒车出站式prt车站及泊位平面设计方法。
2、为了实现上述目的,本发明采用的技术方案为:
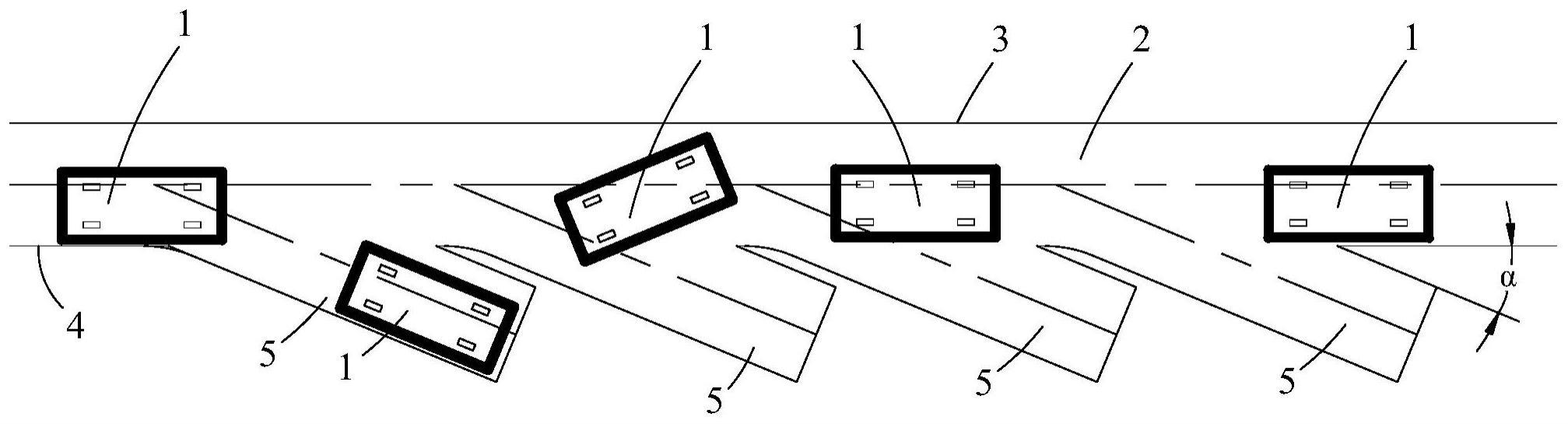
3、一种倒车出站式prt车站,包括主车道,所述主车道的至少一侧连通有至少一个prt车辆泊位,所述prt车辆泊位仅有一端与所述主车道相连通,所述prt车辆泊位与所述主车道之间具有夹角α,0°≤α<90°。
4、本技术所述的一种倒车出站式prt车站,所述prt车辆泊位与所述主车道之间具有夹角α,0°≤α<90°,相比于prt车辆泊位与主车道相垂直设置来说,能够减少rt车辆进出所述prt车辆泊位时所需要的场地宽度,所述prt车辆泊位仅有一端与所述主车道相连通,使得所述prt车辆泊位进入所述prt车辆泊位后,需要驶出所述prt车辆泊位时,后退驶出所述prt车辆泊位,大大减少所述prt车辆泊位内prt车辆转弯所需要的场地空间,从而节约场地,同时避免prt车辆进入和驶出prt车辆泊位的过程中与其他正在泊位的prt车辆干涉的情况的发生。
5、优选地,所述prt车辆泊位与所述主车道之间的夹角α:15°≤α≤45°。
6、优选地,所述主车道的一侧连通有prt车辆泊位。
7、优选地,所述主车道靠近所述prt车辆泊位的一侧边缘为主车道内侧路缘,所述主车道内侧路缘与所述prt车辆泊位边缘之间设置有圆角部。
8、本技术还公开了一种倒车出站式prt车站泊位平面设计方法,基于本技术所述的一种倒车出站式prt车站,该设计方法包含如下步骤:
9、s1.确定prt车辆尺寸参数及prt车辆最小转弯半径参数;
10、s2.基于prt车辆尺寸参数及prt车辆最小转弯半径参数,并根据阿克曼原理计算prt车辆转弯参数;
11、s3.确定prt车辆泊位参数限制条件,并基于prt车辆泊位参数限制条件、prt车辆尺寸参数、prt车辆最小转弯半径参数及prt车辆转弯参数确定prt车辆泊位参数取值范围;
12、s4.确定prt车辆泊位数量为n,prt车辆泊位之间的间距为δt,并基于prt车辆泊位参数取值范围、prt车辆泊位数量为n,prt车辆泊位之间的间距为δt计算prt车辆泊位占地面积参数取值范围和prt车辆通行距离参数取值范围;
13、s6.prt车辆泊位占地面积参数取值范围和prt车辆通行距离参数取值范围确定车站的最优尺寸组合取值。
14、本技术所述的一种倒车出站式prt车站泊位平面设计方法,基于prt车辆尺寸参数及prt车辆最小转弯半径参数,并根据阿克曼原理计算prt车辆转弯参数,基于本技术所述的一种倒车出站式prt车站的结构来确定prt车辆泊位参数限制条件,以得到prt车辆泊位参数取值范围,之后再结合prt车辆泊位数量n,prt车辆泊位之间的间距δt计算prt车辆泊位占地面积参数取值范围和prt车辆通行距离参数取值范围,以此来确定车站的最优尺寸组合取值,从而在保证prt车站泊位的功能的情况下,使得prt车站占地面积更少。
15、优选地,所述prt车辆尺寸参数包括prt车辆尺寸参数和prt车辆最小转弯半径参数。
16、优选地,所述prt车辆转弯参数包括prt车辆环形内半径r、prt车辆环形外半径r、prt车辆运行道路最小内半径r0和prt车辆运行道路最小外半径r0。
17、优选地,prt车辆泊位参数包括prt车辆泊位宽度w2、prt车辆泊位长度l2和prt车辆泊位角度α。
18、优选地,prt车辆泊位参数限制条件包括:
19、a.主车道宽度w1应保证prt车辆转弯进入prt车辆泊位时不与主车道外侧路缘干涉;
20、b.prt车辆泊位长度l2应保证在prt车辆泊位停车的prt车辆不影响主车道上prt车辆通行;
21、c.prt车辆泊位宽度w2应保证prt车辆转弯驶出prt车辆泊位时不与主车道内侧路缘干涉。
22、优选地,车站的最优尺寸组合包括prt车辆泊位角度α、prt车辆泊位长度l2、prt车辆泊位宽度w2、车站长度ls和车站宽度ws。
23、综上所述,由于采用了上述技术方案,本发明的有益效果是:
24、1、本技术所述的一种倒车出站式prt车站,所述prt车辆泊位与所述主车道之间具有夹角α,0°≤α<90°,相比于prt车辆泊位与主车道相垂直设置来说,能够减少rt车辆进出所述prt车辆泊位时所需要的场地宽度,所述prt车辆泊位仅有一端与所述主车道相连通,使得所述prt车辆泊位进入所述prt车辆泊位后,需要驶出所述prt车辆泊位时,后退驶出所述prt车辆泊位,大大减少所述prt车辆泊位内prt车辆转弯所需要的场地空间,从而节约场地,同时避免prt车辆进入和驶出prt车辆泊位的过程中与其他正在泊位的prt车辆干涉的情况的发生。
25、2、本技术所述的一种倒车出站式prt车站泊位平面设计方法,基于prt车辆尺寸参数及prt车辆最小转弯半径参数,并根据阿克曼原理计算prt车辆转弯参数,基于本技术所述的一种倒车出站式prt车站的结构来确定prt车辆泊位参数限制条件,以得到prt车辆泊位参数取值范围,之后再结合prt车辆泊位数量n,prt车辆泊位之间的间距δt计算prt车辆泊位占地面积参数取值范围和prt车辆通行距离参数取值范围,以此来确定车站的最优尺寸组合取值,从而在保证prt车站泊位的功能的情况下,使得prt车站占地面积更少。
- 还没有人留言评论。精彩留言会获得点赞!