钢筋网片流转线的制作方法
1.本实用新型属于混凝土预制构件生产设备领域,主要是涉及能及时准确的将钢筋网片从生产工位转移到混凝土预制构件生产线上的钢筋网片流转线。
背景技术:
2.钢筋网片是混凝土预制构件生产中必不可少的预埋件,主要是防止混凝土预制构件开裂,同时预制构件在安装时,钢筋网片超出预制构件的伸出筋,还可以起到构件之间的连接作用。所以在混凝土预制构件生产中,预埋钢筋网片的生产和转运都是重要的环节。钢筋网片的生产与流转使用,通常分别布置在相邻但不同跨厂房内。两跨厂房分别为钢筋网片生产线和预制构件生产线;目前,钢筋网片主要是在辊道上单张流转;或者是堆放储存在托盘上,随托盘一起用叉车或吊装转运。由于网片的生产设备与预制构件模台之间有一定的距离,网片在辊道上单张流转存在效率低的问题,如果传输的通道处有障碍物或布置有其它设备,给辊道的设置也带来困难。网片堆放在托盘上用叉车运输,存在运输通道拥堵和往返效率低的问题。不但占用了生产场地的通道,也存在不安全的因素。
技术实现要素:
3.本实用新型的目的是提供一种钢筋网片流转线,该流转线能方便快捷的进行钢筋网片的流转,并减少了占用生产作业场地的问题。
4.本实用新型是通过以下技术方案实现的,包括托盘、托盘输送线、托盘升降机、网片机械手和垫木机械手,其特征是:所述的托盘输送线是环形输送线,输送线上依次设置有托盘装网片工位、托盘升降机、托盘卸网片工位和空托盘升降机,各工位或设备之间通过输送辊道衔接;托盘装网片工位位于流转线的一层,托盘卸网片工位位于流转线的二层;托盘设置在输送辊道的上面,托盘在环形输送线的输送辊道上运行时,其底盘依次与各辊道的辊轮接触。
5.在一层的托盘装网片工位处,设置有将钢筋网片吊到托盘上面的网片机械手ⅰ和将垫木从垫木存储架吊到垫木隔离架并落在钢筋网片上面的垫木机械手ⅰ。
6.在二层的托盘卸网片工位处,设置有将钢筋网片从托盘上吊到网片升降辊道上的网片机械手ⅱ和将垫木从垫木隔离架吊到垫木存储架的垫木机械手ⅱ。
7.所述的托盘包括底盘、垫木存储架和垫木隔离架;垫木存储架和垫木隔离架垂直安装在底盘的相对的两个侧边上;垫木存储架位于侧边的两端,垫木隔离架位于侧边上两个垫木存储架之间。
8.托盘升降机和空托盘升降机位于一层与二层之间的托盘升降开口处,降下时升降机上的辊道与一层的托盘装网片工位的辊道相连通,升起时与二层的托盘卸网片工位的辊道相连通;网片升降辊道位于一层与二层之间的升降辊道开口处,升起时位于二层的网片机械手ⅱ附近,落下时与一层通往模台的辊道相连通;网片机械手ⅲ位于通往模台的辊道附近。
9.所述的托盘升降机与空托盘升降机的结构相同,包括升降机底座、升降机剪刀梁和升降机辊道,升降机辊道通过升降机剪刀梁与升降机底座连接;升降机剪刀梁的四个端部通过铰链与升降机辊道或升降机底座连接,另四个端部通过升降机导轨导轮与升降机辊道或升降机底座连接;在升降机剪刀梁上,通过升降机连接梁装有控制升降机辊道升降的托盘升降油缸;升降机辊道电机安装在升降机辊道的端部。
10.所述的网片升降辊道包括底座、剪刀梁和辊道框架,辊道框架通过剪刀梁与底座连接;剪刀梁的四个端部通过铰链与辊道框架或底座连接,另四个端部通过导轨导轮与辊道框架或底座连接;在剪刀梁上,通过连接梁装有控制辊道框架升降的升降油缸;圆柱辊安装在辊道框架上,辊道电机安装在辊道框架的端部。
11.所述的垫木机械手ⅰ与垫木机械手ⅱ的结构相同,包括横向行走梁、纵向行走梁、升降梁和旋转框架;旋转框架安装在升降梁的下面,由旋转电机驱动;升降梁通过滑轨座与纵向行走梁连接,纵向行走梁与横向行走梁连接,横向行走梁通过行走轮与机架上的轨道接触,并分别与升降电机、纵向电机和横向电机连接;旋转框架下面装有可抓取垫木的气动开口夹。
12.所述的网片机械手ⅰ、ⅱ和ⅲ的结构相同,均是三维运动的电磁吸盘机械手。
13.网片机械手ⅰ和垫木机械手ⅰ位于装网片机架的轨道上,交替轮流进行吊装钢筋网片或垫木的往复运动;网片机械手ⅱ和垫木机械手ⅱ位于卸网片机架的轨道上,交替轮流进行吊装钢筋网片或垫木的往复运动。
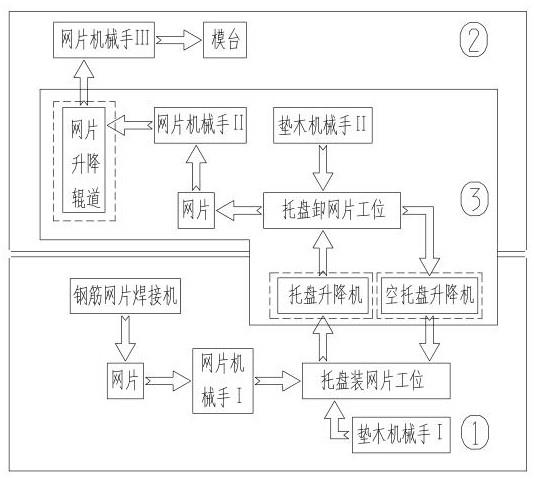
14.钢筋网片流转线作业时,首先由网片机械手ⅰ把钢筋网片焊接机制作的钢筋网片,抓放到托盘装网片工位处的托盘上,再由垫木机械手ⅰ把托盘两侧的垫木存储架上的垫木抓取摆放到垫木隔离架内钢筋网片的上方,对后摆放的钢筋网片起到隔离的作用。依次再摆放钢筋网片和垫木,托盘内的钢筋网片摆放结束后,启动输送辊道。托盘经输送辊道运行到托盘升降机辊道上,托盘升降机升起到二层,升降机上的辊道与托盘卸网片工位的输送辊道相连通,托盘运行到托盘卸网片工位处。此时,网片机械手ⅱ将托盘上的网片吊到网片升降辊道上,垫木机械手ⅱ将网片上面的隔离垫木吊到垫木存储架上存放,依次吊完托盘上的网片与垫木。卸完网片的空托盘经空托盘升降机返回到托盘装网片工位处待用。装有网片的网片升降辊道下落到一层,通过输送辊道和网片机械手ⅲ转运到预制构件的模台上。
15.本实用新型的有益效果是,钢筋网片通过托盘进行流转可以多片同时远距离输送,流转效率高。托盘上的钢筋网片通过垫木进行隔离,可以堆放多层而不能产生勾连的现象。钢筋网片采用二层平台流转,空间利用更合理,实现钢筋网片的有序流转。具有工艺合理、结构紧凑、流转效率高和自动化程度高的特点。可广泛应用于各种混凝土预制构件生产线所用钢筋网片的自动化快速流转。
附图说明
16.图1是本实用新型的整体结构示意框图;
17.图2是一层托盘装网片工位设备布置图;
18.图3是二层平台托盘卸网片工位设备布置图,包括托盘升降机,空托盘升降机省略未画出;
7;升降机辊道电机13-4安装在升降机辊道13-3的端部。
32.所述的网片升降辊道8包括底座8-1、剪刀梁8-2和辊道框架8-3,辊道框架8-3通过剪刀梁8-2与底座8-1连接;剪刀梁8-2的四个端部通过铰链与辊道框架8-3或底座8-1连接,另四个端部通过导轨导轮8-6与辊道框架8-3或底座8-1连接;在剪刀梁8-2上,通过连接梁8-7装有控制辊道框架8-3升降的升降油缸8-8;圆柱辊8-4安装在辊道框架8-3上,辊道电机8-5安装在辊道框架8-3的端部。
33.所述的垫木机械手ⅰ5与垫木机械手ⅱ10的结构相同,包括横向行走梁5-1、纵向行走梁5-3、升降梁5-5和旋转框架5-7;旋转框架5-7安装在升降梁5-5的下面,由旋转电机5-8驱动;升降梁5-5通过滑轨座与纵向行走梁5-3连接,纵向行走梁5-3与横向行走梁5-1连接,横向行走梁5-1通过行走轮与机架上的轨道接触,并分别与升降电机5-6、纵向电机5-4和横向电机5-2连接;旋转框架5-7下面装有可抓取垫木的气动开口夹5-9。
34.所述的网片机械手ⅰ、ⅱ和ⅲ的结构相同,均是三维运动的电磁吸盘机械手。
35.网片机械手ⅰ4和垫木机械手ⅰ5位于装网片机架6的轨道上,交替轮流进行吊装钢筋网片7或垫木的往复运动;网片机械手ⅱ9和垫木机械手ⅱ10位于卸网片机架11的轨道上,交替轮流进行吊装钢筋网片7或垫木的往复运动。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1