一种预制墙模具的整平装置的制作方法
1.本技术涉及预制墙模具技术领域,尤其是涉及一种预制墙模具的整平装置。
背景技术:
2.预制墙是由水泥板拼接而成的一种临时工程围墙。不仅造型美观、绿色环保,而且施工便捷、成本低廉,已成为粘土墙和混凝土墙的最理想的代替品,可广泛应用于建筑工地、城市建设、环境美化、工业技术改造等各类施工工程领域。
3.制造预制墙时,需要用到预制墙模具,水泥灌注满模具后,需要将其表面整平,从而得到比较完美的预制墙。现有技术中,通常是人工用刮板手动整平。
4.针对上述中的相关技术,人工用刮板手动整平费时费力,导致预制墙的制作效率低下。
技术实现要素:
5.为了提高预制墙的制作的效率,本技术提供一种预制墙模具的整平装置。
6.本技术提供的一种预制墙模具的整平装置采用如下的技术方案:
7.一种预制墙模具的整平装置,其特征在于,包括整平块、横向导轨、纵向支架,所述整平块下方设置有用于制作预制墙的模具,所述横向导轨沿模具长度方向设置,所述纵向支架沿模具宽度方向设置,还包括横向移动组件和纵向移动组件,所述横向移动组件用于驱动整平块沿横向导轨长度方向往复滑移,所述纵向移动组件用于驱动横向导轨沿纵向支架长度方向移动。
8.通过采用上述技术方案,整平块和横向移动组件相配合,整平块可以沿横向导轨长度方向往复滑移,整平块在滑移过程中刮蹭模具上表面,从而将模具内超出模具上表面的水泥部分刮离模具,从而可以实现对模具长度方向进行整平;横向导轨和纵向移动组件相配合,纵向移动组件可以带动横向导轨沿模具宽度方向滑移,从而可以实现整平块对整个模具进行整平。因此可以提高预制墙的制作效率。
9.优选的,所述横向移动组件包括第一丝杆、第一电机,所述第一丝杆转动连接于横向导轨上,且所述整平块螺纹套接于第一丝杆上,所述第一电机驱动轴设置于第一丝杆端部,以用于驱动第一丝杆转动;所述纵向移动组件包括第二丝杆、第二电机;所述第二丝杆转动连接于纵向支架上,所述横向导轨螺纹套接于第二丝杆上,所述第二电机驱动轴设置于第二丝杆端部,以用于驱动第二丝杆转动。
10.通过采用上述技术方案,整平块螺纹套接于第一丝杆上,第一电机驱动第一丝杆转动,从而可以实现整平块沿模具长度方向的横向滑移;横向导轨螺纹套接于第二丝杆上,第二电机驱动第二丝杆转动,从而可以实现横向导轨沿模具宽度方向的纵向滑移。因此可以实现整平块自动对整个模具的整平。
11.优选的,还包括余料收集组件,所述余料收集组件用于收集所述模具内被整平块刮出的多余水泥以及整平块表面残留的多余水泥。
12.通过采用上述技术方案,整平块整平模具内的水泥之后,多余的水泥以及整平块上残留的水泥可以被余料收集组件收集,实现清洁环保生产的同时,提高对多余水泥的回收效率。
13.优选的,所述余料收集组件包括两个收集箱和设置于每一收集箱内的刮板,其中一个所述收集箱连接在横向导轨长度方向的其中一端,另一个所述收集箱连接在横向导轨长度方向的另一端;所述刮板连接在对应收集箱的内部中间位置,所述刮板长度平行于收集箱宽度方向,所述刮板用于在整平块移动至刮板上方时,刮蹭整平块底壁。
14.通过采用上述技术方案,收集箱、刮板相配合,在整平块滑移到收集箱上方时,整平块将多余的水泥推进收集箱内;刮板与整平块接触,将整平块上多余的水泥刮进收集箱内。实现了对多余水泥的收集以及对整平块表面的清理,保证整平块后续对模具内水泥的整平效果。
15.优选的,所述余料收集组件还包括进给螺栓,所述进给螺栓与收集箱一一对应设置,且所述进给螺栓螺纹连接于对应收集箱底壁;每一所述刮板远离收集箱敞口处一端开设有供进给螺栓插设的对接孔,所述进给螺栓螺纹贯穿对应的收集箱底壁并插设于对接孔内。
16.通过采用上述技术方案,刮板长时间刮蹭整平块表面之后,刮板表面会出现磨损的情况,通过设置进给螺栓,从而可以实现刮板磨损缩短之后,通过拧进给螺栓,刮板向上位移,保证刮板与整平块相接触,延长刮板的使用寿命,降低刮板的更换频率。
17.优选的,所述刮板侧壁设置有导向面,所述导向面用于便于刮板上的水泥加速下滑至收集箱内。
18.通过采用上述技术方案,通过设置导向面,从而能使水泥加速下滑至收集箱内。
19.优选的,每一所述收集箱内还设置有搅拌组件,所述搅拌组件包括两个搅拌辊、设置于每一所述搅拌辊周壁上的搅拌叶片和与所述搅拌辊一一对应设置的搅拌马达;所述搅拌辊其中一端与搅拌马达驱动轴连接,所述搅拌辊另一端转动连接在对应的收集箱内壁,所述刮板位于两个搅拌辊中间。
20.通过采用上述技术方案,搅拌辊、搅拌叶片和搅拌马达相配合,在水泥下滑至收集箱内之后,对水泥进行搅拌,从而可以延缓水泥凝固的时间,保证水泥的活性,提高对回收的水泥的利用率。
21.优选的,所述搅拌叶片远离对应搅拌辊处的一端端壁设置有毛刷,所述毛刷用于在随搅拌辊转动至靠近刮板时,刮蹭刮板上的导向面。
22.通过采用上述技术方案,搅拌辊转动的时候,毛刷与导向面相接触,从而便于清理导向面残留的水泥,减少导向面上滞留的水泥量。
23.综上所述,本技术包括以下至少一种有益效果:
24.1、通过整平块、横向导轨、第一纵向导轨、第二纵向导轨、丝杆、电机相配合的技术,使得整平块横向纵向可以往复滑移,从而能实现整平块对整个模具自动进行整平的效果。
25.2、通过设置收集箱和刮板,可以使整平后多余的水泥被收集至收集箱内,刮板刮蹭整平板上残留的水泥至收集箱内,从而实现了对多余水泥的收集以及对整平块表面的清理,保证整平块后续对模具内水泥的整平效果。
26.3、通过搅拌辊、搅拌叶片和搅拌马达的设置,可以搅拌收集箱内的水泥,从而能延缓收集箱内水泥的凝固时间。
附图说明
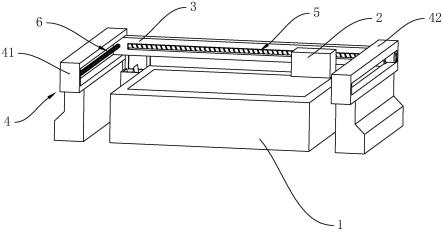
27.图1是本技术实施例中一种预制墙模具的整平装置的整体结构图。
28.图2是本技术实施例中用于体现横向移动组件和纵向移动组件的结构的剖视图。
29.图3是本技术实施例中余料收集组件、余料收集组件和横向导轨位置关系的结构示意图。
30.图4是图5中a的放大示意图。
31.图5是本技术实施例中搅拌辊、搅拌马达和导向面的结构示意图。
32.附图标记说明:1、模具;2、整平块;3、横向导轨;4、纵向支架;41、第一纵向导轨;42、第二纵向导轨;5、横向移动组件;51、第一丝杆;52、第一电机;6、纵向移动组件;61、第二丝杆;62、第二电机;7、第一通槽;8、第二通槽;9、余料收集组件;91、收集箱;92、刮板;93、进给螺栓;94、对接孔;10、搅拌组件;101、搅拌辊;1011、搅拌叶片;1012、毛刷;102、搅拌马达;11、导向面。
具体实施方式
33.以下结合附图1-5对本技术作进一步详细说明
34.本技术实施例公开一种预制墙模具的整平装置。参照图1,预制墙的整平装置包括模具1、整平块2、横向导轨3、纵向支架4、横向移动组件5、纵向移动组件6;整平块2设置在模具1上方,且整平块2下表面可以与模具1上表面相贴合;横向导轨3沿模具1长度方向设置,纵向支架4沿模具1宽度方向设置,横向移动组件5用于驱动整平块2沿横向导轨3长度方向往复滑移,纵向移动组件6用于驱动横向导轨3沿纵向支架4长度方向往复滑移,以使得整平块2在移动的过程中对整个模具1内的水泥进行整平。
35.参照图1和图2,横向导轨3朝向整平块2一侧开设有第一通槽7,第一通槽7的长度平行于横向导轨3长度方向;纵向支架4包括第一纵向导轨41和第二纵向导轨42,第一纵向导轨41和第二纵向导轨42相互朝向的侧壁均开设有第二通槽8,横向导轨3位于第一纵向导轨41和第二纵向导轨42之间;
36.参照图2,横向移动组件5包括第一丝杆51和第一电机52,第一丝杆51转动连接于第一通槽7内,整平块2其中一侧插设于第一通槽7内,且螺纹套接于第一丝杆51上,第一电机52的壳体通过螺栓安装于横向导轨3端部,且第一电机52的驱动轴焊接在第一丝杆51端部;纵向移动组件6包括第二丝杆61和第二电机62;第二丝杆61转动连接于第二通槽8内,横向导轨3靠近第一纵向导轨41的一端螺纹套接于第二丝杆61上,第二电机62的壳体通过螺栓安装于第一纵向导轨41端部,第二电机62的驱动端焊接在第二丝杆61端部。第一电机52驱动第一丝杆51转动,使得整平块2可以沿模具1长度方向往复滑移,第二电机62驱动第二丝杆61转动,使得横向导轨3可以沿模具1宽度方向往复滑移,在横向导轨3移动过程中,第一电机52沿第二通槽8长度方向滑移。
37.参照图3、图4和图5,横向导轨3上设置有余料收集组件9,余料收集组件9包括两个收集箱91、设置于每一收集箱91内的刮板92,以及设置于每一刮板92上的进给螺栓93;收集
箱91与横向导轨3的端部用连接杆连接,刮板92连接在对应收集箱91的内部中间位置,刮板92长度平行于收集箱91宽度方向;刮板92远离收集箱91敞口处的一端开设有对接孔94,进给螺栓93螺纹贯穿对应的收集箱91底壁并插设在对接孔94内。刮板92远离刮板92与收集箱91连接的一侧可以与整平块2底面相接触,刮板92侧壁设置有导向面11。当整平块2滑移到收集箱91上方时,整平后多余的水泥通过整平块2推进收集箱91内;刮板92将整平块2底面残留的水泥刮离至收集箱91内;水泥可以通过导向面11加速滑至收集箱91内。
38.参照图5,每一收集箱91内还设置有搅拌组件10,搅拌组件10包括两个搅拌辊101、设置于每一搅拌辊101上的搅拌叶片1011,以及与搅拌辊101一一对应设置的搅拌马达102,搅拌马达102壳体通过螺栓安装于收集箱91外侧壁,搅拌辊101其中一端与收集箱91内壁转动连接,另一端与搅拌马达102驱动轴连接,搅拌辊101长度平行于收集箱91长度方向,搅拌叶片1011固定焊接于对应的搅拌辊101周壁,搅拌叶片1011远离对应搅拌辊101处的一端端壁连接有毛刷1012。启动搅拌马达102,使得搅拌辊101转动,搅拌叶片1011上的毛刷1012在随搅拌辊101转动至靠近刮板92时,对导向面11上残留的水泥进行清扫。
39.本技术实施例中一种预制墙模具的整平装置的实施原理为:
40.模具1填充满水泥后,在对其进行整平时,启动第一电机52,第一电机52带动第一丝杆51转动,使得整平块2可以沿着横向导轨3长度方向往复滑移,在整平块2滑移到横向导轨3另一端后,将整平后多余的水泥通过整平块2推到收集箱91内,刮板92与整平块2底面相接触,将整平块2底面残留的水泥刮至收集箱91内;接着启动第二电机62,第二电机62带动第二丝杆61转动,使得横向导轨3可以沿着第一纵向导轨41和第二纵向导轨42长度方向滑移,滑移一个整平块2宽度距离后停止滑移,整平块2从刚整平结束的位置再次沿横向导轨3长度方向滑移,整平块2滑移到横向导轨3另一端后,整平后多余的水泥通过整平块2推到收集箱91内,刮板92与整平块2底面相接触,将整平块2底面残留的水泥刮至收集箱91内;启动搅拌马达102,使得搅拌辊101转动,水泥因此被搅动。从而提高了预制墙的制作效率。
41.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1