一种整体举升式停车机器人的制作方法
1.本实用新型涉及辅助停车技术领域,具体来说,涉及一种整体举升式停车机器人。
背景技术:
2.随着国民经济的快速发展,国内外汽车的保有量迅速增加,停车难的问题日益明显,城市区域停车压力增加,乱停车、不好停车的现象越来越多,就需要一款简单操作,使用方便的停车设备。
3.在停车场配置停车机器人是缓解城市停车难问题的一个有效办法,常见的停车机器人有夹持式停车机器人、载车板停车机器人、梳齿式停车机器人等,目前在使用运行中各有优缺点,这几类形式搬运机器人平台结构复杂,所以停车机器人的尺寸很大,使得停车场的运营和建设成本较高。
4.针对相关技术中的问题,目前尚未提出有效的解决方案。
技术实现要素:
5.本实用新型的目的在于提供一种整体举升式停车机器人,以解决上述背景技术中提出的问题。
6.为实现上述目的,本实用新型提供如下技术方案:一种整体举升式停车机器人包括车体,所述车体两侧设有行走机构,所述车体上方通过两组举升机构连接有托盘,所述托盘两端均设有辅助支撑机构;
7.行走机构,所述行走机构包括行走组件,车体两侧的两端均安装有可转动的行走组件,车体两侧的中部均固定有第一减速电机,第一减速电机的输出轴均固定套设有双排链轮,且行走组件均通过链条与对应的双排链轮进行传动;
8.举升机构,所述举升机构包括丝杆,丝杆两端均安装有固定座,固定座均固定在车体上,丝杆外壁螺纹传动连接有滑块支座,滑块支座两端均滑动连接有滑轨,且滑轨均固定在车体上,丝杆一端连接有第二减速电机,滑块支座两端均铰接有第一连杆,第一连杆上端均通过支座一与托盘铰接,第一连杆中部均铰接有第二连杆,第二连杆远离第一连杆的一端均通过支座二与车体铰接。
9.进一步的,所述第一减速电机包括第一伺服电机和减速机,第一伺服电机的输出端安装有减速机,第一伺服电机和减速机均固定在车体上,双排链轮固定套设在减速机的输出轴外壁。
10.进一步的,所述行走组件包括行走轴,行走轴外壁固定有行走轮和从动链轮,行走轴两端外壁均固定套设有轴承,轴承的外圈均固定套设有盖板,且盖板均与车体固定连接,从动链轮均通过链条与对应的双排链轮进行传动。
11.进一步的,所述第二减速电机包括第二伺服电机和直角减速机,第二伺服电机的输出端安装有直角减速机,第二伺服电机和直角减速机均固定在车体上,直角减速机的输出轴通过联轴器与丝杆一端固定连接。
12.进一步的,所述滑块支座的两端均固定有滑块,滑块均与对应的滑轨滑动连接,且滑块支座中部固定嵌设有螺母,螺母螺纹连接在对应的丝杆外壁。
13.进一步的,所述辅助支撑机构包括直线驱动机构,托盘的两端均固定有直线驱动机构,直线驱动机构的两端均连接有滑杆,滑杆外壁均滑动套设有滑杆座,滑杆座与托盘固定连接,滑杆远离直线驱动机构的一端均固定有支撑座。
14.与现有技术相比,本实用新型具有以下有益效果:解决了行走机构、举升机构的结构复杂的问题,减小了停车机器人的尺寸和厚度,增大了升降过程中的稳定定性,存储效率大大提高,整体的重量更轻,结构更稳定,从而降低停车场的运营与建设成本。
附图说明
15.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
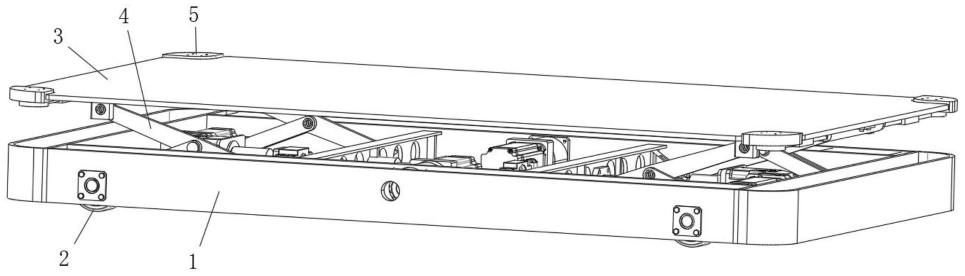
16.图1是根据本实用新型实施例的一种整体举升式停车机器人的结构示意图;
17.图2是根据本实用新型实施例的一种整体举升式停车机器人中车体的结构示意图;
18.图3是根据本实用新型实施例的一种整体举升式停车机器人中车体的俯视图;
19.图4是根据本实用新型实施例的一种整体举升式停车机器人中行走组件的结构示意图;
20.图5是根据本实用新型实施例的一种整体举升式停车机器人中举升机构的结构示意图;
21.图6是根据本实用新型实施例的一种整体举升式停车机器人中托盘和辅助支撑机构的结构示意图。
22.附图标记:
23.1、车体;2、行走机构;21、行走组件;211、行走轴;212、从动链轮;213、轴承;214、盖板;215、行走轮;22、第一减速电机;221、第一伺服电机;222、减速机;23、双排链轮;24、链条;3、托盘;4、举升机构;41、丝杆;42、固定座;43、滑块支座;431、滑块;432、螺母;44、滑轨;45、第二减速电机;451、第二伺服电机;452、直角减速机;453、联轴器;46、第一连杆;47、支座一;48、第二连杆;49、支座二;5、辅助支撑机构;51、直线驱动机构;52、滑杆;53、滑杆座;54、支撑座。
具体实施方式
24.下面,结合附图以及具体实施方式,对实用新型做出进一步的描述:
25.实施例:
26.请参阅图1-2,根据本实用新型实施例的一种整体举升式停车机器人,包括车体1,所述车体1两侧设有行走机构2,所述车体1上方通过两组举升机构4连接有托盘3,所述托盘3两端均设有辅助支撑机构5,其中,行走机构2能够驱动车体1进行移动,举升机构4能够调节托盘3的高度,辅助支撑机构5能够辅助托盘3对汽车进行托举;
27.请参阅图3,行走机构2,所述行走机构2包括行走组件21,车体1两侧的两端均安装有可转动的行走组件21,车体1两侧的中部均固定有第一减速电机22,第一减速电机22的输出轴均固定套设有双排链轮23,且行走组件21均通过链条24与对应的双排链轮23进行传动,通过第一减速电机22能够驱动行走组件21转动,从而能够驱动车体1进行移动;
28.请参阅图4,所述行走组件21包括行走轴211,行走轴211外壁固定有行走轮215和从动链轮212,行走轴211两端外壁均固定套设有轴承213,轴承213的外圈均固定套设有盖板214,且盖板214均与车体1固定连接,从动链轮212均通过链条24与对应的双排链轮23进行传动,通过第一减速电机22能够驱动从动链轮212、行走轴211和行走轮215转动,从而驱动车体1进行移动;
29.请参阅图2和5,举升机构4,所述举升机构4包括丝杆41,丝杆41两端均安装有固定座42,固定座42均固定在车体1上,丝杆41外壁螺纹传动连接有滑块支座43,其中,所述滑块支座43的两端均固定有滑块431,滑块431均与对应的滑轨44滑动连接,且滑块支座43中部固定嵌设有螺母432,螺母432螺纹连接在对应的丝杆41外壁,滑块支座43两端均滑动连接有滑轨44,且滑轨44均固定在车体1上,丝杆41一端连接有第二减速电机45,滑块支座43两端均铰接有第一连杆46,第一连杆46上端均通过支座一47与托盘3铰接,第一连杆46中部均铰接有第二连杆48,第二连杆48远离第一连杆46的一端均通过支座二49与车体1铰接,第二减速电机45能够驱动丝杆41转动,从而能够驱动滑块支座43沿着滑轨44进行平移,从而能够调节第一连杆46的倾斜角度,进而能够对托盘3的高度进行调节;
30.请参阅图6,所述辅助支撑机构5包括直线驱动机构51,托盘3的两端均固定有直线驱动机构51,直线驱动机构51的两端均连接有滑杆52,滑杆52外壁均滑动套设有滑杆座53,滑杆座53与托盘3固定连接,滑杆52远离直线驱动机构51的一端均固定有支撑座54,其中,直线驱动机构51能够将两端的滑杆52同步向外推,也能够将两端的滑杆52同步向内拉,从而能够对支撑座54的位置进行调节,直线驱动机构51为两端均设置有推杆的直线往复运动的电动推杆形式,还可以选择为丝杆41螺母432的传动方式、齿轮齿条的传动方式等。
31.在进一步的实施例中,所述第一减速电机22包括第一伺服电机221和减速机222,第一伺服电机221的输出端安装有减速机222,第一伺服电机221和减速机222均固定在车体1上,双排链轮23固定套设在减速机222的输出轴外壁,第一伺服电机221工作时经过减速机222的减速传动后能够驱动双排链轮23转动。
32.在进一步的实施例中,所述第二减速电机45包括第二伺服电机451和直角减速机452,第二伺服电机451的输出端安装有直角减速机452,第二伺服电机451和直角减速机452均固定在车体1上,直角减速机452的输出轴通过联轴器453与丝杆41一端固定连接,第二伺服电机451工作时经过直角减速机452的减速传动后能够驱动丝杆41转动。
33.为了方便理解本实用新型的上述技术方案,以下就本实用新型在实际过程中的工作原理或者操作方式进行详细说明。
34.在实际应用时,将汽车行驶到与车位平行的位置,通过控制第一伺服电机221能够驱动行走轮215转动,从而能够驱动该机器人在地面上进行移动,将该机器人移动汽车的底盘正下方,并且行走轮215的移动方向与汽车车身垂直,然后控制直线驱动机构51进行伸缩将支撑座54调节到合适的位置,使得支撑座54能够对汽车的底盘进行有效的支撑即可,然后控制第二伺服电机451工作,第二伺服电机451能够带动丝杆41转动,丝杆41转动能够通
过螺母432驱动滑块支座43沿着滑杆52进行平移,使得第一连杆46下半部分与第二连杆48之间的夹角变小,从而能够通过支座一47将托盘3向上举,直至托盘3将汽车托举离开地面即可,然后通过控制控制第一伺服电机221工作,即可通过机器人将汽车横向移动到车位内,从而能够缩短侧方位停车之间的间距,提高停车场的空间利用率,与现有技术相比本专利主要解决了行走机构2、举升机构4的结构复杂的问题,减小了停车机器人的尺寸和厚度,增大了升降过程的稳定定性,存储效率大大提高,该机器人的重量更轻,结构更稳定,从而降低了停车场的运营与建设成本。
35.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1