一种全自动混凝土搅拌机动作指令装置的制作方法
本技术涉及一种装置,尤其是一种全自动混凝土搅拌机动作指令装置。
背景技术:
1、混凝土是当今时代最大宗的人造材料,也是最主要的建筑材料之一,广泛应用于工业、农业、交通、国防、水利、市政和民用基础设施建设中,在国民经济中占有重要地位,在普通混凝土中,砂、石起骨架作用,他们在混凝土中起填充和抵抗混凝土在凝结硬化过程中的收缩作用,水泥与水形成的水泥浆包裹在骨料表面并填充骨料间的空隙,在花、硬化前,水泥浆起润滑作用,赋予混合物一定的和易性,便于施工 ;硬化后,水泥浆则将骨料胶结成一个坚实的整体,并具有一定的强度,混凝土作为主要建筑材料被广泛应用,是因为它具有很多其他材料不具备的特点,所以混凝土搅拌机是应用广泛的工程机械。
2、传统的混凝土搅拌机由于上料斗的下降距离是通过电机的转数来控制的,所以会造成在有坡度或者有阻挡物的工况路面时、上料都其实已经在最底端的路面了,而电机的转数圈数还没达设定好的转数到而继续旋转,从而会造成带动上料斗翻转的钢丝拉绳缠绕起来,从而造成混凝土搅拌机发生故障,从而需要维修及增加生产成本。
3、中国实用新型专利cn 213704017 u公开了一种防溢型混凝土搅拌机进料斗及混凝土搅拌机,该种搅拌机:包括斗体,斗体前端出料口位于搅拌筒入料口内,位于搅拌筒入料口内的斗体前端出料口下部外侧设置有防溢挡板;防溢挡板与斗体前端出料口下部采用固定连接或可拆卸连接,该种混凝土搅拌机不适合任意工况环境下的下料斗下翻到地面,会经常造成带动下料斗的钢丝拉绳缠绕一起而无法工作,需要停机维修,增加生产成本。
技术实现思路
1、本实用新型要解决上述现有技术的缺点,提供一种全自动混凝土搅拌机动作指令装置。
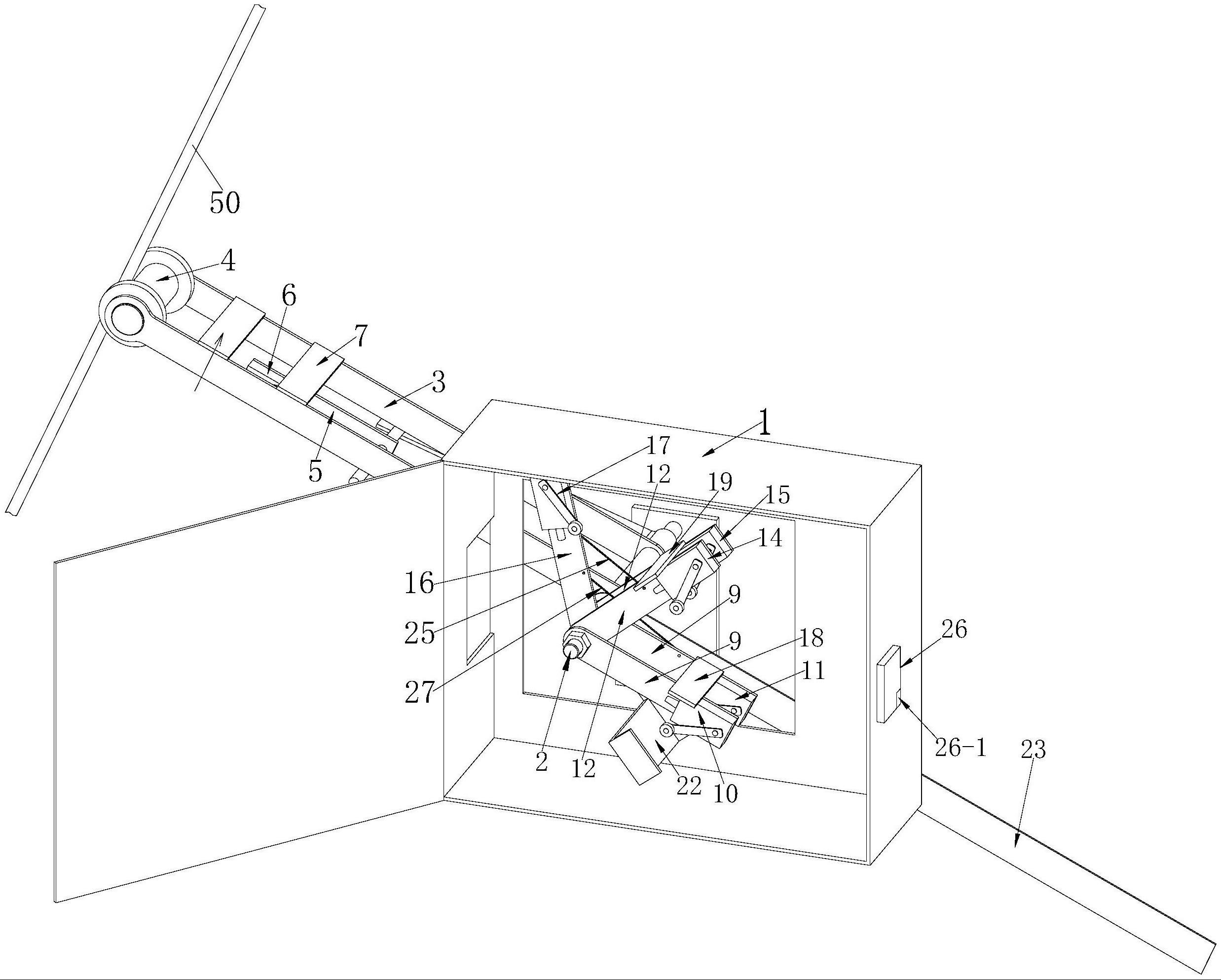
2、本实用新型解决其技术问题采用的技术方案:这种全自动混凝土搅拌机动作指令装置,包括固定在搅拌机基座上的机壳,机壳上设有横向圆杆,横向圆杆上铰接有悬架,悬架的外端转动连接有与搅拌机钢丝拉绳配合的靠轮,悬架的下方设有固定在横向圆杆上的支撑托架,支撑托架上固定有第一触碰信号开关sq1,悬架上固定有用于触碰第一触碰信号开关sq1的第一抵板。这里机壳、横向圆杆、悬架、靠轮、支撑托架、第一触碰信号开关sq1、第一抵板的作用是,能够不管在任何地面情况下,使得上料斗到达地面时、搅拌机上的钢丝拉绳会松开对靠轮的压动,从而悬架会逆时针旋动,从而利用第一抵板压住第一触碰信号开关sq1,从而切断带动上料斗翻转的电机电源,从而使得带动上料斗旋转钢丝拉绳停止拉动,避免传统方式混凝土搅拌机的上料斗通过电机转数控制上料斗下降高度而容易造成钢丝拉绳缠绕一起的问题。
3、进一步完善,横向圆杆上套接有一对相对设置的第一圆管,两第一圆管上均固定有第一支撑板,两第一支撑板上分别固定有第二触碰信号开关sq2及第三触碰信号开关sq3;第一支撑板的逆时针方向侧设有一对相对设置的第二支撑板,横向圆杆上套接有一对分别与两第二支撑板固定一起的第二圆管,两第二支撑板上分别固定有第四触碰信号开关sq4及第五触碰信号开关sq5;第二支撑板的逆时针方向侧设有第三支撑板,第三支撑板固定在横向圆杆上,第三支撑板上固定有第六触碰信号开关sq6;两第一支撑板之间固定有用于第四触碰信号开关sq4及第五触碰信号开关sq5触碰的第二抵板,两第二支撑板之间固定有用于第六触碰信号开关sq6触碰的第三抵板,横向圆杆上套接有第四圆管,第四圆管的内端固定有位于第一支撑板顺时针方向的拨动抵板,第四圆管的外端固定有与搅拌机上料斗配合的拨杆,第二圆管上安装有使第二支撑板呈顺时针复位的扭簧,第二支撑板与第三支撑板之间系固有限位拉绳,机壳内固定有plc控制器,plc控制器与第一触碰信号开关sq1、第二触碰信号开关sq2、第三触碰信号开关sq3、第四触碰信号开关sq4、第五触碰信号开关sq5、第六触碰信号开关sq6线路连接一起。使用时,先把拨杆固定在上料斗处,随后利用推车把砂石料及水泥倒入到上料斗(图中未画出)处,随后,启动上料斗电机(图中未画出),从而带动上料斗翻转,上料斗翻转会带动拨杆23同步跟着翻转,拨杆翻转后会带动拨动抵板22同步跟着翻转,拨动抵板翻转首先触碰到第二触碰信号开关sq2及第三触碰信号开关sq3,这时,第二触碰信号开关sq2会给予搅拌滚筒加水的信号,第三触碰信号开关sq3为上料斗上升保护信号开关(确保上料斗只往上,这时触碰第一触碰信号开关sq1时、第一触碰信号开关sq1不起作用),第三触碰信号开关sq3与第一触碰信号开关sq1为择一通路,当第三触碰信号开关sq3通路时、第一触碰信号开关sq1的信号会呈始终断开状,由于钢丝拉绳拉动上料斗上翻时、钢丝拉绳呈张紧状,所以会带动靠轮顺时针方向压动,进而第一抵板不会触碰到第一触碰信号开关sq1,当上料斗继续通过钢丝拉绳拉动进行上翻并使得第二抵板同时触碰到第四触碰信号开关sq4及第五触碰信号开关sq5时、进水管停止加水,并且两第二支撑板在到达触碰到第六触碰信号开关sq6的80%的位置时、停1秒再上升1秒,再停1秒上升1秒……(上料斗也是停1秒再上升1秒,再停1秒上升1秒确保上料斗里面的搅拌料能够被抖动而全部倒入到搅拌机的搅拌滚筒内),直到第三抵板触碰到第六触碰信号开关sq617,从而上料斗停止翻转,上料斗停几秒后,plc控制器控制上料斗电机反转,从而使得钢丝拉绳在带动下料斗下翻时有一小段时间呈松状态,从而不会对靠轮施压力,进而会使悬架下翻,并会造成第一抵板触碰到第一触碰信号开关sq1,由于第一触碰信号开关sq1与第三触碰信号开关sq311为择一通路,所以这时第一触碰信号开关sq1为上料斗下降保护信号开关(确保上料斗只往下,这时触碰第三触碰信号开关sq3时、第三触碰信号开关sq311不起作用),当上料斗电机反转一小会儿后,使呈松状态的钢丝拉绳会再次被拉紧并压紧在靠轮,从而会再次带动悬架外移,从而使得第一抵板脱离对第一触碰信号开关sq1的压动,这时、呈下降保护状态的上料斗一直下翻,当下料斗触碰到地面时、这时钢丝拉绳由于不受拉力作用,会呈松状态,从而使得钢丝拉绳不对靠轮施压力,从而悬架下翻并使得第一抵板再次压动第一触碰信号开关sq1,从而给予搅拌机上的上料斗电机停止运行信号,从而避免传统方式混凝土搅拌机的上料斗通过电机转数控制上料斗下降高度而容易造成钢丝拉绳缠绕一起发生故障的问题;本方案中的 plc 控制器为市面上通用的可编程逻辑控制器,可选用市面上通用的三菱 plc、施耐德 plc、犹尼康 unitronics、台达 plc 和松下 plc 等品牌 ;此外,该 plc 控制器的程序设定与市面上通过的设定方法原理基本一致,普通技术人员可根据加工速度和效率要求自行设定程序指令,方面快捷。
4、进一步完善,横向圆杆上套接有一对相对设置的第五圆管,两第五圆管上均固定有第四支撑板,两第四支撑板上分别固定有第七触碰信号开关sq7及第八触碰信号开关sq8;第四支撑板的逆时针方向侧设有一对相对设置的第五支撑板,横向圆杆上套接有一对分别与两第五支撑板固定一起的第六圆管,两第六圆管上分别固定有第九触碰信号开关sq9及第十触碰信号开关sq10;第五支撑板的逆时针方向侧设有第六支撑板,第六支撑板固定在横向圆杆上,第六支撑板上固定有第十一触碰信号开关sq11;两第四支撑板之间固定有用于第九触碰信号开关sq9及第十触碰信号开关sq10触碰的第四抵板,两第五支撑板之间固定有用于第十一触碰信号开关sq11触碰的第五抵板,横向圆杆上套接有第七圆管,第七圆管的内端固定有位于第四支撑板顺时针方向的第一拨动抵板,第七圆管的外端固定有与搅拌机上料斗配合的第一拨杆,第六圆管上安装有使第五支撑板呈顺时针复位的第一扭簧,第五支撑板与第六支撑板之间系固有第一限位拉绳;机壳内设有上水控制线路机构、上料斗控制线路机构及滚筒控制线路机构;上水控制线路机构包括第一电线,第一电线上安装有第一中继电器ka1,第八触碰信号开关sq8安装在第一电线上并位于第一中继电器ka1的侧端,第八触碰信号开关sq8的侧端设有安装在第一电线上的第一时间继电器kt1,第一时间继电器kt1的侧端设有安装在第一电线上的第一动作接触器线圈km1,第八触碰信号开关sq8的左侧及第一动作接触器线圈km1的右侧之间并联有第二电线,第二电线上安装有第一动作接触器km1,第一动作接触器km1的右侧设有安装在第二电线上的第一时间继电器线圈kt1,第八触碰信号开关sq8的左右两侧及第一动作接触器km1的左右两侧同时并联有第三电线,第三电线上安装有上水手动按钮sb2,第一中继电器ka1的左侧及第一动作接触器线圈km1的右侧并联有第四电线,第四电线上安装有第一总停开关sb1及侧端设有安装在第四电线上的第一中继电器线圈ka1;上料斗控制线路机构包括第五电线,第五电线上安装有第二中继电器ka2,第二中继电器ka2的侧端依顺序依次设有安装在第五电线上的上升开关sb7、第四接触器km4及第二动作接触器线圈km2,第十一触碰信号开关sq11、第十触碰信号开关sq10均安装在第五电线处并位于第二中继电器ka2与上升开关sb7之间,上升开关sb7与第四接触器km4之间并联有第六电线,第六电线上安装有第二动作接触器km2,第十触碰信号开关sq10与第六电线之间并联有第七电线,第七电线上安装有第二时间继电器kt2,第二时间继电器kt2左侧的第七电线与第五电线之间并联有第八电线,第八电线上安装有第二时间继电器线圈kt2,第十一触碰信号开关sq11左侧的第五电线与第八电线之间并联有第九电线,第九电线上从左往右依次安装有第九按压开关sb9、第三时间继电器kt3及第三动作接触器线圈km3,第九按压开关sb9的正、负极上安装有第三动作接触器km3,第三时间继电器kt3左侧第九电线处与第三动作接触器km3右侧第九电线之间连接有第十电线,第十电线上安装有第三时间继电器线圈kt3,第九按压开关sb9左侧第五电线与第三时间继电器线圈kt3右侧第十电线之间连接有第十一电线,第十一电线从左往右依次安装有第四动作接触器km4、第二接触器km2及第四动作接触器线圈km4,第一触碰信号开关sq1安装在第十一电线处并位于第四动作接触器km4与第二接触器km2之间,第十一触碰信号开关sq11与第十一电线之前安装有第十二电线,第十二电线在第十一电线的连接端位于第一触碰信号开关sq1与第二接触器km2之间,第三时间继电器kt3还安装在第十二电线处,第九触碰信号开关sq9安装在第十二电线处并位于第三时间继电器kt3的右侧,两第三时间继电器kt3之间连接有第十三电线,第十三电线与第十电线连接一起,第九触碰信号开关sq9左侧的第十二电线处与第九按压开关sb9左侧第九电线之间安装有第十四电线,第十四电线与第十一电线线路连接一起,第十四电线上安装有第八下降开关sb8,第五电线左、右侧之间并联有第二十二电线,第二十二电线上安装有第六总停开关sb6及第二中继电器线圈ka2;滚筒控制线路机构包括第二十三电线,第二十三电线上从左往右依次安装有第三按动开关sb3、第三中继电器ka3、第四出料开关sb4,第二十三电线的侧边设有第二十四电线,第二十四电线上安装有第四时间继电器线圈kt4,第二十三电线的下方设有第二十五电线,第二十五电线从左往右依次安装有第五中继电器km5、第四时间继电器kt4、第六中继电器km6及第五继电器线圈km5,第九触碰信号开关sq9安装在第二十五电线处并位于第五中继电器km5的左侧,第九触碰信号开关sq9左侧及第五中继电器km5右侧均连接有连接在第四出料开关sb4左、右侧第二十三电线上的第一连接电线,第四时间继电器kt4左侧及第五继电器线圈km5右侧均连接有连接在第四时间继电器线圈kt4左、右侧第二十四电线上的第二连接电线,第九触碰信号开关sq9与第五继电器线圈km5之间连接有第二十六电线,第二十六电线上安装有第五时间继电器线圈kt5,第一连接电线与第二十六电线之间连接有第二十七电线,第二十七电线从左往右依次安装有第六动作接触器km6、第六时间继电器kt6、第五动作接触器km5及第六动作接触器线圈km6,第二十六电线与第一连接电线之间连接有第二十八电线,第二十八电线与第六动作接触器km6右侧处的第二十七电线连接,第二十八电线的上安装有第五搅拌开关sb5,第六时间继电器kt6左侧处的第二十七电线与第五时间继电器线圈kt5右侧处的第二十六电线之间连接有第二十九电线,第二十九电线上安装有第六时间继电器线圈kt6,第三中继电器ka3左侧处的第二十三电线与第四时间继电器线圈kt4右侧处的第二十四电线之间连接有第三十电线,第三十电线上安装有按钮停止开关及第三中继电器线圈ka3。上水控制线路机构电路图解说:接通电源,
5、1:电流通过第一中继电器ka1闭触头,通过第一总停开关sb1常闭触头,到达上水手动按钮sb2常开触头,按一下上水手动按钮sb2,电流通过上水手动按钮sb2闭合处,到达第一时间继电器线圈kt1通电,并计时开始,同时电流通过第一时间继电器kt1常闭触头,到达第一动作接触器线圈km1通电, 从而使得第一动作接触器km1常开辅助触头闭合,自保线路形成,电流从l1通过第一动作接触器线圈km1到达l2并保持通电,上水开始并保持;当第一时间继电器线圈kt1通电计时到点,第一时间继电器kt1触头断开,第一动作接触器线圈km1断电,从而使得,第一动作接触器km1常开辅助触头复位,上水停止。
6、 2:电流通过第一中继电器ka1常闭触头,通过第一总停开关sb1常闭触头,到达第八触碰信号开关sq8,触碰第八触碰信号开关sq8,电流通过第八触碰信号开关sq8闭合处,到达第一时间继电器线圈kt1通电,并计时开始,同时电流通过第一时间继电器kt1常闭触头,到达第一动作接触器线圈km1通电, 从而使得第一动作接触器km1常开辅助触头闭合,自保线路形成,电流从l1通过第一动作接触器线圈km1到达l2并保持通电, 上水开始并保持;当第一时间继电器线圈kt1通电计时到点,第一时间继电器kt1触头断开,第一动作接触器线圈km1断电,从而使得,第一动作接触器线圈km1常开辅助触头复位,上水停止。
7、上料斗控制线路机构料斗上升下降控制回路电路图解说:
8、接通电源,l1电流通过第六总停开关sb6常闭触头,通过第二中继电器ka2常闭触头,通过第十一触碰信号开关sq11上止行程常闭触头,通过第十触碰信号开关sq10行程常闭触头,到达上升开关sb7,按下上升开关sb7,电流通过闭合触头,通过第四动作接触器km4常闭辅助触头,到达第二动作接触器线圈km2通电,从而使得第二动作接触器km2常开辅助触头闭合,l1电流通过第二动作接触器线圈km2到达l2,自保线路形成,保持上升;在上升过程中,触碰第十触碰信号开关sq10,第十触碰信号开关sq10常闭触头断开,第二动作接触器线圈km2断电,上升停止,第十触碰信号开关sq1036常开触头闭合,电流通过闭合触头,到达第二时间继电器kt2并计时三秒后,第二时间继电器kt2常开触头闭合,电流通过闭合触头,通过长第四动作接触器km4常闭辅助触点,到达第二动作接触器线圈km2通电,第二时间继电器kt2常开触头保持闭合,l1电流通过第二动作接触器线圈km2到达l2,保持线路形成,上升保持,继续上升;
9、上升过程中触碰第十一触碰信号开关sq11上止行程,第十一触碰信号开关sq11常闭触头断开,第二动作接触器线圈km2断电,上升停止,同时,第十一触碰信号开关sq11常开触头闭合,电流通过闭合触头,到达第三时间继电器kt3,并开始计时(8至16秒),并同时电流通过第三时间继电器kt3常闭触头,到达第三动作接触器线圈km3(振动接触器线圈)通电,振动开始,当第三时间继电器kt3计时8至16秒,时间到时第三时间继电器kt3常闭触头断开,第三动作接触器线圈km3断电,振动停止,并同时,第三时间继电器kt3常开触头闭合,电流通过闭合触头,通过第一触碰信号开关sq1下止行程常闭开关,通过第二动作接触器km2常闭辅助触头,到达第四动作接触器线圈km4(下降接触器线圈)通电,从而使得第四动作接触器km4常开辅助触头闭合,自保线路形成,下降保持;
10、在下降中,触碰第一触碰信号开关sq1下止行程开关,第一触碰信号开关sq161常闭触头断开,第四动作接触器线圈km4断电,下降停止。
11、在下降启动时,电流通过第六总停开关sb6,通过第二中继电器ka2,通过第十一触碰信号开关sq11常开触头,通过第三时间继电器kt3常开触头,按住行程第九触碰信号开关sq9常开触头,电流通过第九触碰信号开关sq9,通过第二动作接触器km2常闭辅助触头,到达第四动作接触器线圈km4,从而使得第四动作接触器线圈km4辅助触头闭合,自保线路形成,下降保持接通电源,电流通过第六总停开关sb6常闭触头,通过第二中继电器ka2常闭触头,到达第九按压开关sb9(振动起动按钮),按下第九按压开关sb9,电流通过第九按压开关sb9,通过第三时间继电器kt3常闭触头,到达第三动作接触器线圈km3通电,使得第三动作接触器线圈km3常开自保触头闭合,自保路线形成,振动保持,当第三时间继电器kt3计时(8至16秒)后,使得第三动作接触器km347-16常闭触头断开,第三动作接触器km3断电,振动停止,在上升和下降中途,需停止,按第六总停开关sb6,立即停止;接通电源,电流通过第六总停开关sb6常闭触头,通过第二中继电器ka2常闭触头,到达第八下降开关sb8,按下第八下降开关sb8,电流通过第八下降开关sb8,通过第一触碰信号开关sq1常闭触头,通过第二动作接触器km2常闭触头,到达第四动作接触器线圈km4通电,使得第四动作接触器线圈km4常开自保触头闭合,l1电流通过第四动作接触器线圈km4到达l2,自保路线形成,下降启动并保持。
12、搅拌,出料滚筒控制线路机构电路线图解说:
13、接通电源,电流通过第三按动开关sb3停止按钮,通过第三中继电器ka3常闭触头,电流到达第九触碰信号开关sq9处,触碰第九触碰信号开关sq9常闭触头断开,出料停止,第九触碰信号开关sq9常开触头闭合,电流通过第九触碰信号开关sq9闭合触头,到达第五时间继电器线圈kt5通电,计时开始,延时一秒,第五时间继电器线圈kt5常开触头闭合,电流通过,闭合触头,到达第三中继电器线圈ka3通电,计时开始,电流通过第六动作接触器km6常闭辅助触头,再通过第五中继电器km5常闭辅助触头,到达第六动作接触器线圈km6通电,使得第六动作接触器km6常开辅助触头闭合,电流通过闭合触头,通过第三中继电器ka348-3常闭触头,通过第三按动开关sb3停止按钮,回到l1,搅拌保持, 第六动作接触器km648-18延时36秒动作,计时到,第六动作接触器km6闭辅助触头断开,第六动作接触器线圈km6断电, 第六动作接触器km648-17常开辅助触头断开,搅拌停止;
14、接通电源,电流通过第三按动开关sb3停止按钮,通过第三中继电器ka3常闭触头,到达第五搅拌开关sb5搅拌启动按钮,按下第五搅拌开关sb5,电流通过第五搅拌开关sb5,接通第六时间继电器线圈kt6,开始计时,同时,电流通过第六时间继电器kt6常闭延时触头,通过第五动作接触器km5常闭辅助触头,到达第六动作接触器线圈km6通电,使得第六动作接触器km6常开辅助触头闭合,电流通过闭合触头,通过第三中继电器ka3常闭触头,第三按动开关sb3常闭触头,回到l1,第六动作接触器km6通电保持,搅拌启动,保持搅拌,第六时间继电器kt6(36秒)计时到,第六时间继电器kt6常闭辅助触头断开,第六动作接触器线圈km6断电,第六动作接触器km6常开并辅助触头断开,搅拌停止;
15、接通电源电流,通过第三按动开关sb3停止按钮,通过第三中继电器ka3常闭触头,到达第四出料开关sb4(出料启动按钮),按下第四出料开关sb4,电流通过第四出料开关sb4,到达第四时间继电器线圈kt4通电,从而使得第四时间继电器线圈kt4开始工作(计时18秒),同时,电流通过第四时间继电器线圈kt46常闭触头,通过第六中继电器km6(搅拌接触器)常闭辅助触头,到达第五中继电器km5(出料接触器线圈)通电,使得第五中继电器km5常开辅助触头闭合,电流通过闭合触头,通过第九触碰信号开关sq9(行程开关)常闭触头,通过第三中继电器ka3常闭触头,通过第三按动开关sb3常闭触头,到达l1,回路保持,一直保持启动出料,当第四时间继电器kt4计时到18秒,第四时间继电器kt4常闭辅助触头断开,从而使得第五继电器线圈km5断电,从而使得第五中继电器km5常开辅助触头复位,出料停止。
16、进一步完善,第一支撑板与第三支撑板之间固定有限位拉动件。这里限位拉动件的作用是,用于切断上料斗下降到位后的电机运作信号。
17、进一步完善,限位拉动件为铁链。这里限位拉动件为铁链的作用是,方便安装及调整第一支撑板相较于第三支撑板之间的间距,从而适应于不同工况下的地面高度切断信号。
18、进一步完善,第四支撑板与第六支撑板之间固定有第一限位拉动件。这里第一限位拉动件的作用是,用于切断上料斗下降到位后的电机运作信号。
19、进一步完善,第一限位拉动件为铁链。这里第一限位拉动件为铁链的作用是,方便安装及调整第四支撑板相较于第六支撑板之间的间距,从而适应于不同工况下的地面高度切断信号。
20、进一步完善,第一触碰信号开关sq1、第二触碰信号开关sq2、第三触碰信号开关sq3、第四触碰信号开关sq4、第五触碰信号开关sq5、第六触碰信号开关sq6均采用8108行程开关。这里第一触碰信号开关sq1、第二触碰信号开关sq2、第三触碰信号开关sq3、第四触碰信号开关sq4、第五触碰信号开关sq5、第六触碰信号开关sq6均采用8108行程开关的作用是,能够方便利用8108行程开关触碰解锁,从而调节信号开断操作。
21、进一步完善,第一触碰信号开关sq1、第七触碰信号开关sq7、第八触碰信号开关sq8、第九触碰信号开关sq9、第十触碰信号开关sq10、第十一触碰信号开关sq11均采用8108行程开关。这里第一触碰信号开关sq1、第七触碰信号开关sq7、第八触碰信号开关sq8、第九触碰信号开关sq9、第十触碰信号开关sq10、第十一触碰信号开关sq11均采用8108行程开关的作用是,能够方便利用8108行程开关触碰解锁,从而调节信号开断操作。
22、进一步完善,plc控制器内集成有无线遥控模块。这里无线遥控模块能够使得使用者通过遥控器发出指令并对搅拌机进行操作;这里无线遥控模块为市面上现有的产品,可选用深圳市华普微电子有限公司、深圳市振浩微电子有限公司等公司的产品。
23、本实用新型有益的效果是:本实用新型结构设计巧妙、合理,利用机壳、横向圆杆、悬架、靠轮、支撑托架、第一触碰信号开关sq1、第一抵板能够不管在任何地面情况下,使得上料斗到达地面时、搅拌机上的钢丝拉绳会松开对靠轮的压动,从而悬架会逆时针旋动,从而利用第一抵板压住第一触碰信号开关sq1,从而切断带动上料斗翻转的电机电源,从而使得带动上料斗旋转钢丝拉绳停止拉动,避免传统方式混凝土搅拌机的上料斗通过电机转数控制上料斗下降高度而容易造成钢丝拉绳缠绕一起的问题,本实用新型能够在不同工况下对下料斗放下复位进行停止,本实用新型也能够一人控制多台设备,砂石料及水泥位于上料斗处时、能够自动的进行加水、停水、抖料,停料,上料斗自动复位,从而达到一人能多台设备操作,效率高,成本低,值得推广应用。
- 还没有人留言评论。精彩留言会获得点赞!