线锯单元及线切割机的制作方法
1.本技术涉及一种硬脆材料切割设备技术,尤其涉及一种线锯单元及线切割机。
背景技术:
2.切片机是一种通过切割线将硬脆材料棒切割成薄片的设备。目前切片机包括:切割主辊、转向机构、张力机构、排线机构及收放线机构,切割线从收放线机构绕出后依次经过排线机构、张力机构、转向机构进入切割主辊,切割线在切割主辊上绕设多圈形成切割线网用于对硬脆材料棒进行切割。排线机构在移动过程中将切割线均匀绕设于收放线机构或将收放线机构上绕设的切割线均匀释放;张力机构中的张力轮用于调节切割线的张力;转向机构用于改变切割线的方向,以将从切割主辊绕出的切割线引至张力机构。通常,在上述各机构之间还设有多个过轮,用于对切割线进行支撑。
3.传统的切片机中切割线在切割主辊到收放线机构之间往复移动需要经过6 个以上线轮,线轮数量太多会导致线轮间的共面性较差,且线轮的转动惯量、转动阻力等因素会对切割线张力的稳定性造成不利影响。线轮数量太多也会造成整个切片机的附加张力很大,进而导致切割线的张力波动幅值较大,进一步降低了张力的稳定性。
4.通常情况下,张力机构能够提供给切割线的张力=切割线静态破断力-张力波动幅值。张力波动幅值太大造成张力机构能够提供给切割线的张力降低,而张力机构能够提供给切割线的张力降低,切割线张力降低会降低切割线的切割能力,最终影响切割效率。
5.另外,切割线逐步细线化发展,切割线的破断张力越来越小,线轮惯量、转动阻力及共面性差等因素所引起的张力波动占比越来越高,对张力机构的控制精度要求也越来越高。若前述导轮因素导致的张力波动幅度和附加张力保持不变的话,则切割线的切割能力将进一步降低,难以保证切割质量,阻碍切割线细线化的发展。
技术实现要素:
6.为了解决上述技术缺陷之一,本技术实施例中提供了一种线锯单元及线切割机。
7.根据本技术实施例的第一个方面,提供了一种线锯单元,包括:
8.切割机构,所述切割机构上绕设有切割线;
9.张力机构,包括用于调节切割线张力的张力轮,所述张力轮与切割机构对应设置,以使切割机构绕出的切割线导向至张力轮,或张力轮绕出的切割线导向至切割机构;
10.收放线机构,包括用于储存或释放切割线的收放线辊,以使切割线在收放线机构、张力机构和切割机构之间往复移动。
11.根据本技术实施例的第二个方面,提供了一种线切割机,包括:如上所述的线锯单元。
12.本技术实施例提供的技术方案,采用切割机构、张力机构及收放线机构,其中,切割机构上绕设有切割线;张力机构包括用于调节切割线张力的张力轮,张力轮与切割机构对应设置,以使切割机构绕出的切割线导向至张力轮,或张力轮绕出的切割线导向至切割
机构;收放线机构包括用于储存或释放切割线的收放线辊,以使切割线在收放线机构、张力机构和切割机构之间往复移动。上述方案中,张力机构与切割机构之间不再需要传统方案中的换向机构,一方面减少了零部件数量和维护次数,降低安装复杂度,还有利于减轻自重;另一方面切割线不再经过换向轮,减少了切割线经过的线轮数量,克服了传统方案因各线轮共面度、线轮转动惯量、线轮转动阻力等因素导致张力稳定性低的问题,降低了切割线张力波动幅度,进而降低了切割线的附加张力,提高了张力机构能够施加给切割的张力,提高了切割线的切割能力,提高了线网张力的稳定性,以使切割线的张力满足切割要求,保障切割质量及效率,进而提高成品率及生产效率,满足切割线细线化的要求,降低硅损,提高硅棒的利用率。
附图说明
13.此处所说明的附图用来提供对本技术的进一步理解,构成本技术的一部分,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
14.图1为本技术实施例提供的切片机的结构示意图;
15.图2为本技术实施例提供的切片机的轴向视图;
16.图3为本技术实施例提供的线锯单元中切割机构、张力机构及收放线机构的简略视图;
17.图4为本技术实施例提供的线锯单元中切割主辊与张力轮的线槽对应的俯视图;
18.图5为本技术实施例提供的线锯单元中切割主辊与张力轮的线槽对应的另一种情况的俯视图;
19.图6为本技术实施例提供的线锯单元中切割主辊与张力轮的线槽对应的又一种情况的俯视图;
20.图7为本技术实施例提供的线锯单元中张力轮与收放线辊对应的结构示意图;
21.图8为本技术实施例提供的线锯单元中张力轮与收放线辊对应的另一结构示意图;
22.图9为本技术实施例提供的线锯单元的第一种布局示意图;
23.图10为图9所示线锯单元的左视图(收放线机构等高);
24.图11为图9所示线锯单元的左视图(收放线机构上下布置);
25.图12为本技术实施例提供的线锯单元的第二种布局示意图;
26.图13为本技术实施例提供的线锯单元的第三种布局示意图;
27.图14为本技术实施例提供的线锯单元的第四种布局示意图;
28.图15为本技术实施例提供的线锯单元的第五种布局示意图;
29.图16为本技术实施例提供的线锯单元的第六种布局示意图;
30.图17为本技术实施例提供的线锯单元的第七种布局示意图;
31.图18为本技术实施例提供的线锯单元的第七种布局的俯视示意图;
32.图19为本技术实施例提供的线锯单元的第八种布局示意图;
33.图20为本技术实施例提供的线锯单元的第八种布局的俯视示意图;
34.图21为本技术实施例提供的线锯单元的第九种布局示意图;
35.图22为本技术实施例提供的线锯单元的第九种布局的俯视示意图;
36.图23为本技术实施例提供的线锯单元的第十种布局示意图;
37.图24为本技术实施例提供的线锯单元的第十一种布局示意图;
38.图25为本技术实施例提供的线锯单元的第十二种布局示意图;
39.图26为本技术实施例提供的线锯单元的第十二种布局的另一绕线示意图;
40.图27为本技术实施例提供的线锯单元的第十三种布局示意图;
41.图28为本技术实施例提供的线锯单元的第十三种布局的另一绕线示意图。
42.附图标记:
43.1-切割机构;11-切割主辊;111-切割线槽;
44.2-张力机构;21-张力轮;211-张力线槽;22-张力驱动器;
45.3-收放线机构;31-收放线辊;32-收放线转动驱动器;
46.4-切割框架;
47.5-进给机构;
48.6-硅棒;
49.7-切割线。
具体实施方式
50.为了使本技术实施例中的技术方案及优点更加清楚明白,以下结合附图对本技术的示例性实施例进行进一步详细的说明,显然,所描述的实施例仅是本技术的一部分实施例,而不是所有实施例的穷举。需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。
51.本实施例提供一种线锯单元,可应用于线切割机中对工件进行切割。工件可以为单晶硅材料棒、多晶硅材料棒、蓝宝石棒、磁材棒等硬脆材料棒。本实施例以硅材料棒为例(下面简称:硅棒),对线锯单元及线切割机进行详细说明。本领域技术人员也可以将本实施例所提供的方案应用于对其他材料棒进行切割。
52.线切割机可以为截断机、开方机或切片机,其中截断机用于将较长的硅棒切成长度较短的硅棒;开方机用于将横截面为圆形的切成横截面为矩形的硅棒;切片机用于将横截面为矩形的硅棒切成薄片。本实施例以切片机为例,对线锯单元进行详细说明。本领域技术人员也可以将本实施例提供的方案应用于其他的线切割机。
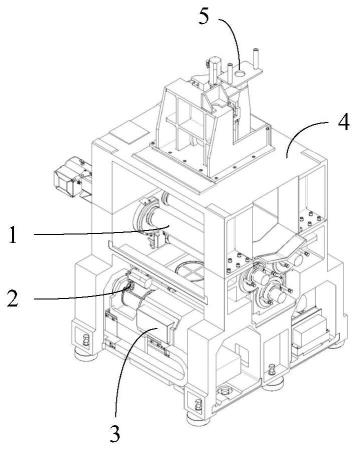
53.图1为本技术实施例提供的切片机的结构示意图,图2为本技术实施例提供的切片机的轴向视图,图3为本技术实施例提供的切片机中切割机构、张力机构及收放线机构的简略视图。如图1和图2所示,本实施例提供一种线锯单元,可应用于切片机。线锯单元包括:切割机构1、张力机构2和收放线机构 3,均设置于切割框架4上。
54.切割机构1上绕设有切割线,用于对硅棒进行切割。一种实施方式为:切割机构1包括至少两个切割转动件。对于截断机和开方机而言,切割转动件具体为切割线轮;对于切片机而言,切割转动件具体为切割主辊11。至少两个切割转动件上绕设切割线7,切割转动件之间的切割线段作为切割线网。
55.切割框架上还设有进给机构5,硅棒6固定在进给机构5上,进给机构5 驱动硅棒6朝向切割线网移动,切割线网对硅棒6进行切割。以图1至图3所示的切片机为例,三个切割主辊11平行且排布成三角形,进给机构5驱动硅棒6向下移动,通过上方两个切割主辊11顶
部绕设的切割线对硅棒6进行切割,将硅棒6切成薄片。图1至图3所示的切片机仅为一种示例,切割主辊11 的数量及排布也可以为其他形式,进给机构5的驱动方向也可以为向上移动或水平移动。
56.张力机构2包括用于调节切割线张力的张力轮,张力轮与切割机构对应设置,以使切割机构绕出的切割线导向至张力轮,或张力轮绕出的切割线导向至切割机构。
57.收放线机构3包括用于储存或释放切割线的收放线辊,以使切割线在收放线机构、张力机构和切割机构之间往复移动,形成单线往复移动对硅棒进行切割。
58.本实施例提供的技术方案,采用切割机构、张力机构及收放线机构,其中,切割机构上绕设有切割线;张力机构包括用于调节切割线张力的张力轮,张力轮与切割机构对应设置,以使切割机构绕出的切割线导向至张力轮,或张力轮绕出的切割线导向至切割机构;收放线机构包括用于储存或释放切割线的收放线辊,以使切割线在收放线机构、张力机构和切割机构之间往复移动。上述方案中,张力机构与切割机构之间不再需要传统方案中的换向机构,一方面减少了零部件数量和维护次数,降低安装复杂度和维护次数,还有利于减轻自重;另一方面切割线不再经过换向轮,减少了切割线经过的线轮数量,也克服了传统方案因各线轮共面度、线轮转动惯量、线轮转动阻力等因素导致张力稳定性低的问题,降低了切割线张力波动幅度,进而降低了切割线的附加张力,提高了张力机构能够施加给切割的张力,提高了切割线的切割能力,提高了线网张力的稳定性,以使切割线的张力满足切割要求,保障切割质量及效率,进而提高成品率及生产效率,满足切割线细线化的要求,降低硅损,提高硅棒的利用率。
59.具体的,切割主辊11的横截面为圆形,其外周面设有多个用于容纳切割线的切割线槽,切割线从一个切割主辊11的切割线槽进入另一个切割主辊11 的切割线槽,按顺序逐圈缠绕形成切割线网。切割线可从任一切割主辊11上的任一切割线槽绕进切割机构1,或绕出切割机构1,将绕进或绕出切割线的切割线槽称为目标切割线槽。例如:对于图3所示的三辊结构,切割线从下方切割主辊11一端的目标切割线槽绕进该切割主辊11,然后沿顺时针或逆时针在三个切割主辊11上缠绕,最后从下方切割主辊11另一端的目标切割线槽绕出。
60.张力机构2设置于切割机构1的侧面,具体包括:张力轮21和用于驱动张力轮21摆动的张力驱动器22(如图4)。张力轮21设有用于容纳切割线的张力线槽,张力线槽与切割主辊11上的目标切割线槽对应,以使切割线7从张力轮21的一侧绕出后直接进入切割主辊11上的该切割线槽。具体的,张力线槽与切割主辊11上的目标切割线槽对应,以使从目标切割线槽绕出的切割线导向至张力线槽,或从张力线槽绕出的切割线导向至目标切割线槽。
61.另外,张力轮21摆动能够调节切割线的张力,切割线保持一定的张力才能对硅棒进行切割。
62.图4为本技术实施例提供的线锯单元中切割主辊与张力轮的线槽对应的结构示意图,图4为俯视图。如图4所示,切割主辊11设有多个切割线槽111,张力轮21设有张力线槽211。切割线槽111与张力线槽211对应设置,以使切割线从该切割线槽111绕出后直接绕进张力线槽211,或从张力线槽211绕出后直接绕进切割线槽111。
63.如图7和图8所示,收放线机构3包括收放线辊31及收放线转动驱动器,收放线转动驱动器用于驱动收放线辊31转动。从张力轮21另一侧绕出的切割线7绕设并储存于收放线辊31,收放线辊31上的切割线也可以释放出绕设于张力轮21。
64.上述方案中,收放线辊31上绕设的切割线绕出,经过张力轮21直接进入切割主辊11;从切割主辊11绕出的切割线直接经过张力轮21,然后储存于收放线辊31。张力轮21起到了传统方案中换向轮机构的作用,即:改变从切割主辊绕出的切割线的方向,并引导切割线绕进收放线辊。
65.切割线在收放线机构3、张力机构2和切割机构1之间往复移动,实现对硅棒进行切割。
66.切割主辊11的轴线与张力轮21的轴线可以平行,也可以不平行。对于上述切割线槽111和张力线槽211的对应关系,可以有多种形式:
67.1、进出切割线的切割线槽111(即:目标切割线槽)所形成的平面与张力线槽211所形成的平面平行。在这种情况下,目标切割线槽与张力线槽211可以正对(如图4),也可以错开,只要能保证切割线可绕设于目标切割线槽与张力线槽211并在二者之间顺利移动即可。
68.2、进出切割线的切割线槽111(即:目标切割线槽)所形成的平面与张力线槽211所形成的平面不平行。在这种情况下目标切割线槽与张力线槽211相互靠近的一端对正,也可以错开,只要能保证切割线可绕设于目标切割线槽与张力线槽211并在二者之间顺利移动即可。
69.上述两种情况为张力轮21处于静态时的位置,如图4所示。在切片机运行过程中,张力轮21还存在摆动的情况,进而适应切割线张力的变化,如图 5和图6所示。
70.张力轮21上可以有一个张力线槽,也可以有两个以上张力线槽。当张力轮21设有多个张力线槽时,本实施例中的切割线槽指的是绕设有切割线的张力线槽。
71.图4所示的俯视图中,张力轮21的轴线沿水平方向延伸,或者,张力轮 21的轴线还可以与水平面呈一定角度(如图5和图6所示),该角度可以为锐角也可以为直角。当为直角时,张力轮21的轴线沿竖直方向延伸。一种实施方式为:张力线槽211所在平面与张力轮21的轴线垂直,所以张力轮21的张力线槽211所在平面与切割主辊11上进出切割线的切割线槽111所在平面之间的夹角为[0,90
°
]。
[0072]
图5和图6的区别在于,切割线7从不同的切割线槽111绕进或绕出切割机构1。
[0073]
进一步的,张力机构2还包括:张力轮驱动机构,用于驱动张力轮21沿切割主辊11的轴线方向方向移动,以使张力线槽211能够移动位置以对应不同的切割线槽111。
[0074]
在上述技术方案的基础上,可以在张力轮21与收放线辊31之间设置过轮,用于对张力轮21与收放线辊31之间的切割线进行引导、换向及支撑。
[0075]
或者,可以在收放线机构3与张力机构2之间设置排线机构,排线机构用于引导切割线均与绕设于切割主辊。
[0076]
张力轮21的轴线与收放线辊31的轴线可以平行,也可以垂直,还可以呈其他角度。
[0077]
本实施例提供一种实施方式:张力轮21的张力线槽211与收放线辊31对正,即张力线槽211所在平面朝向收放线机构的投影在收放线辊31上,以使从张力轮21绕出的切割线直接进入收放线辊31,具体的,通过张力轮21将张力线槽绕出的切割线导向至收放线辊31,或将收放线辊31绕出的切割线导向至张力线槽。切割线可储存于收放线辊31。
[0078]
如图7所示,张力轮21的轴线与收放线辊31的轴线平行;或者如图8所示,张力轮21的轴线与收放线辊31的轴线不平行,以使切割线倾斜缠绕于收放线辊31。
[0079]
另一种实施方式:收放线机构3还包括:收放线移动驱动器,用于驱动收放线辊31
沿其轴向方向往复移动,以使从张力轮绕出的切割线均匀储存于收放线辊,或均匀释放收放线辊储存的切割线至张力轮。相当于该收放线机构3 还具有排线的功能,则不再需要采用传统方案中的排线机构,进一步减少了切割线经过的线轮的数量,从而降低切割线的附加张力,尤其适用于切割线较长的情况,确保切割线在收放线辊上缠绕整齐,便于下一次绕出,不打结。
[0080]
本实施例提供一种具体实施方式:张力机构2的数量为两个,一个张力机构2与切割机构1中的一个目标切割线槽对应,另一个张力机构2与切割机构 1中的另一个目标切割线槽对应。收放线机构3的数量为两个,与张力机构2 一一对应,两个收放线机构3交替收线和放线,以使切割线在两个收放线机构 3、两个张力机构2及切割机构1之间往复移动,两个目标切割线槽交替出线、进线。
[0081]
基于上述技术方案,本实施例提供几种实施方式:
[0082]
两组收放线机构3可以分别位于切割机构1的两侧,也可以都位于切割机构1的同一侧。两组张力机构2可以分别位于切割机构1的两侧,也可以都位于切割机构1的同一侧。
[0083]
对于两组收放线机构3都位于切割机构1的同一侧,且两组张力机构2分别位于切割机构1的两侧,本实施例提供两种实施方式:
[0084]
示例一:
[0085]
图9为本技术实施例提供的线锯单元的第一种布局示意图。如图9所示,切割机构1包括至少三个切割主辊11,其中两个切割主辊11在上,至少一个切割主辊11在下。可以采用一个切割主辊11在下方,共三个切割主辊11构成三角形;也可以两个切割主辊11在下方,共四个切割主辊11形成矩形或梯形。图9展示了两个切割主辊11在上一个切割主辊11在下构成三角形。硅棒从上方向下移动,上方两个切割主辊11之间的切割线对硅棒进行切割。
[0086]
在一种状态时,切割线7从上方切割主辊11的顶部或从下方切割主辊11 的底部绕出或绕进。图9中,切割线7从下方切割主辊11的底部绕出或绕进,从切割线的移动方向来看,切割线7从下方切割主辊11的底部绕进切割结构1,并从下方切割主辊11的底部绕出切割结构1;当切割线反向移动时,切割线7从下方切割主辊11的底部绕进切割结构1,并从下方切割主辊11的底部绕出切割结构1。
[0087]
两组张力机构2分别位于切割机构1的两侧,可对称布置。张力轮21位于张力驱动器22的下方,张力驱动器22驱动张力轮21沿图9的左右方向摆动,以调节切割线7的张力。张力轮21顶端低于下方的切割主辊11的底部,以使从切割主辊11向两侧绕出的切割线斜向下绕设于张力轮21。
[0088]
如图9的视图角度,两组收放线机构3均位于张力机构1的左侧。两组收放线机构3可以处于相同高度,也可以处于不同高度。图9所示,与张力机构 1同侧设置的收放线机构3高于另一个收放线机构3,两组收放线机构3均低于张力轮21。
[0089]
上述方案方案使线轮结构更紧凑,节省空间。另外切割线从下方切割主辊的底部直接延伸到张力机构,可以避免切割线穿过切割室门。该方案中,可以在切割框架进行开口,供切割线穿过,对切割框架的开口进行防水处理更简单方便。
[0090]
对于收放线机构3中收放线辊31和收放线转动驱动器32之间的位置关系,可采用多种方式,例如:如图10所示,当两组收放线机构3处于相同高度时,沿着切割主辊11的轴线方向,收放线转动驱动器32在中间,收放线辊 31在两端;或者也可以收放线转动驱动器32
在两端,收放线辊31在中间。如图11所示,当两组收放线机构3处于不同高度时,二者可错开布置,也可以上下布置,例如:沿着切割主辊11的轴线方向,两组收放线机构3中的收放线转动驱动器32处于中间,收放线辊31分别在两端。
[0091]
以图9展示的方案为例,一种绕线方向为:切割线7从上方收放线辊31 绕出后,从左侧绕过张力轮21,然后向右上方延伸,从下方切割主辊11的底部绕进切割机构,沿逆时针方向缠绕在三个切割主辊11上,再从下方切割主辊11的底部绕出切割机构,向右下方延伸绕设于右边的张力轮21,再储存于左边下方的收放线辊31。在切片机运行过程中,切割线沿相同的路径往复移动,即:正向移动时与上述绕线方向相同,反向移动时与上述绕线方向相反。
[0092]
上述将两组收放线机构3放置于切割机构同一侧的方案,便于统一布置收放线机构3,而切割机构3的另一侧空间可以放置切片机的其他设备,例如:电控设备、润滑设备、冷却设备等,能够提高空间利用率。
[0093]
示例二
[0094]
图12为本技术实施例提供的线锯单元的第二种布局示意图。如图12所示,示例二与示例一的区别仅在于切割机构1不同,而张力机构2、收放线机构3 的结构及布局均与示例一相同。
[0095]
具体的,切割机构1包括:两个水平布置的切割主辊11,切割线7从切割主辊11的顶部或底部绕进或绕出切割主辊11。图12展示的方案为切割线7从切割主辊11的底部绕进或绕出切割主辊11。
[0096]
以图12展示的方案为例,一种绕线方向为:切割线7从上方收放线辊31 绕出后,从左侧绕过张力轮21,然后向右上方延伸,从右边切割主辊11的底部绕进切割机构,沿逆时针方向缠绕在两个切割主辊11上,再从左边切割主辊11的底部绕出切割机构,向右下方延伸绕设于右边的张力轮21,再储存于左边下方的收放线辊31。在切片机运行过程中,切割线沿相同的路径往复移动,即:正向移动时与上述绕线方向相同,反向移动时与上述绕线方向相反。
[0097]
本示例所提供的方案,将两组收放线机构3放置于切割机构同一侧的方案,便于统一布置收放线机构3,而切割机构3的另一侧空间可以放置切片机的其他设备,例如:电控设备、润滑设备、冷却设备等,能够提高空间利用率。
[0098]
示例三
[0099]
本示例提供一种两组收放线机构3、两组张力机构2均位于切割机构同一侧的方案。
[0100]
图13为本技术实施例提供的线锯单元的第三种布局示意图。如图13所示,切割机构1包括至少三个切割主辊11,其中两个切割主辊11在上,至少一个切割主辊11在下。图13展示了两个切割主辊11在上,一个切割主辊11在下构成三角形。硅棒从上方向下移动,上方两个切割主辊11之间的切割线对硅棒进行切割。
[0101]
图13中,切割线7分别从上方切割主辊11的顶部和下方切割主辊11的底部绕进或绕出。从切割线的移动方向来看,切割线7从下方切割主辊11的底部绕进切割结构1,并从上方左边的切割主辊11顶部绕出切割结构1;当切割线反向移动时,切割线7从上方左边的切割主辊11顶部绕进切割结构1,并从下方切割主辊11的底部绕出切割结构1。
[0102]
两组张力机构2均位于切割机构1的同一侧,一组张力机构2与一组收放线机构3构成一组线轮组。两线轮组高度不同,位于上方的线轮组中,张力轮 21高于收放线辊31。位于下方的线轮组中,张力轮21低于收放线辊31。
[0103]
如图13的视图角度,两组收放线机构3均位于张力机构1的左侧。两组收放线机构3可以处于相同高度,也可以处于不同高度。图13所示,与张力机构1同侧设置的收放线机构3高于另一个收放线机构3,两组收放线机构3 均低于张力轮21。
[0104]
对于收放线机构3中收放线辊31,收放线辊31的轴线与切割主辊11的轴线呈异面直线。
[0105]
以图13展示的方案为例,一种绕线方向为:切割线7从上方收放线辊31 绕出后,斜向上绕过张力轮21,然后斜向下延伸,从下方切割主辊11的底部绕进切割机构,沿逆时针方向缠绕在三个切割主辊11上,再从上方左边切割主辊11的顶部绕出切割机构,向左下方延伸绕设于下方的张力轮21,再储存于对应的收放线辊31。在切片机运行过程中,切割线沿相同的路径往复移动,即:正向移动时与上述绕线方向相同,反向移动时与上述绕线方向相反。
[0106]
上述将两组收放线机构3和两组张力机构2均放置于切割机构同一侧的方案,便于统一布线。而切割机构3的另一侧空间可以放置切片机的其他设备,例如:电控设备、润滑设备、冷却设备等,能够提高空间利用率。
[0107]
下面几个示例,分别展示了两组收放线机构3分别位于切割机构1的两侧,两组张力机构2分别位于切割机构1两侧的方案。
[0108]
示例一和示例二中,收放线辊31均低于张力轮21。如下示例四、五、六与之区别在于:收放线辊31高于同侧的张力轮21,切割线分别从切割机构1 的两侧绕进或绕出,从切割机构1绕出的切割线向下绕过张力轮21后向上储存于收放线辊31,从收放线辊31绕出的切割线绕过张力轮21后绕进切割机构 1。
[0109]
示例四
[0110]
图14为本技术实施例提供的线锯单元的第四种布局示意图。如图14所示,切割机构1包括两个水平布置的切割主辊11,切割线7从切割主辊11的顶部或底部绕进或绕出。图14展示的方案为切割线7从切割主辊11的底部绕进或绕出。硅棒从上向下移动,两个切割主辊11顶部之间的切割线对硅棒进行切割。
[0111]
从切割线的移动方向来看,切割线7从右边切割主辊11的底部绕进切割结构1,并从左边切割主辊11的底部绕出切割结构1;当切割线反向移动时,切割线7从左边切割主辊11的底部绕进切割结构1,并从右边切割主辊11的底部绕出切割结构1。
[0112]
两组张力机构2分别位于切割机构1的两侧,可对称布置。张力轮21位于张力驱动器22的上方,张力驱动器22驱动张力轮21摆动,以调节切割线7 的张力。张力轮21的轴线与切割主辊11的轴线平行。
[0113]
如图14的视图角度,两组收放线机构3分别位于切割机构1的两侧,可对称布置。张力轮21可位于收放线辊31的外侧,也可以位于收放线辊31的内侧。当张力轮21位于收放线辊31的外侧时,切割线经过张力轮21后向内储存于收放线辊31。两组收放线机构3与切割框架的距离较近,能够减小切片机的体积。收放线辊31的轴线与切割主辊11的轴线平行。
[0114]
以图14展示的方案为例,一种绕线方向为:切割线7从左边的收放线辊 31绕出后,
从左侧绕过张力轮21,然后向右上方延伸,从右边切割主辊11的底部绕进切割机构,沿逆时针方向缠绕在两个切割主辊11上,再从左边切割主辊11的底部绕出切割机构,向右下方延伸绕设于右边的张力轮21,再储存于右边的收放线辊31。在切片机运行过程中,切割线沿相同的路径往复移动,即:正向移动时与上述绕线方向相同,反向移动时与上述绕线方向相反。
[0115]
在上述技术方案的基础上,切割机构1也可以采用三个切割主辊11构成三角形,切割线从下方的切割主辊11底部绕进或绕出切割机构1。三个切割主辊11的排布方式可参照示例一。
[0116]
本示例所提供的方案,张力机构与收放线机构的位置可以灵活调整,以适应切片机的结构布局。且切割线从切割主辊的底部走线,避免在切割室门上进行开口穿线,其实现过程更为简单,也不对切割室门的开关造成影响。
[0117]
示例五
[0118]
图15为本技术实施例提供的线锯单元的第五种布局示意图。如图15所示,与示例四不同的是,示例五中切割线从顶部绕进或绕出切割机构1,并且收放线辊31的位置略有变动。
[0119]
具体的,如图15所示,切割机构1包括两个水平布置的切割主辊11,切割线7从切割主辊11的顶部绕进或绕出。硅棒从上向下移动,两个切割主辊11顶部之间的切割线对硅棒进行切割。
[0120]
从切割线的移动方向来看,切割线7从右边切割主辊11的顶部绕进切割结构1,并从左边切割主辊11的顶部绕出切割结构1;当切割线反向移动时,切割线7从左边切割主辊11的顶部绕进切割结构1,并从右边切割主辊11的顶部绕出切割结构1。
[0121]
两组张力机构2分别位于切割机构1的两侧,可对称布置。力轮21的轴线与切割主辊11的轴线平行。两组收放线机构3分别位于切割机构1的两侧,可对称布置。收放线辊31的轴线与切割主辊11的轴线平行。
[0122]
张力轮21位于收放线辊31的外侧,从切割机构1绕出的切割线从张力轮 21绕过后,在内侧储存于收放线辊31;从收放线辊31绕出的切割线从张力轮绕过后绕进切割机构1。
[0123]
以图15展示的方案为例,一种绕线方向为:切割线7从左边的收放线辊 31绕出后,从左侧绕过张力轮21,然后向右上方延伸,从左边切割主辊11的顶部绕进切割机构,沿顺时针方向缠绕在两个切割主辊11上,再从右边切割主辊11的顶部绕出切割机构,向右下方延伸绕设于右边的张力轮21,再向内向上储存于右边的收放线辊31。在切片机运行过程中,切割线沿相同的路径往复移动,即:正向移动时与上述绕线方向相同,反向移动时与上述绕线方向相反。
[0124]
本示例所提供的方案,张力机构与收放线机构的位置可以灵活调整,以适应切片机的结构布局。且切割线从切割主辊的底部走线,避免在切割室门上进行开口穿线,其实现过程更为简单,也不对切割室门的开关造成影响。
[0125]
示例六
[0126]
图16为本技术实施例提供的线锯单元的第六种布局示意图。如图16所示,示例六与示例五的区别仅在于切割机构1不同,而张力机构2、收放线机构3 的结构及布局均与示
例五相同。
[0127]
具体的,切割机构1包括三个切割主辊11构成三角形,其中两个切割主辊11在上,一个切割主辊11在下。切割线从上方两个切割主辊11的顶部绕进或绕出切割机构1。上方两个切割主辊11之间的切割线用于对从上向下移动的硅棒进行切割。
[0128]
以图16展示的方案为例,一种绕线方向为:切割线7从左边的收放线辊 31绕出后,从左侧绕过张力轮21,然后向右上方延伸,从上方左边切割主辊 11的顶部绕进切割机构,沿顺时针方向缠绕在三个切割主辊11上,再从上方右边切割主辊11的顶部绕出切割机构,向右下方延伸绕设于右边的张力轮 21,再向内向上储存于右边的收放线辊31。在切片机运行过程中,切割线沿相同的路径往复移动,即:正向移动时与上述绕线方向相同,反向移动时与上述绕线方向相反。
[0129]
本示例所提供的方案,张力机构与收放线机构的位置可以灵活调整,以适应切片机的结构布局。且切割线从切割主辊的底部走线,避免在切割室门上进行开口穿线,其实现过程更为简单,也不对切割室门的开关造成影响。
[0130]
下面的示例七、八、九分别提供另一种类型的线锯单元布局方案,张力机构2分别位于切割机构1的两侧,收放线机构3也分别位于切割机构1的两侧。与前述几个示例的区别在于:张力轮21轴线的方向不同,收放线辊31轴线的方向不同。
[0131]
示例七
[0132]
图17为本技术实施例提供的线锯单元的第七种布局示意图,18为本技术实施例提供的线锯单元的第七种布局的俯视示意。如图17和图18所示,切割机构1包括两个水平布置的切割主辊11,切割线7从切割主辊11的顶部或底部绕进或绕出。图17和图18展示的方案为切割线7从切割主辊11的顶部绕进或绕出。硅棒从上向下移动,两个切割主辊11顶部之间的切割线对硅棒进行切割。
[0133]
从切割线的移动方向来看,切割线7从右边切割主辊11的顶部绕进切割结构1,并从左边切割主辊11的顶部绕出切割结构1;当切割线反向移动时,切割线7从左边切割主辊11的顶部绕进切割结构1,并从右边切割主辊11的顶部绕出切割结构1。
[0134]
两组张力机构2分别位于切割机构1的两侧,可对称布置。张力轮21的轴线与切割主辊11的轴线呈相互垂直的异面直线。
[0135]
如图17的视图角度,两组收放线机构3分别位于切割机构1的两侧,可对称布置。收放线辊31的轴线与切割主辊11的轴线呈相互垂直的异面直线。本示例中,同一侧的收放线辊31的轴线与张力轮21的轴线平行。
[0136]
张力轮21可位于收放线辊31的外侧,切割线经过张力轮21后向内储存于收放线辊31。两组收放线机构3与切割框架的距离较近,能够减小切片机的体积。收放线辊31的轴线与切割主辊11的轴线平行。
[0137]
以图17展示的方案为例,一种绕线方向为:切割线7从左边的收放线辊 31绕出后,向左下方倾斜绕过张力轮21,然后向右上方延伸,从左边切割主辊11的顶部绕进切割机构,沿顺时针方向缠绕在两个切割主辊11上,再从右边切割主辊11的顶部绕出切割机构,向右下方延伸绕设于右边的张力轮21,再向内储存于右边的收放线辊31。在切片机运行过程中,切割线沿相同的路径往复移动,即:正向移动时与上述绕线方向相同,反向移动时与上述绕线方向相反。
[0138]
示例八
[0139]
本示例与示例七仅有的区别在于切割机构1不同,而张力机构2、收放线机构3的结构及布局均与示例七相同。
[0140]
图19为本技术实施例提供的线锯单元的第八种布局示意图,图20为本技术实施例提供的线锯单元的第八种布局的俯视示意图。如图19和图20所示,具体的,切割机构1包括三个切割主辊11构成三角形,其中两个切割主辊11 在上,一个切割主辊11在下。切割线从上方两个切割主辊11的顶部绕进或绕出切割机构1。上方两个切割主辊11之间的切割线用于对从上向下移动的硅棒进行切割。
[0141]
以图19展示的方案为例,一种绕线方向为:切割线7从左边的收放线辊 31绕出后,向左下方倾斜绕过张力轮21,然后向右上方延伸,从上方左边切割主辊11的顶部绕进切割机构,沿顺时针方向缠绕在三个切割主辊11上,再从上方右边切割主辊11的顶部绕出切割机构,向右下方延伸绕设于右边的张力轮21,再向内储存于右边的收放线辊31。在切片机运行过程中,切割线沿相同的路径往复移动,即:正向移动时与上述绕线方向相同,反向移动时与上述绕线方向相反。
[0142]
示例九
[0143]
本示例与示例八的区别在于:切割机构1从底部进线及出线,收放线机构 3和张力机构2的位置及角度不同。
[0144]
图21为本技术实施例提供的线锯单元的第九种布局示意图,图22为本技术实施例提供的线锯单元的第九种布局的俯视示意图。如图21和图22所示,切割机构1包括三个切割主辊11构成三角形,其中两个切割主辊11在上,一个切割主辊11在下。切割线从下方切割主辊11的底部绕进及绕出切割机构 1。上方两个切割主辊11之间的切割线用于对从上向下移动的硅棒进行切割。
[0145]
从切割线的移动方向来看,切割线7从下方切割主辊11的底部绕进切割结构1,并从下方切割主辊11的底部绕出切割结构1;当切割线反向移动时,切割线7从下方切割主辊11的底部绕进切割结构1,并从下方切割主辊11的底部绕出切割结构1。
[0146]
两组张力机构2分别位于切割机构1的两侧,可对称布置。张力轮21的轴线与切割主辊11的轴线呈相互垂直的异面直线。
[0147]
如图21的视图角度,两组收放线机构3分别位于切割机构1的两侧,可对称布置。收放线辊31的轴线与切割主辊11的轴线呈相互垂直的异面直线。本示例中,同一侧的张力轮21位于收放线辊31的外侧;同一侧的收放线辊31 的轴线与张力轮21的轴线平行,且沿竖直方向延伸;同一侧的收放线辊31与张力轮21还处于同一高度。沿切割主辊11的轴线方向,两个收放线辊31之间的距离小于两个张力轮21之间的距离。
[0148]
以图21展示的方案为例,一种绕线方向为:切割线7从左边的收放线辊 31绕出后,向左绕过张力轮21,然后向右延伸,从下方切割主辊11的底部绕进切割机构,沿逆时针方向缠绕在三个切割主辊11上,再从下方切割主辊11 的底部绕出切割机构,向右延伸绕设于右边的张力轮21,再向内储存于右边的收放线辊31。在切片机运行过程中,切割线沿相同的路径往复移动,即:正向移动时与上述绕线方向相同,反向移动时与上述绕线方向相反。
[0149]
本示例中,将收放线辊与张力轮放于同一高度,使线锯单元结构更为紧凑,各机构距离较近,缩短切割线绕线长度,进而保证切割线的张力满足切割要求。并且,线锯单元下
方的切割框架空间可以放置其他部件,例如放置电控设备、冷却设备、润滑设备等,提高空间利用率。
[0150]
上述示例七、八、九所提供的方案,张力机构与收放线机构的位置可以灵活调整,以适应切片机的结构布局。且切割线从切割主辊的底部走线,避免在切割室门上进行开口穿线,其实现过程更为简单,也不对切割室门的开关造成影响。
[0151]
下面的示例十、十一、十二、十三分别提供又一种类型的线锯单元布局方案,张力机构2分别位于切割机构1的两侧,收放线机构3也分别位于切割机构1的两侧。与前述几个示例的区别在于:张力轮21高于同侧的收放线辊 31,切割线分别从切割机构向两侧绕进或绕出,从切割机构绕出的切割线绕过张力轮21后向下储存于收放线辊31,从收放线辊31绕出的切割线绕过张力轮绕进切割机构。
[0152]
示例十
[0153]
图23为本技术实施例提供的线锯单元的第十种布局示意图。如图23所示,切割机构1包括两个水平布置的切割主辊11,切割线7从切割主辊11的顶部或底部绕进或绕出。图23展示的方案为切割线7从切割主辊11的顶部绕进或绕出。硅棒从上向下移动,两个切割主辊11顶部之间的切割线对硅棒进行切割。
[0154]
从切割线的移动方向来看,切割线7从右边切割主辊11的顶部绕进切割结构1,并从左边切割主辊11的顶部绕出切割结构1;当切割线反向移动时,切割线7从左边切割主辊11的顶部绕进切割结构1,并从右边切割主辊11的顶部绕出切割结构1。
[0155]
两组张力机构2分别位于切割机构1的两侧,可对称布置。张力轮21的顶端低于切割主辊11的底端。张力驱动器22驱动下方的张力轮21左右摆动调节切割线7的张力。图23中张力轮21的轴线与切割主辊11的轴线平行,或者,张力轮21的轴线与切割主辊11的轴线也可以不平行。
[0156]
两组收放线机构3分别位于切割机构1的两侧,可对称布置。图23中,收放线辊31的轴线与切割主辊11的轴线平行,或者也可以不平行。张力轮21 位于收放线辊31的外侧,切割线经过张力轮21后向内储存于收放线辊31。
[0157]
以图23展示的方案为例,一种绕线方向为:切割线7从左边的收放线辊 31绕出后,向左上方倾斜绕过张力轮21,然后向右上方延伸,从左边切割主辊11的顶部绕进切割机构,沿顺时针方向缠绕在两个切割主辊11上,再从右边切割主辊11的顶部绕出切割机构,向右下方延伸绕设于右边的张力轮21,再向内储存于对应的收放线辊31。在切片机运行过程中,切割线沿相同的路径往复移动,即:正向移动时与上述绕线方向相同,反向移动时与上述绕线方向相反。
[0158]
该示例所提供的方案,张力机构2与收放线机构3的布局较为简单,布线过程也简单。
[0159]
示例十一
[0160]
本示例与示例十仅有的区别在于切割机构1不同,而张力机构2、收放线机构3的结构及布局均与示例十相同。
[0161]
图24为本技术实施例提供的线锯单元的第十一种布局示意图。如图24所示,切割机构1包括三个切割主辊11构成三角形,其中两个切割主辊11在上,一个切割主辊11在下。切割线从上方两个切割主辊11的顶部绕进或绕出切割机构1。上方两个切割主辊11之间的
切割线用于对从上向下移动的硅棒进行切割。
[0162]
以图24展示的方案为例,一种绕线方向为:切割线7从左边的收放线辊 31绕出后,向左上方倾斜绕过张力轮21,然后向右上方延伸,从上方左边切割主辊11的顶部绕进切割机构,沿顺时针方向缠绕在三个切割主辊11上,再从上方右边切割主辊11的顶部绕出切割机构,向右下方延伸绕设于右边的张力轮21,再向内储存于对应的收放线辊31。在切片机运行过程中,切割线沿相同的路径往复移动,即:正向移动时与上述绕线方向相同,反向移动时与上述绕线方向相反。
[0163]
示例十二
[0164]
本示例与示例十仅有的区别在于切割机构1的进出线位置不同,而张力机构2、收放线机构3的结构及布局均与示例十相同。
[0165]
图25为本技术实施例提供的线锯单元的第十二种布局示意图。如图25所示,切割机构1包括两个水平布置的切割主辊11,切割线7从切割主辊11底部绕进或绕出。硅棒从上向下移动,两个切割主辊11顶部之间的切割线对硅棒进行切割。
[0166]
以图25展示的方案为例,一种绕线方向为:切割线7从左边的收放线辊 31绕出后,向左上方倾斜绕过张力轮21,然后向右上方延伸,从右边切割主辊11的底部绕进切割机构,沿逆时针方向缠绕在两个切割主辊11上,再从左边切割主辊11的底部绕出切割机构,向右下方延伸绕设于右边的张力轮21,再向内储存于对应的收放线辊31。在切片机运行过程中,切割线沿相同的路径往复移动,即:正向移动时与上述绕线方向相同,反向移动时与上述绕线方向相反。
[0167]
对上述方案,本示例提供另一种绕线方式:图26为本技术实施例提供的线锯单元的第十二种布局的另一绕线示意图。如图26所示,切割线7从左边的收放线辊31绕出后,向由上方倾斜绕过右边的张力轮21,然后向左上方延伸,从左边切割主辊11的底部绕进切割机构,沿顺时针方向缠绕在两个切割主辊11上,再从右边切割主辊11的底部绕出切割机构,向左下方延伸绕设于左边的张力轮21,再向右下方延伸,储存于右边的收放线辊31。
[0168]
示例十三
[0169]
本示例与示例十二仅有的区别在于切割机构1不同,而张力机构2、收放线机构3的结构及布局均与示例十二相同。
[0170]
图27为本技术实施例提供的线锯单元的第十三种布局示意图。如图27所示,切割机构1包括三个切割主辊11构成三角形,其中两个切割主辊11在上,一个切割主辊11在下。切割线从下方切割主辊11的底部绕进或绕出切割机构 1。上方两个切割主辊11之间的切割线用于对从上向下移动的硅棒进行切割。
[0171]
以图27展示的方案为例,一种绕线方向为:切割线7从左边的收放线辊 31绕出后,向左上方倾斜绕过张力轮21,然后向右上方延伸,从下方切割主辊11的底部绕进切割机构,沿逆时针方向缠绕在三个切割主辊11上,再从下方切割主辊11的底部绕出切割机构,向右下方延伸绕设于右边的张力轮21,再向内储存于对应的收放线辊31。在切片机运行过程中,切割线沿相同的路径往复移动,即:正向移动时与上述绕线方向相同,反向移动时与上述绕线方向相反。
[0172]
对上述方案,本示例提供另一种绕线方式:图28为本技术实施例提供的线锯单元的第十三种布局的另一绕线示意图。如图28所示,切割线7从左边的收放线辊31绕出后,向
由上方倾斜绕过右边的张力轮21,然后向左上方延伸,从下方切割主辊11的底部绕进切割机构,沿顺时针方向缠绕在三个切割主辊11上,再从下方切割主辊11的底部绕出切割机构,向左下方延伸绕设于左边的张力轮21,再向右下方延伸,储存于右边的收放线辊31。
[0173]
上述示例十、十一、十二、十三所提供的方案,张力机构与收放线机构的位置可以灵活调整,以适应切片机的结构布局。且切割线从切割主辊的底部走线,避免在切割室门上进行开口穿线,其实现过程更为简单,也不对切割室门的开关造成影响。
[0174]
基于上述方案,本实施例还提供一种线切割机,包括上述任一内容所提供的线锯单元。该线切割机具有与上述线锯单元相同的技术效果。
[0175]
具体的,线锯单元设置于切割框架上。切割框架从上至下设置有切割区和收放线区,切割机构设置于切割区内。切割区的两侧分别设有收放线区,收放线机构设置于收放线区内。
[0176]
上述线切割机具体为切片机,图1和图2所示的切片机对应图3和图27 方案,对于其他方案切片机的结构布局可进行相应的调整。切割框架1的上部设有可容纳切割机构1的容纳空间,形成切割区。切割框架1的下部两侧分别设有用于容纳收放线机构3的收放线区。
[0177]
对于图27所示的方案,可以在切割框架1的侧面开设切割线过孔,从切割机构1绕出的切割线7穿过切割线过孔后,绕设于张力轮21;从张力轮21 绕出的切割线穿过切割线过孔后,绕设于切割机构1。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1