一种可停放多台飞机的自动停机库的制作方法
1.本实用新型涉及停机库技术领域,具体为一种可停放多台飞机的自动停机库。
背景技术:
2.停机库是指用于飞机停飞放置的平台,通常是用于中小型无人机的放置。
3.无人机在由控制计算机完全的或间歇地自主地操作后,需要飞回停机库,进行充电或检修,保证下次的正常飞行和使用。
4.需要现有的飞机停机库通常一层只能停放一个无人机,若建设多个停机库,停机库之间的整体性较差,使得无人机的停放较为杂乱,同时当需要对停机库进行移动携带时,其无法很好地进行配合使用,无法在户外进行便利地使用,所以我们提出一种可停放多台飞机的自动停机库。
技术实现要素:
5.针对现有技术的不足,本实用新型公开了一种可停放多台飞机的自动停机库,以解决上述背景技术中提出停机库之间的整体性较差,使得无人机的停放较为杂乱,同时当需要对停机库进行移动携带时,其无法很好地进行配合使用,无法在户外进行便利地使用的问题。
6.本实用新型通过以下技术方案来实现上述目的,一种可停放多台飞机的自动停机库,包括:
7.底座,所述底座的上表面设置有连接座;
8.多个遮挡门,所述遮挡门转动连接在连接座的内壁上;
9.多个放置座,所述放置座设置在底座的内部;
10.其特征在于:所述底座的内部设置有多个调节组件,调节组件包括固定座、调节座和丝杆,所述固定座设置在底座的内壁上,所述调节座滑动连接在固定座的内壁上;
11.所述固定座的上表面设置有升降组件,升降组件包括支撑座、两个第一支撑杆和两个第二支撑杆。
12.优选的,所述放置座处于遮挡门的正下方,所述放置座的上表面设置有推动座。
13.优选的,所述丝杆转动连接在固定座的内壁上,处于同一垂直面的多个丝杆相连接,且处于边缘的一个丝杆贯穿底座向外延伸,向外延伸的一端与外接驱动组件相连接。
14.优选的,所述调节座螺纹连接在丝杆的外表面,所述调节座的上表面与两个第一支撑杆的一端转动连接。
15.优选的,所述第一支撑杆的另一端与支撑座的内壁转动连接,所述第二支撑杆与固定座的上表面转动连接,所述第二支撑杆与对应的第一支撑杆转动连接。
16.优选的,所述第二支撑杆的另一端转动连接有滑动块,滑动块滑动连接在支撑座的内壁上,所述支撑座与固定座之间连接有两个伸缩杆。
17.本实用新型公开了一种可停放多台飞机的自动停机库,其具备的有益效果如下:
18.1、该可停放多台飞机的自动停机库,通过升降组件,使得支撑座进行移动,使得放置座处于遮挡门的外界,此时处于同一垂直面的放置座处于连接座的外界,从而便于无人机停落在放置座的上表面,当停放完成后,进行上述相反运动,使得放置座滑动进入底座的内部,便于无人机的保护。
19.2、该可停放多台飞机的自动停机库,放置座的数量能够根据使用需要进行设置不同的数量,由于多个放置座在底座的作用下,连接在一起,从而使得放置座的整体性较好,当需要在外界使用停机库时,直接将底座进行运输移动到指定位置即可,不需要多个停机库进行配合使用。
附图说明
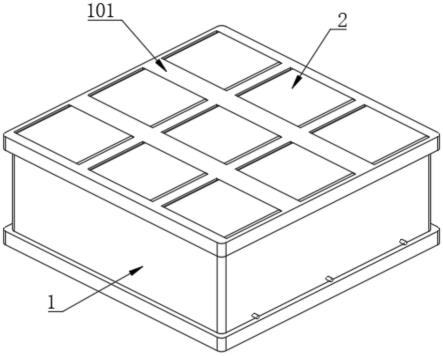
20.图1为本实用新型结构示意图;
21.图2为本实用新型剖视图;
22.图3为本实用新型固定座结构示意图;
23.图4为本实用新型支撑座结构示意图;
24.图5为本实用新型图4中a的放大图。
25.图中:1、底座;101、连接座;2、遮挡门;3、放置座;301、推动座;4、固定座;401、调节座;402、丝杆;5、支撑座;501、第一支撑杆;502、第二支撑杆;503、伸缩杆。
具体实施方式
26.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
27.本实用新型实施例公开一种可停放多台飞机的自动停机库。
28.根据附图1-3所示,包括底座1、多个遮挡门2和多个放置座3,底座1的上表面设置有连接座101,遮挡门2转动连接在连接座101的内壁上;
29.放置座3设置在底座1的内部,放置座3处于遮挡门2的正下方,放置座3的上表面设置有推动座301;
30.当需要进行无人机进行停放时,首先通过外接驱动组件,在调节组件的作用下,使得升降组件进行传动;
31.通过升降组件,使得支撑座5进行移动,使得支撑座5上表面的放置座3和推动座301进行移动,在推动座301的移动下,使得推动座301与遮挡门2接触并挤压,使得遮挡门2进行转动,直至使得放置座3处于遮挡门2的外界;
32.此时处于同一垂直面的放置座3处于连接座101的外界,从而便于无人机停落在放置座3的上表面,当停放完成后,进行上述相反运动,使得放置座3滑动进入底座1的内部,便于无人机的保护;
33.同时放置座3的数量能够根据使用需要进行设置不同的数量,由于多个放置座3在底座1的作用下,连接在一起,从而使得放置座3的整体性较好,当需要在外界使用停机库时,直接将底座1进行运输移动到指定位置即可,不需要多个停机库进行配合使用。
34.根据附图1-4所示,底座1的内部设置有多个调节组件,调节组件包括固定座4、调节座401和丝杆402,固定座4设置在底座1的内壁上;
35.调节座401滑动连接在固定座4的内壁上,丝杆402转动连接在固定座4的内壁上,处于同一垂直面的多个丝杆402相连接;
36.且处于边缘的一个丝杆402贯穿底座1向外延伸,向外延伸的一端与外接驱动组件相连接,调节座401螺纹连接在丝杆402的外表面;
37.使得与之连接的丝杆402进行转动,由于多个丝杆402之间固定连接,从而使得相连接的多个丝杆402进行转动;
38.在丝杆402的转动下,使得调节座401沿着丝杆402的外表面进行移动,此时在丝杆402的移动下,使得丝杆402上表面转动连接的两个第一支撑杆501随之进行移动并进行转动。
39.根据附图4和图5所示,固定座4的上表面设置有升降组件,升降组件包括支撑座5、两个第一支撑杆501和两个第二支撑杆502;
40.调节座401的上表面与两个第一支撑杆501的一端转动连接,第一支撑杆501的另一端与支撑座5的内壁转动连接,第二支撑杆502与固定座4的上表面转动连接;
41.第二支撑杆502与对应的第一支撑杆501转动连接,第二支撑杆502的另一端转动连接有滑动块,滑动块滑动连接在支撑座5的内壁上,支撑座5与固定座4之间连接有两个伸缩杆503;
42.在调节组件的作用下,使得两个第一支撑杆501进行移动并转动,使得第二支撑杆502随之进行转动,同时第二支撑杆502转动使得滑动块进行滑动;
43.此时在第一支撑杆501和第二支撑杆502的转动下,使得支撑座5相对于固定座4进行移动,同时伸缩杆503进行伸缩,在伸缩杆503对支撑座5进行支撑,使得支撑座5的移动更为稳定;
44.当支撑座5进行移动,使得放置座3和推动座301进行移动,直至使得放置座3处于遮挡门2的外界,从而便于无人机停落在放置座3的上表面,当停放完成后,进行上述相反运动,使得放置座3滑动进入底座1的内部,便于无人机的保护。
45.工作原理:当需要进行无人机进行停放时,首先通过外接驱动组件,使得与之连接的丝杆402进行转动,由于多个丝杆402之间固定连接,从而使得相连接的多个丝杆402进行转动;
46.在丝杆402的转动下,使得调节座401沿着丝杆402的外表面进行移动,此时在丝杆402的移动下,使得丝杆402上表面转动连接的两个第一支撑杆501随之进行移动并进行转动;
47.在第一支撑杆501的移动和转动下,使得与第一支撑杆501转动连接的第二支撑杆502随之进行转动,同时第二支撑杆502转动使得与之转动连接的滑动块沿着支撑座5内壁进行滑动,从而使得第一支撑杆501和第二支撑杆502的转动路径被限定;
48.此时在第一支撑杆501和第二支撑杆502的转动下,使得支撑座5相对于固定座4进行移动,同时伸缩杆503进行伸缩,在伸缩杆503对支撑座5进行支撑,使得支撑座5的移动更为稳定;
49.当支撑座5进行移动,使得支撑座5上表面固定连接的放置座3和推动座301进行移
动,在推动座301的移动下,使得推动座301与遮挡门2接触并挤压,使得遮挡门2进行转动,直至使得放置座3处于遮挡门2的外界;
50.此时处于同一垂直面的放置座3处于连接座101的外界,从而便于无人机停落在放置座3的上表面,当停放完成后,进行上述相反运动,使得放置座3滑动进入底座1的内部,便于无人机的保护;
51.同时放置座3的数量能够根据使用需要进行设置不同的数量,由于多个放置座3在底座1的作用下,连接在一起,从而使得放置座3的整体性较好,当需要在外界使用停机库时,直接将底座1进行运输移动到指定位置即可,不需要多个停机库进行配合使用。
52.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1