大区域高平整度要求激光抹平机器人及抹平方法与流程
本发明涉及建筑机器人,尤其涉及一种大区域高平整度要求激光抹平机器人。
背景技术:
1、在某些大面积的场合,如果要求地面高平整度,在浇筑混凝土之后,激光抹平机器人是一种有效的选择,该机器人主要通过激光测量实现高精度、高效率的抹平操作,可用于空内和空外场合。
2、如在中国专利申请号cn110528839a中,提供了一种抹平机器人,刮板组件可以向下运动以与基体表面接触,在抹平机器人行走的过程中,通过刮板组件下方的锯齿状的底部,可以使得基体表面较为松散,从而可以有利于抹平机器人对基体表面进行抹平作业,同时,刮板组件还可以对基体表面在一定程度上进行清扫,从而可以防止基体表面上具有的一些杂质而影响抹平机器人的抹平作业的效果。
3、又如在中国专利申请号cn110924686a中,提供了一种抹平机器人,通过第一升降件可以控制振捣板上下升降,根据施工面具体情况,实时调节振捣板与施工面的距离,使振捣板适应不同高度的施工面,进行有效的振捣提浆,振捣板接触混凝土施工面后,振捣板上形成有激振力,可实时对混凝土表面进行振动,从而使得混凝土砂浆密度大的向混凝土下层沉积,密度小向上层浮动,经过振捣过的混凝土表面行成一层粘稠装浮浆,实现自动提浆功能。
4、但是此种类型的抹平机器人在使用过程中,当刮板组件将混凝土抹平后,由于刮板会与混凝土接触,导致部分混凝土粘附在刮板表面,当混凝土变硬后,会导致刮板在下次使用时,其表面不在变得光滑,从而会影响基体抹平的平整度,为此,我们提出了一种大区域高平整度要求激光抹平机器人。
技术实现思路
1、本发明的目的是为了解决现有技术中,当刮板组件将混凝土抹平后,由于刮板会与混凝土接触,导致部分混凝土粘附在刮板表面,当混凝土变硬后,会导致刮板在下次使用时,其表面不在变得光滑,从而会影响基体抹平的平整度的问题,而提出的一种大区域高平整度要求激光抹平机器人。
2、为了实现上述目的,本发明采用了如下技术方案:
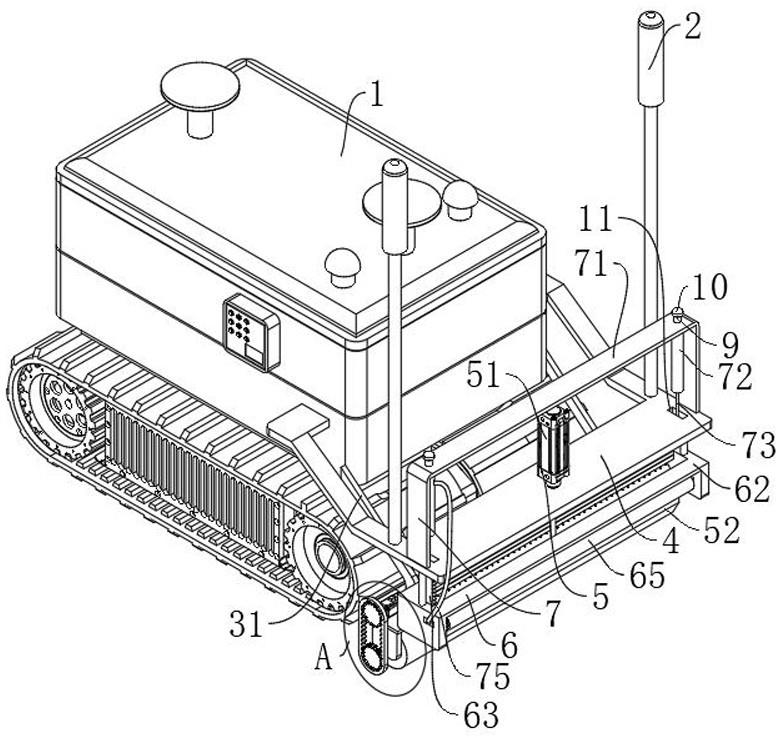
3、一种大区域高平整度要求激光抹平机器人,包括抹平机器人本体,所述抹平机器人本体的顶部设置有激光接受器,还包括:
4、第一抹平机构,所述第一抹平机构设置在抹平机器人本体的前侧面用于初步将混凝土抹平;
5、支撑架,所述支撑架位于抹平机器人本体的前侧面;
6、第二抹平机构,所述第二抹平机构安装在支撑架的顶部用于二次将混凝土抹平;
7、刮除机构,所述刮除机构设置在第二抹平机构的底部;
8、其中,当所述第二抹平机构经过刮除机构时,可以同步将第二抹平机构表面的混凝土去除;
9、喷液机构,所述喷液机构设置在支撑架的顶部,当所述第二抹平机构升降时,可以同步将喷液机构内的流平剂喷射到第二抹平机构表面用于流平混凝土;
10、摆动机构,所述摆动机构安装在喷液机构内用于提高喷液机构的喷射范围。
11、优选的,所述第一抹平机构包括:
12、连接条,所述连接条连接在抹平机器人本体的前侧面;
13、安装架,所述安装架连接在连接条的底端;
14、伺服电机,所述伺服电机安装在安装架的顶部;
15、圆形齿轮一,所述圆形齿轮一连接在伺服电机的输出轴端;
16、滚筒,所述滚筒通过轴承与安装架的底部转动相连;
17、圆形齿轮二,所述圆形齿轮二连接在滚筒的左端;
18、其中,所述圆形齿轮一与圆形齿轮二之间通过齿轮皮带传动连接。
19、震动电机,所述震动电机设置在安装架的顶部。
20、优选的,所述第二抹平机构包括:
21、气缸,所述气缸安装在支撑架的顶部;
22、抹平板,所述抹平板连接在气缸的输出端用于将混凝土抹平。
23、优选的,所述刮除机构包括:
24、连接杆,所述连接杆连接在支撑架的底部;
25、安装壳,所述安装壳连接在支撑架的底端;
26、齿条,所述齿条固定在抹平板的侧面;
27、连接齿轮,所述连接齿轮啮合在齿条的两侧面;
28、刮土辊,所述刮土辊固定在连接齿轮的轴心处用于将抹平板表面的混凝土刮除。
29、优选的,所述喷液机构包括:
30、u型架,所述u型架固定在支撑架的顶部;
31、固定筒,所述固定筒连接在u型架的底部;
32、升降杆,所述升降杆固定在齿条的顶部;
33、活塞,所述活塞连接在升降杆的顶端且活塞运动在固定筒内;
34、进气软管,所述进气软管的一端与固定筒连通,所述进气软管的另一端与连通有通气壳,所述通气壳固定在支撑架的底部;
35、喷嘴,所述喷嘴设置在通气壳内。
36、优选的,所述摆动机构包括:
37、圆形孔,所述圆形孔开设在通气壳的一侧面;
38、气囊,所述气囊固定在圆形孔内;
39、其中,所述喷嘴固定在气囊的轴心处。
40、优选的,所述固定筒的顶端连通有进液管,所述进液管内螺纹连接有密封塞。
41、优选的,所述支撑架的顶部开设有矩形口,所述齿条滑动在矩形口内。
42、优选的,所述刮土辊为弹性垫。
43、优选的,所述喷嘴倾斜设置用于确保流平剂能够滴落到抹平板的表面。
44、优选的,所述活塞的外表面设置有弹性件,且弹性件与固定筒的内壁紧密贴合用于防止流平剂渗漏。
45、一种大区域高平整度要求激光抹平机器人的使用方法,具体步骤如下:
46、步骤a:将抹平机器人本体通过预定路线移动至浇筑混凝土的施工工地上,在抹平时,启动气缸,气缸驱动抹平板向下移动,直至抹平板移动至与混凝土相接触,通过控制器控制抹平机器人本体往后移动,同时启动伺服电机,驱动圆形齿轮一旋转,通过齿轮皮带的连接,使圆形齿轮一带动圆形齿轮二转动,圆形齿轮二带动滚筒在混凝土表面转动,初步将混凝抹平,并且通过滚筒的转动,将之前抹平机器人本体移动的轨迹去除,启动震动电机,通过震动电机产生的震动,使滚筒能够更好的与混凝土接触,通过抹平板与混凝土表面相接触,并且抹平机器人本体的移动带动抹平板移动,从而再次将混凝土抹平,在将大区域混凝土抹平之后,通过气缸驱动抹平板向上移动,抹平板移动带动齿条向上移动,从而带动连接齿轮和刮土辊转动,将沾附在抹平板表面的混凝土刮除;
47、步骤b:通过进液管倒入流平剂(流化剂),并通过密封塞将进液管密封,当气缸驱动抹平板和齿条向上移动时,也会带动升降杆向上移动,升降杆会带动活塞在固定筒内运动,将固定筒内的流平剂进行挤压,将流平剂从进气软管挤入通气壳内,并从u型架喷射到抹平板表面,初步将硬质的混凝土流平,在经过刮土辊的刮除;
48、步骤c:当流平剂进入到安装壳内时,通过其流动的动力可以带动喷嘴适当的摆动,使流平剂与抹平板表面的混凝土接触的更加充分。
49、与现有技术相比,本发明提供了一种大区域高平整度要求激光抹平机器人,具备以下有益效果:
50、1、该大区域高平整度要求激光抹平机器人,通过刮除机构的设置,当第二抹平机构在将混凝土抹平之后,利用其升降的动力可以同步带动刮除机构运转,使第二抹平机构在经过刮除机构时,可以及时将粘附在第二抹平机构表面的混凝土刮除,避免第二抹平机构表面的混凝土变硬之后,导致第二抹平机构在下次使用时,其表面不在变得光滑,从而影响基体抹平的平整度。
51、2、该大区域高平整度要求激光抹平机器人,通过喷液机构的设置,利用第二抹平机构升降的动力,还可以同步将喷液机构内的流平剂喷射到抹平板的表面,使混凝土流平之后在进行去除,提升混凝土的去除效果。
52、3、该大区域高平整度要求激光抹平机器人,通过摆动机构的设置,利用进入流平剂(流化剂)的动力,使气囊可以适当的摆动,从而使喷嘴跟随一起摆动,增强喷嘴喷射范围,使流平剂与抹平板表面的混凝土接触的更加充分,进一步提升其去除效果。
- 还没有人留言评论。精彩留言会获得点赞!