一种智能停车机器人、自动化停车系统及方法
本发明涉及汽车领域,尤其涉及一种智能停车机器人、自动化停车系统及方法。
背景技术:
1、随着科技的发展,自动化的应用场景越来越来越广泛,同时伴随汽车产业保有量的越来越大,停车难问题也越来越突出。其中智能化车库是缓解停车难问题的途径之一,而智能化车库的关键技术包括自动化停车。现有常见的自动化停车技术通常由车辆自带的智能驾驶系统完成,但自动驾驶技术无法做到普及,且不同系统之间存在差异性,自动停车难以做到标准化和通用化。
2、自动导向车技术,简称agv,是一种采用自动或人工方式装载货物,按设定的路线自动行驶或牵引着载货台车至指定地点,再用自动或人工方式装卸货物的工业车辆。将自动导向车技术应用于停车库可以有效解决智能化车库的自动化停车问题。
3、自动导向车技术的应用场景广泛,例如智能化车间、物流分拣、智能化码头等,但如何与汽车配合,适应自动停车应用场景,需要对现有的自动导向车进行重新设计。例如,如何与汽车配合,对汽车高效可靠的进行装卸操作,是需要首先解决的问题。
技术实现思路
1、本发明要解决的技术问题是提供一种智能停车机器人、自动化停车系统及方法,可以实现汽车的整车转运,具有车辆搬运可靠、自动化程度高的优点。
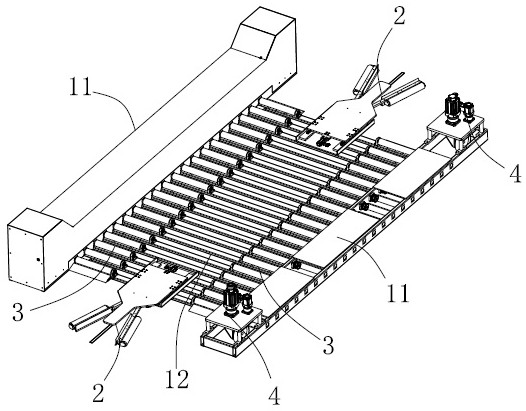
2、为了解决上述技术问题,本发明提供的技术方案如下:一种智能停车机器人,包括车体,所述的车体上设有车辆停放平台和行走组件,所述的车辆停放平台上设有主动传送组件,所述的行走组件用于驱动车体运动;
3、还包括轮胎推送组件,所述的轮胎推送组件位于车辆停放平台端部;所述的轮胎推送组件包括固定安装座、活动安装座和推送驱动机构,所述的固定安装座与车体连接,所述的推送驱动机构用于驱动活动安装座相对于固定安装座往复运动,所述活动安装座的运动方向平行于主动传送组件的传送方向;
4、所述的轮胎推送组件还包括轮胎挡位机构,所述的轮胎挡位机构包括轮胎挡臂和挡位驱动单元,所述的轮胎挡臂与活动安装座连接;所述的轮胎挡臂相对于活动安装座至少具有回收状态和扩张状态:扩张状态下,轮胎挡臂向活动安装座两侧伸出,回收状态下,轮胎挡臂回收,活动安装座两侧留出轮胎通过区间;所述的挡位驱动单元用于驱动轮胎挡臂在回收状态和扩张状态之间切换。
5、在进行停车操作时,首先智能停车机器人运动至待停汽车的适当方位,其中以轮胎推送组件与待停汽车的车头或车尾相对设置为准。轮胎推送组件工作,活动安装座向待停汽车底盘下方运动,轮胎挡臂以回收状态进给,进给至特定距离后由回收状态切换至扩张状态,轮胎挡臂运动至待停汽车的对应轮胎后侧,实现轮胎挡臂与汽车轮胎之间的相对格挡限位。
6、随后,轮胎推动组件工作驱动活动安装座反向运动,在轮胎挡臂的限位下,待停汽车与车体之间相对运动。至对应的汽车轮胎运动至车辆停放平台上后,轮胎挡臂复位至回收状态,并由主动传送组件继续驱动待停汽车相对于车体运动,直至待停汽车完全进入车辆停放平台上。
7、装车完成后,智能停车机器人自主行走,同时带动待停汽车转位至待停位置。最后通过主动传动组件的驱动即可将待停汽车从车辆停放平台卸下至特定位置。
8、本技术的智能停车机器人,通过夹持轮胎并拖行的方式,并在主动传送组件的配合下,可以实现待停汽车相对于车体的运动,通过智能停车机器人整体自主移动的方式实现汽车的转运,从而完成停车操作。具有车辆搬运可靠、自动化程度高的优点。
9、作为优选,所述的车体包括车架和两个承载架,两个所处的承载架平行设置,所述的车架位于两个承载架之间;所述的车辆停放平台设置在车架上,每一所述的承载架上至少设有一组行走组件。
10、车架用于停放待停汽车,承载架用于设置行走组件等功能部件,并实现整体承载。由于功能部件集中设置在承载架上,车架的高度可以设置的相对较低,以更好的与汽车底盘适配。
11、作为优选,还包括行走转向组件,所述的行走转向组件包括转向驱动机构,所述的转向驱动机构用于驱动行走组件相对于车体转向运动。
12、作为优选,所述的行走组件包括行走轮、行走驱动机构和刹车机构,所述的行走驱动机构用于驱动行走轮转动;
13、所述的刹车机构包括刹车压紧件和刹车驱动单元,所述的刹车压紧件位于行走轮上方,所述刹车驱动单元用于驱动刹车压紧件上下运动。
14、刹车机构可以对行走轮进行制动,在特定位置和状态下,保持智能停车机器人的状态稳定。
15、作为优选,所述的主动传送组件包括若干沿传送方向分布的滚筒、及驱动滚筒转动的传送驱动件。
16、作为优选,所述的传送驱动件包括中间传动单元和动力单元,每相邻两根滚筒之间通过中间传动件连接,所述的动力单元驱动至少其中一根滚筒转动。
17、作为优选,所述的轮胎挡臂与活动安装座旋转活动连接,所述的挡位驱动单元驱动轮胎挡臂转动;
18、所述的轮胎推送组件还包括锁止机构,所述的锁止机构包括锁止块和锁止驱动单元,所述的锁止块活动设置;所述的轮胎挡臂上固定设置有挡轮,所述的锁止驱动机构用于驱动锁止块相对于挡轮运动。
19、在装车过程中,轮胎挡臂对待停汽车的轮胎进行限位,并在待停汽车相对于车体运动的过程中承载,而由于轮胎挡臂活动设置,为了保证装车过程的顺利进行,设置锁止机构对轮胎挡臂的姿态进行限制。当锁止块与挡轮配合,可以阻止挡轮继续转动,从而保持轮胎挡臂的状态,实现轮胎挡臂的承载和推动轮胎运动。
20、作为优选,所述的挡轮上设有被动齿;所述的挡位驱动单元包括齿条和挡位驱动件,所示的齿条与被动齿啮合,所述的挡位驱动件用于驱动齿条运动;
21、所述锁止块面向从动轮的一侧设有锁止齿,所述的锁止齿与被动齿匹配。
22、一种自动化停车系统,包括停车库、控制模块、及如上所述的智能停车机器人,其中的停车库包括驻车区和库区;所述的控制模块包括车辆定位单元、姿态采集单元和处理器;
23、所述的车辆定位单元用于获取待停汽车在驻车区内的位置和姿态信息,并发送给处理器;
24、所述的姿态采集单元用于在预设范围内采集智能停车机器人与待停汽车之间的相对位置信息,并发送给处理器;
25、处理器用于接受车辆定位单元发送的位置和姿态信息,生成初始取车位置,并形成运动指令发送给智能停车机器人;用于接收姿态采集单元发送的相对位置信息,并生成姿态调整指令发送给智能停车机器人;
26、处理器还用于生成取车指令、转位指令和卸车指令发送给智能停车机器人;
27、智能停车机器人用于接收处理器发送的指令,并进行姿态调整、取车、转位和卸车操作。
28、本技术的自动化停车系统可以自动化完成车辆定位、装车、转位和卸车操作,具有系统可靠、自动化程度高的优点。
29、一种自动化停车方法,采用如上所述的自动化停车系统;
30、至少包括以下步骤:
31、s1.定位:车辆定位单元工作,获取待停汽车位置信息,处理器根据待停汽车位置信息控制智能停车机器人运动至初始取车位置;
32、s2.装车:姿态采集单元工作,获取智能停车机器人与待停汽车之间的相对位置信息;处理器根据智能停车机器人与待停汽车之间的相对位置信息,控制智能停车机器人精确调整与待停汽车的相对位置;智能停车机器人工作将待停汽车装载至车辆停放平台;
33、s3.转位:智能停车机器人工作,将待停汽车转位至库区;
34、s4.卸车:智能停车机器人工作,将待停汽车卸下。
- 还没有人留言评论。精彩留言会获得点赞!