扫抹机器人的制作方法
1.本发明所涉及的扫地和抹地及监控一体的扫抹机器人,属于清洁技术领域。
背景技术:
2.目前,大型共建、写字楼、商场、地铁站地面清洁都是采用人工先扫地面的灰尘,然后在使用加宽拖布进行拖抹,在湿抹一定的面积后,需要用水清洗拖布,再装到拖布扳上继续拖抹,不断往返重复。其状况是保洁人员多,劳动强度大,人工费高,效率低。
3.同时,扫抹机器人也进入了家庭,目前,扫抹机器人在扫地的同时用一块不更换的抹布进行淋水对地面湿抹。这样,只能湿抹一定的地面,如果拖抹面积大了就抹不干净,还出现二次污染,功能上也还有很多的不足,仍没有解决现有技术中所存在的问题。
技术实现要素:
4.本发明的目的是针对目前室内清洁效率低下的状况,研究设计了能对地面进行扫地和拖抹及监控一体的扫抹机器人,和能对扫抹机器人进行充电及清洗抹布的扫抹机器人基站。并且,在抹地的过程中抹布不断进行前移换新,拖抹部分超出壳体宽度,不受壳体的限制和阻碍对地面的边角进行拖抹,不留死角的清洁。扫抹机器人在拖抹完成后能自动回到扫抹机器人基站进行充电及清洗抹布。可减少人力成本,降低劳动强度,提高清洁度。从而解决现有的清洁技术中所存在的问题。
5.本发明的技术解决方案是这样实现的:
6.本发明所述的扫抹机器人,包括壳体、浸水传感器、红外线传感器、摄像头,吸尘装置安装在壳体底盘前部,电池安装在壳体里,充电插座安装在壳体的后端,在壳体底盘前端装有导向轮后部两侧装有两个后轮,其特征在于:在所述的壳体的前端分别装有浸水传感器和红外线传感器;在壳体前端装有第一和第二升降装置;在第一和第二升降装置上装有第一和第二电机;在第一和第二电机的轴上分别装有边刷;在吸尘装置后面镜像装有第一和第二堆布盒;堆布盒内壁分别装有活动夹具;在堆布盒内上角分别装有带拨动板的电动拨动筒;在堆布盒外上角豁口处分别装有带塑胶柱的电动柱滚筒;堆布盒底分别装有活动底板;在第一和第二堆布盒中间装有压板升降装置和监控升降装置;摄像头安装在监控升降装置上;在压板升降装置下装有超过壳体宽度的两侧带有滚筒的宽滚压板;超过壳体宽度的长条布一端安装在第一堆布盒内另一端绕过宽滚压板安装在第二堆布盒内;壳体的空隙处设有注水盒。
7.本发明所述的扫抹机器人,包括壳体、浸水传感器、红外线传感器、摄像头,吸尘装置安装在壳体底盘前部,电池安装在壳体里,充电插座安装在壳体的后端,在壳体底盘前端装有导向轮后部两侧装有两个后轮,其特征在于:在所述的壳体的前端分别装有浸水传感器和红外线传感器;在壳体前端装有第一和第二升降装置;在第一和第二升降装置上装有第一和第二电机;在第一和第二电机的轴上分别装有边刷;在吸尘装置后面镜像装有第一和第二堆布盒;堆布盒内壁分别装有活动夹具;在堆布盒内上角分别装有带拨动板的电动
拨动筒;在堆布盒外上角豁口处分别装有带塑胶柱的电动柱滚筒;堆布盒底分别装有活动底板;在第一和第二堆布盒中间装有压板升降装置和监控升降装置;摄像头安装在监控升降装置上;在压板升降装置下装有超过壳体宽度的两侧带有滚筒的宽滚压板;超过壳体宽度的长条布一端安装在第一堆布盒内另一端绕过宽滚压板安装在第二堆布盒内;在第二堆布盒后面装有第六升降装置;第六升降装置下装有超过壳体宽度的宽压板;布块活动安装宽压板上;壳体的空隙处设有注水盒。
8.本发明所述的扫抹机器人基站,包括基壳、充电插头、电磁阀、风机,其特征在于:所述的基壳上面设有通气孔;基壳前面下部设有敞口的充电仓和连接地面的坡道;所述的充电仓的后壁板上设有充电插头;充电仓的底板开有长条口;长条口上装有两个活动插板;两个活动插板背面分别装有第一和第二齿条;在第一和第二齿条下装分别有第四和第五电机;第四和第五电机的轴上分别装有第一和第二齿轮与第一和第二齿条咬合;在长条口下装有水盒;水盒下装有超声波的声波器;水盒上装有进水管和第一出水管;进水管上装有第一电磁阀;第一出水管上装有第二电磁阀;在所述的基壳里装有风机;在风机的吸风口装有风道;风道下端装有第二出水管并与第一出水管相通;第二出水管装有第三电磁阀;在风道前端口上装有套管;套管上面设有气孔下面装有第三齿条;第三齿条下装有第六电机;在第六电机轴上装有第三齿轮与套管下的第三齿条咬合;套管在充电仓底板和水盒之间的空挡伸缩活动。
9.本发明所述的扫抹机器人,其特征在于:所述的升降装置,包括升降电机、丝杠、杠筒和缸套,在升降电机轴上装有丝杠;在丝杠上装有外圆带有凸长条形的杠筒;在杠筒外装有内圆带有凹长条形的缸套。
10.本发明所述的扫抹机器人,其特征在于:所述的压板升降装置是一个升降装置安装在壳体的中心线上。
11.本发明所述的扫抹机器人,其特征在于:所述的压板升降装置是二个升降装置并列安装在壳体上。
12.本发明所述的扫抹机器人,其特征在于:所述的监控升降装置是一个升降装置倒置按装在壳体的底盘上;在升降装置上装有第三电机;在第三电机的轴上装有监控架;在监控架上装有电动轴;摄像头安装在电动轴上;所述的监控升降装置安装在压板升降装置的一侧。
13.本发明所述的扫抹机器人,其特征在于:所述的监控升降装置安装在压板升降装置的两个升降装置的中间并在壳体的中心线上。
14.本发明在使用时,首先,安装在壳体上的两个升降装置使边刷在扫地时降下,清扫地面。同时,超宽的长条布通过第一堆布盒和第二堆布盒外上角豁口处的两个电动柱滚筒的转动,在电动柱滚筒上带有塑胶柱的拨的作用下,绕在两个电动柱滚筒上的超宽的长条布及边缘就被卷曲或放开,一卷一放的从第一和第二堆布盒进入或出来向前移动,已经脏的那一部分长条布顺着角豁口处被收到第一堆布盒里并被内上角装有电动拨动筒的拨动板拨到第一堆布盒底下。同时,压板升降装置的升降电机就转动带动宽滚压板降下再次把一段干净的长条布压在地面上继续拖抹地面。当一段长条布再次变脏了的时候,压板升降装置的升降电机就转动抬起或降下宽滚压板,长条布就再次卷起、前移、压触拖抹地面。如此往复运作,扫抹机器人就一直用一段干净的长条布接触拖抹地面,把地面擦干净,而没有
二次污染地面。
15.所述的扫抹机器人在对地面清洁以后,可以自动回到扫抹机器人基站进行充电和清洗长条布。扫抹地机器人的第一个堆布盒外上角豁口处的电动柱滚筒把已经脏的长条布卷放到充电仓底板的水盒里,超声波的声波器开始工作,长条布上的灰尘和污物在水中被超声波震荡下来,长条布就被清洗干净了。这时,基壳里的风机开始转动,风道前端口上的套管伸出插到长条布下,长条布里的水分就通过套管上的通气孔吸到套管里经风道上的第二排水管流入到下水道里。清洗干净的长条布就被第二堆布盒外上角豁口处的电动柱滚筒卷入到第二个堆布盒里,全部卷入后,扫抹机器人就可以进行下一次拖抹。
16.本发明的优点是显而易见的,主要表现在:
17.本发明所述的扫抹机器人,首先,通过壳体上的两个边刷把地面上的灰尘清扫干净。同时,设置在后面的超过壳体宽度的长条布在抹地的过程中不断进行前移换新,进行大面积的拖抹。由于宽滚压板和超宽长条布超过壳体宽度,在拖抹墙角或家具下的地面时,壳体不与墙面或地板的地脚线或家具发生摩擦和刮碰而给其造成损坏,可不留死角的对地面进行拖抹。在扫抹的同时,扫抹机器人上的各种传感器和摄像头也对室内进行了全方位的巡视和监控。扫抹机器人在扫抹完地面以后,自动回到扫抹机器人基站进行充电和清洗长条布。完成以后,就可以再次对地面进行扫抹和巡视了。
18.扫抹机器人具有扫地、拖抹和巡视监控等多种功能,扫抹机器人基站能为扫抹机器人充电和清洗长条布。这样,极大的提高了清洁效率和安保能力。可节省人工,减少保洁人员或家庭成员的劳动强度。可在大型共建、写字楼、商场、地铁站和家庭地面清洁中广泛使用。
附图说明
19.图1为扫抹机器人的一种侧面结构示意图。
20.图2为扫抹机器人的一种底面结构示意图。
21.图3为扫抹机器人升降装置的结构示意图。
22.图4为扫抹机器人杠筒与缸套配合的截面结构示意图。
23.图5为扫抹机器人压板升降装置和监控升降装置的一种结构示意图。
24.图6为扫抹机器人监控升降装置的结构示意图。
25.图7为扫抹机器人一种壳体的俯视图。
26.图8为扫抹机器人一种安装长条布的结构示意图。
27.图9为扫抹机器人压板升降装置和监控升降装置的另一种安装示意图。
28.图10为扫抹机器人另一种壳体的俯视图。
29.图11为扫抹机器人的另一种侧面结构示意图。
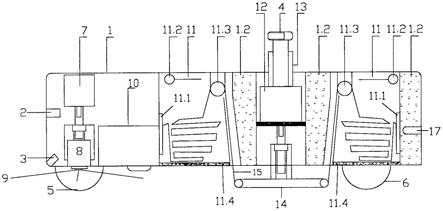
30.图12为扫抹机器人的另一种底面结构示意图。
31.图13为扫抹机器人另一种壳体的俯视图。
32.图14为扫抹机器人一种安装长条布和布块的结构示意图。
33.图15为扫抹地机器人另一种壳体的俯视图。
34.图16为扫抹机器人基站的侧面结构示意图。
35.图17为扫抹机器人基站的前面结构示意图。
36.图18为扫抹机器人基站的截面结构示意图。
37.在图中,1壳体 1.1底盘 2浸水传感器 3红外线传感器 4摄像头 5导向轮 6后轮 7升降装置 7.1升降电机 7.2丝杠 7.3杠筒 7.4缸套 8电机 9边刷 10吸尘装置 11堆布盒 11.1活动夹具 11.2电动拨动筒 11.3电动柱滚筒 11.4活动底板 12压板升降装置 13监控升降装置 13.1监控架 13.2电动轴 14宽滚压板 15长条布 16电池 17充电插座 18宽压板 19布块 20基壳 21充电仓 22坡道 23充电插头 24长条口 25活动插板 26齿条 27齿轮 28水盒 29声波器 30进水管 31电磁阀 32第一出水管 33风机 34风道 35第二出水管水管 36套管
38.具体实施方式1
39.本发明的具体实施例如附图所示。
40.见图1-2所示,所述的扫抹机器人的壳体1的前端上装有浸水传感器2和红外线传感器3。在壳体1底盘1.1前部上装有第一和第二升降装置7。见图3-4所示,所述的升降装置是升降电机7.1轴上装有丝杠7.2,在丝杠7.2上装有外圆带有凸长条形的杠筒7.3,在杠筒7.3外装有内圆带有凹长条形的缸套7.4。所述的缸套7.4装在底盘1.1上,第一和第二电机8分别装在杠筒7.3里,在第一和第二电机8的轴上分别装有边刷9。在第一和第二升降装置7后面装有吸尘装置10,在吸尘装置10后面镜像装有第一和第二堆布盒11,所述的第一和第二堆布盒11内分别装有活动夹具11.1,在堆布盒11内上角分别装有带拨动板的电动拨动筒11.2,在堆布盒11外上角豁口处分别装有带塑胶柱的电动柱滚筒11.3,堆布盒11下面分别装有活动底板11.4。见图1和图5所示,在第一和第二堆布盒11中间并且在壳体1的中心线上装有压板升降装置12。所述的压板升降装置12是第三升降装置7安装在壳体1的底盘1.1上。杠筒7.3上装有超过壳体1宽度的两侧带有滚筒的宽滚压板14。见图5-7所示,在第一和第二堆布盒11中间在压板升降装置12一侧装有监控升降装置13。所述的监控升降装置13是第四升降装置7倒置按装在壳体1的底盘1.1上,在第四升降装置的杠筒7.3里装有第三电机8,在第三电机8的轴上装有监控架13.1,在监控架13.1上装有电动轴13.2,摄像头4安装在电动轴13.2上。通过壳体1上偏一侧的圆孔1.3,监控升降装置13可以升起或降下,摄像头4可以通过第三电机8转动360度地监控周围的环境,通过电动轴13.2转动摄像头4就可以180度地监控前面、上面和后面的空间环境。见图1和图8所示,长条布15的一端安装在第一堆布盒11内装有第一活动夹具11.1上,另一端绕过第一堆布盒11外上角豁口处安装的带塑胶柱的电动柱滚筒11.3,在绕过宽滚压板14,在绕过第二堆布盒11外上角豁口处带塑胶柱的电动柱滚筒11.3安装在第二堆布盒11内装有的第二活动夹具上11.1上。电池16安装在1壳体里,充电插座17安装在1壳体的后端,壳体1的空隙处设有注水盒1.2,导向轮5安装在壳体1的前端底盘1.1上,两个后轮6分别安装在壳体1的底盘1.1后端两侧上。这样,扫抹地机器人就组装好了。
41.图9-10给出了扫抹机器人的压板升降装置12和监控升降装置13的另一种技术方案。所述的压板升降装置12由第三和第五升降装置7安装在壳体1的底盘1.1上,在第三和第五升降装置7的杠筒7.3上装有宽滚压板14。在第三和第五升降装置7中间并且是壳体1的中心线的位置上装有监控升降装置13。所述的监控升降装置13通过壳体1的中心线上的圆孔1.4升起或降下,摄像头4就可以通过第三电机8的转动360度地监控周围的环境,通过电动轴13.2的转动摄像头4就可以180度地监控前面、上面和后面的空间环境。
42.见图1和图8所示,在使用时,首先,打开扫抹机器人的电源开关。扫抹机器人的第一和第二升降装置7的升降电机7.1就转动杠筒7.3下降,装在杠筒7.3里的第一和第二电机8就会带动轴上的边刷9高速转动对地面进行清扫,地面上的灰尘就被吸入到吸尘装置10里。同时,压板升降装置12的升降电机7.1就转动带动宽滚压板14降下,压在宽滚压板14下面的长条布15就接触并湿抹地面。当湿抹一定面积后长条布15一部分已变脏的时候,压板升降装置12的升降电机7.1就反向转动带动宽滚压板14抬起脱离地面,同时,第一和第二堆布盒11外上角豁口处的两个电动柱滚筒11.3就分别同时逆时针转动,堆在第二堆布盒11内干净的长条布15由于受到电动柱滚筒11.3上带有塑胶柱的拨的作用,绕在两个电动柱滚筒11.3上的超宽的长条布15及边缘就被卷曲或放开,一卷一放的顺着第二堆布盒11外角豁口处放出来向前移动进入第一堆布盒11里,被收到第一堆布盒11里已经脏的那一部分长条布15并被内上角的电动拨动筒11.2的拨动板拨到第一堆布盒11底下。同时,压板升降装置12的升降电机7.1就转动带动宽滚压板14降下再次把一段干净的长条布15压在底下继续拖抹地面。当一段长条布15再次变脏了的时候,压板升降装置12的升降电机7.1就转动再次抬起或下降宽滚压板14,长条布15就再次卷起、前移、压触拖抹地面。如此往复运作,扫抹机器人就一直用一段干净的长条布15接触拖抹地面,把地面擦干净,而没有二次污染地面。
43.在开动扫抹机器人进行巡视时,壳体1前端装上装有浸水传感器2和红外线传感器3进行扫视观察,监控升降装置13会从壳体1上的圆孔1.3或1.4中升起,安装在其上面的摄像头4可以对水平方向360度和前、上及后方向180度地监控周围的环境,如果有水情和火情及等其它情况,就会通过电子声和网络进行报警通知主人。
44.具体实施方式2
45.本发明的具体实施例如附图所示。
46.见图11-12所示,所述的扫抹机器人的壳体1的前端上装有浸水传感器2和红外线传感器3。在壳体1底盘1.1前部上装有第一和第二升降装置7。见图3-4所示,所述的升降装置是升降电机7.1轴上装有丝杠7.2,在丝杠7.2上装有外圆带有凸长条形的杠筒7.3,在杠筒7.3外装有内圆带有凹长条形的缸套7.4。所述的缸套7.4装在底盘1.1上,第一和第二电机8分别装在杠筒7.3里,在第一和第二电机8的轴上分别装有边刷9。在第一和第二升降装置7后面装有吸尘装置10,在吸尘装置10后面镜像装有第一和第二堆布盒11,所述的第一和第二堆布盒11内分别装有活动夹具11.1,在堆布盒11内上角分别装有带拨动板的电动拨动筒11.2,在堆布盒11外上角豁口处分别装有带塑胶柱的电动柱滚筒11.3,第一和第二堆布盒11下面分别装有活动底板11.4。见图11和图5所示,在第一和第二堆布盒11中间并且在壳体1的中心线上装有压板升降装置12。所述的压板升降装置12是第三升降装置7安装在壳体1的底盘1.1上,杠筒7.3上装有超过壳体1宽度的两侧带有滚筒的宽滚压板14。见图5-6和图13所示,在第一和第二堆布盒11中间在压板升降装置12一侧装有监控升降装置13,所述的监控升降装置13是第四升降装置7倒置按装在壳体1的底盘1.1上,在第四升降装置的杠筒7.3里装有第三电机8,在第三电机8的轴上装有监控架13.1,在监控架13.1上装有电动轴13.2,摄像头4安装在电动轴13.2上。通过壳体1上偏一侧的圆孔1.3,监控升降装置13可以升起或降下,摄像头4可以通过第三电机8转动360度地监控周围的环境,通过电动轴13.2转动摄像头4就可以180度地监控前面、上面和后面的空间环境。见图11和14图所示,长条布15的一端安装在第一堆布盒11内装有第一活动夹具11.1上,另一端绕过第一堆布盒11外上角
豁口处安装的带塑胶柱的电动柱滚筒11.3,在绕过宽滚压板14,在绕过第二堆布盒11外上角豁口处带塑胶柱的电动柱滚筒11.3安装在第二堆布盒11内装有的第二活动夹具上10.1上。在第二堆布盒11后面的壳体1的底盘1.1上装有第六升降装置7,第六升降装置7的杠筒7.3上装有超过壳体1宽度的宽压板18,布块19活动安装宽压板18上。电池16安装在1壳体里,充电插座17安装在1壳体的后端,壳体1的空隙处设有注水盒1.2,在壳体1的底盘1.1前端装有导向轮5在后部的宽滚压板14和宽压板18之间的两侧装有两个后轮6。这样,扫抹机器人就组装好了。
47.图9-15给出了扫抹地机器人的压板升降装置12和监控升降装置13的另一种技术方案。所述的压板升降装置12由第三和第五升降装置7安装在壳体1的底盘1.1上,在第三和第五升降装置7的杠筒7.3上装有宽滚压板14。在第三和第五升降装置7中间并且是壳体1的中心线的位置上装有监控升降装置13。所述的监控升降装置13通过壳体1的中心线上的圆孔1.4升起或降下,摄像头4就可以通过第二电机8的转动360度地监控周围的环境,通过电动轴13.2的转动摄像头4就可以180度地监控前面、上面和后面的空间环境。
48.见图11和图14所示,在使用时,首先,打开扫抹机器人的电源开关。扫抹机器人的第一和第二升降装置7的升降电机7.1就转动杠筒7.3下降,装在杠筒7.3里的第一和第二电机8就会带动轴上装有的边刷9高速转动对地面进行清扫,地面上的灰尘就被吸入到吸尘装置10里。同时,压板升降装置12的升降电机7.1就转动带动宽滚压板14降下,压在宽滚压板14下面的长条布15就接触并湿抹地面。当湿抹一定面积后长条布15一部分已变脏的时候,压板升降装置12的升降电机7.1就反向转动带动宽滚压板14抬起脱离地面,同时,第一和第二堆布盒11外上角豁口处的两个电动柱滚筒11.3就分别同时逆时针转动,堆在第二堆布盒11内干净的长条布15由于受到电动柱滚筒11.3上带有塑胶柱的拨的作用,绕在两个电动柱滚筒11.3上的超宽的长条布15及边缘就被卷曲或放开,一卷一放的顺着第二堆布盒11外角豁口处放出来向前移动进入第一堆布盒11里,被收到第一堆布盒11里已经脏的那一部分长条布15并被内上角的电动拨动筒11.2的拨动板拨到第一堆布盒11底下。同时,压板升降装置12的升降电机7.1就转动带动宽滚压板14降下再次把一段干净的长条布15压在底下继续拖抹地面。当一段长条布15再次变脏了的时候,压板升降装置12的升降电机7.1就转动再次抬起或下降宽滚压板14,长条布15就再次卷起、前移、压触拖抹地面。如此往复运作,扫抹机器人就一直用一段干净的长条布15接触拖抹地面,把地面擦干净,而没有二次污染地面。同时,在第二堆布盒11后面的第六升降装置7也降下宽压板18,宽压板18上的布块19对地面进行干拖,湿抹后留在地上的水分就被宽压板18上的布块19拖干净了。这样,扫抹机器人就一次完成了扫地和湿抹及干拖,更好的对地面进行了清洁。
49.在开动扫抹机器人进行巡视时,壳体1前端装上装有浸水传感器2和红外线传感器3进行扫视观察,监控升降装置13会从壳体1上的圆孔1.3或1.4中升起,安装在其上面的摄像头4可以对水平方向360度和前、上及后方向180度地监控周围的环境,如果有水情和火情及等其它情况,就会通过电子声和网络进行报警通知主人。
50.具体实施方式3
51.本发明的具体实施例如附图所示。
52.见图16-18所示,所述的扫抹机器人基站的基壳20上面设有通气孔20.1,基壳20前面下部设有敞口的充电仓21,充电仓21口下有连接地面的坡道22,扫抹机器人可以顺着坡
道22进入到充电仓21里。所述的充电仓21的后壁板上装有充电插头23。充电仓21的底板开有长条口24,长条口24上装有两个活动插板25,两个活动插板25背面分别装有第一和第二齿条26,在第一和第二齿条26下装分别有第四和第五电机8,第四和第五电机8的轴上分别装有第一和第二齿轮27与第一和第二齿条26咬合,两个活动插板25在第四和第五电机8和第一和第二齿轮27及第一和第二齿条26作用下可以伸缩活动,可扩大长条口24或盖上长条口24。在长条口24下装有水盒28,水盒28下装有超声波的声波器29,水盒28上的进水管30上装有第一电磁阀31,水盒的第一出水管32上装有第二电磁阀31。在所述的基壳20里装有风机33,在风机33的吸风口装有风道34,风道34下端装有第二出水管35并与第一出水管32相通,第二出水管35装有第三电磁阀31,在风道34前端口上装有套管36,套管36上面设有气孔下面装有第三齿条26。在第三齿条26下装有第六电机8,在第六电机8轴上装有第三齿轮27与套管36下的第三齿条26咬合。在第六电机8和第三齿轮27及第三齿条26的作用下,套管36可以在充电仓21底板和水盒28之间的空挡伸缩活动。
53.见图16-18所示,所述的扫抹机器人在清洁完地面以后,自动导航到扫抹机器人基站并倒行顺着坡道22进入到充电仓21里。首先,扫抹机器人后端上的插座17插入到充电仓21的后壁板上的充电插头23里进行充电,充电仓21的底板长条口24与扫抹机器人的宽滚压板14位置相对应。启动第四和第五电机8,长条口24上装有的两个活动插板25在第四和第五电机8和第一和第二齿轮27及第一和第二齿条26作用下被移动到基壳20里,长条口24就扩大了并超过宽滚压板14,下面的水盒28完全就露出来了。打开水盒28上的进水管30的第一电磁阀31,自来水就流入的水盒28里。这时,扫抹机器人的第一堆布盒11上的电动柱滚筒11.3就顺时针转动把第一堆布盒11里已变脏的长条布15卷出来堆积到水盒28里,水盒28下的声波器29开始上作发出超声波,长条布15上的污迹和灰尘就被水中的超声波震荡下来,长条布15就清洗干净了。打开水盒28的第一出水管32上的第二电磁阀31,脏水就通过第一出水管32流入到下水道里。开启扫抹机器人基站的风机33,风道34前端口上的套管36在第六电机8和第三齿轮27及第三齿条26的作用下,套管36就伸出插在长条布15下把长条布15里的水分通过套管36上的气孔吸到风道34的下端进入到第二出水管35顺着相通的第一出水管32流入到下水道里。这时,扫抹机器人的第二堆布盒11上的电动柱滚筒11.3就转动把清洗好的长条布15全部卷入到第二堆布盒11里。这样,扫抹机器人通过在扫抹机器人基站里充电和长条布15的清洗,扫抹机器人就可以再次对室内的地面进行扫地和拖抹及巡视了。
54.以上所述,仅为本发明的较佳的具体实施方式,但本发明的保护范围并不局限于此,所有熟悉本技术领域的技术人员在本发明公开的技术范围内,根据本发明的技术方案及其本发明的构思加以等同替换或改变均应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1