滚刷结构和清洁机器人的制作方法
[0001]
本实用新型涉及清洁装置技术领域,尤其是涉及一种滚刷结构和清洁机器人。
背景技术:
[0002]
清洁机器人是一种智能机器人,其用于自动清洁商场、办公楼以及酒店等场景中的地面。
[0003]
目前清洁机器人的底部通常设置有滚刷,滚刷与电机连接,电机用于驱动滚刷转动。且滚刷与清洁机器人中的提升机构连接,滚刷能够在提升机构的带动下上升或者下降,从而远离地面而进入工作停止状态或者接触地面而进入工作状态。在清洁机器人清洁地面时,清洁机器人可以带动滚刷沿着清洁路径行走,此时滚刷接触地面且会在电机的驱动下转动,而转动的滚刷可以将垃圾扫抛向滚刷后侧垃圾盒中,达到清扫地面的效果。
[0004]
但是现有的清洁机器人中的滚刷与提升机构之间固定连接,当清洁机器人在清洁地面的过程中,行走至不平整的或者有障碍物的地面上时,滚刷易于碰撞到地面不平整处或者障碍物而导致清洁机器人倾倒翻转。
技术实现要素:
[0005]
本实用新型的目的在于提供一种滚刷结构和清洁机器人,以缓解现有技术中存在的清洁机器人中的滚刷与提升机构之间固定连接,当清洁机器人在清洁地面的过程中,行走至不平整的或者有障碍物的地面上时,滚刷易于碰撞到地面不平整处或者障碍物而导致清洁机器人倾倒翻转的技术问题。
[0006]
本实用新型提供的滚刷结构包括提升机构、缓冲机构和滚刷组件;
[0007]
缓冲机构连接在提升机构和滚刷组件之间,缓冲机构用于使得滚刷组件能够在外力作用下相对于提升机构浮动;
[0008]
提升机构用于带动滚刷组件上升或者下降。
[0009]
进一步的,缓冲机构包括上下浮动组件;
[0010]
上下浮动组件连接在提升机构的输出端和滚刷组件之间,上下浮动组件用于使得滚刷组件具有上下浮动余量。
[0011]
进一步的,上下浮动组件包括连接杆和抵接件,连接杆的其中一端与提升机构的输出端连接;
[0012]
滚刷组件的靠近提升机构的一侧设置有穿孔,抵接件位于滚刷组件上的穿孔的远离提升机构的一侧;
[0013]
连接杆的另一端穿过滚刷组件上的穿孔后与抵接件连接,滚刷组件能够沿连接杆的长度方向移动,抵接件能够与滚刷组件沿连接杆的长度方向相互抵接,以防止滚刷组件脱离连接杆。
[0014]
进一步的,上下浮动组件还包括弹性件,弹性件的其中一端与提升机构的输出端连接,弹性件的另一端与滚刷组件连接。
[0015]
进一步的,滚刷结构还包括底盘支架,缓冲机构还包括左右浮动组件;
[0016]
提升机构安装在底盘支架上,左右浮动组件通过底盘支架与提升机构连接;
[0017]
滚刷组件和左右浮动组件连接,左右浮动组件用于使得滚刷组件具有左右浮动余量。
[0018]
进一步的,左右浮动组件包括摆杆,摆杆的其中一端铰接在底盘支架的远离提升机构的一侧上,摆杆的另一端铰接在滚刷组件上。
[0019]
进一步的,摆杆的端部通过耳板铰接在底盘支架的远离提升机构的一侧上;
[0020]
耳板固定在底盘支架的远离提升机构的一侧上,且耳板上设置有穿孔;
[0021]
摆杆的其中一端通过第一水平轴转动连接在耳板上的穿孔中,且摆杆的端部和耳板之间存在间隙,摆杆的另一端通过第二水平轴与滚刷组件转动连接。
[0022]
进一步的,滚刷结构还包括导向组件,导向组件安装在提升机构和滚刷组件之间,导向组件用于为滚刷组件在提升机构的驱动下上升或者下降的过程导向。
[0023]
进一步的,导向组件包括导向板和导向轮,导向板与提升机构连接,导向轮转动连接在滚刷组件上;
[0024]
沿提升机构的输出端的输出方向,导向板上设置有条形的导向孔;
[0025]
导向轮安装在导向孔中,并能够在导向孔中沿导向孔的长度方向移动。
[0026]
本实用新型提供的清洁机器人包括上述技术方案中任一项所述的滚刷结构。
[0027]
此外,本发明还提供了另外一种技术方案,具体如下:
[0028]
所述清洁机器人还包括边刷组件;
[0029]
所述滚刷组件和边刷组件均安装在所述清洁机器人的底部,沿所述清洁机器人清洁路径的前进方向,所述边刷组件位于所述滚刷组件的前方,且所述边刷组件位于所述滚刷组件的端部的一侧。
[0030]
进一步的,所述边刷组件包括边刷电机、边刷和边刷驱动轴,所述边刷驱动轴安装在所述边刷中,所述边刷驱动轴与所述边刷电机连接,所述边刷电机用于驱动所述边刷自转。
[0031]
进一步的,所述清洁机器人还包括尘箱组件和吸风组件;
[0032]
所述滚刷组件包括滚刷和垃圾盒,在所述清洁机器人的清洁路径的前进方向上,所述垃圾盒位于所述滚刷的后端;
[0033]
所述垃圾盒、所述吸风组件和所述尘箱组件依次连通,所述吸风组件用于将所述垃圾盒中的垃圾吸入到所述尘箱组件中。
[0034]
进一步的,所述吸风组件包括吸风电机、吸风管和降噪管;
[0035]
所述吸风管和所述降噪管连通,且所述吸风管和所述降噪管连通在所述垃圾盒和所述尘箱组件之间;
[0036]
所述吸风电机与所述吸风管连通,所述吸风电机用于将所述垃圾盒中的垃圾送入到所述尘箱组件中。
[0037]
进一步的,所述尘箱组件包括尘箱、尘箱盖、过滤网、尘袋安装板和尘袋;
[0038]
所述尘箱的侧壁上设置有通风口和开口,所述尘箱盖盖合在所述尘箱的开口上;所述过滤网安装在所述通风口处,且所述通风口与所述吸风组件连通;
[0039]
所述尘袋安装板安装在所述尘箱中,所述尘袋与所述尘袋安装板连接,且所述尘
袋与所述滤网连通。
[0040]
进一步的,所述清洁机器人还包括电源动力单元和电器控制组件;
[0041]
所述电源动力单元用于为所述清洁机器人供电;所述电器控制组件与所述清洁机器人中的电器连接,以用于控制所述清洁机器人中的电器的工作状态。
[0042]
进一步的,所述清洁机器人还包括外壳组件,所述滚刷组件位于所述外壳组件内。
[0043]
进一步的,所述外壳组件包括前侧和后侧,所述外壳组件的前侧安装有平视摄像头、斜视摄像头和前超声传感器,所述平视摄像头、斜视摄像头和所述前超声传感器用于检测所述清洁机器人的前方的障碍物;
[0044]
所述外壳组件的后侧安装有后视摄像头、后超声传感器,所述后视摄像头和所述后超声传感器用于检测所述清洁机器人的后方的障碍物;
[0045]
所述外壳组件上还安装有防跌落传感器和气压防撞传感器。
[0046]
进一步的,所述外壳组件的顶部安装有伸缩把手,所述伸缩把手能够伸长或者缩短。
[0047]
本实用新型提供的滚刷结构和清洁机器人能产生如下有益效果:
[0048]
本实用新型提供的滚刷结构包括提升机构、缓冲机构和滚刷组件。缓冲机构连接在提升机构和滚刷组件之间,缓冲机构用于使得滚刷组件能够在外力作用下相对于提升机构浮动。提升机构用于带动滚刷组件上升或者下降。在利用带有本实用新型提供的滚刷结构的清洁机器人清洁地面时,提升机构先带动滚刷组件下降,使得滚刷组件接触地面,能够用于清扫地面的垃圾。当清洁机器人在清洁地面的过程中带动滚刷组件沿着清洁路径行走的过程中,滚刷组件碰撞到地面不平整处或者障碍物时,滚刷组件会受到地面不平整处或者障碍物的阻碍而具有远离地面不平整处或者障碍物移动的趋势。此时滚刷组件可以在缓冲机构的作用下相对于提升机构浮动,使得滚刷组件能够远离地面不平整处或者障碍物浮动,而不会使得滚刷组件带动提升机构和清洁机器人朝向远离地面不平整处或者障碍物的方向移动,进而可以防止清洁机器人倾倒翻转。
[0049]
与现有技术相比,本实用新型提供的滚刷结构利用缓冲机构可以在滚刷组件受到地面不平整处或者障碍物阻碍时,使得滚刷组件能够相对于提升机构浮动,而不会使得滚刷组件带动提升机构和清洁机器人朝向远离地面不平整处或者障碍物的方向移动,进而可以防止清洁机器人因滚刷组件受到地面不平整处或者障碍物阻碍而倾倒翻转。
[0050]
本实用新型提供的清洁机器人包括上述滚刷结构,因而本实用新型提供的清洁机器人与上述滚刷结构具有相同的有益效果。
附图说明
[0051]
为了更清楚地说明本实用新型具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0052]
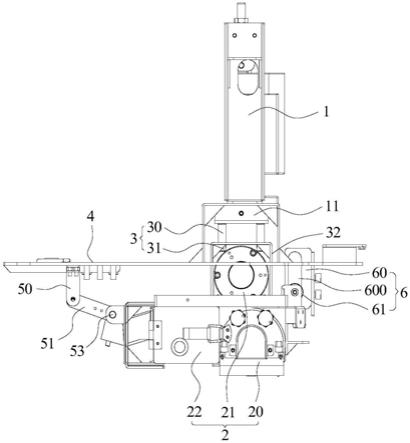
图1为本实用新型实施例一提供的滚刷结构的结构示意图;
[0053]
图2为图1中的滚刷结构的右视图;
[0054]
图3为图1中的滚刷结构的左视图;
[0055]
图4为图1中的滚刷结构的主视图;
[0056]
图5为图4中的a-a剖视图;
[0057]
图6为图5中的抵接件的结构示意图;
[0058]
图7为本实施例二提供的清洁机器人的结构示意图;
[0059]
图8为图7中的清洁机器人的内部结构示意图;
[0060]
图9为图8中的b-b剖视图。
[0061]
图标:1-提升机构;10-固定块;11-u形板;2-滚刷组件;20-滚刷罩;21-滚刷电机;22-垃圾盒;3-上下浮动组件;30-连接杆;31-抵接件;32-连接罩;4-底盘支架;5-左右浮动组件;50-耳板;51-摆杆;52-第一水平轴;53-第二水平轴;6-导向组件;60-导向板;600-导向孔;61-导向轮;7-边刷组件;8-吸风组件;9-外壳组件;90-伸缩把手。
具体实施方式
[0062]
下面将结合实施例对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0063]
实施例一:
[0064]
如图1、图2和图3所示,本实施例提供的滚刷结构包括提升机构1、缓冲机构和滚刷组件2。缓冲机构连接在提升机构1和滚刷组件2之间,缓冲机构用于使得滚刷组件2能够在外力作用下相对于提升机构1浮动。提升机构1用于带动滚刷组件2上升或者下降。
[0065]
在利用带有本实施例提供的滚刷结构的清洁机器人清洁地面时,提升机构1先带动滚刷组件2下降,使得滚刷组件2接触地面,能够用于清扫地面的垃圾。当清洁机器人在清洁地面的过程中带动滚刷组件2沿着清洁路径行走的过程中,滚刷组件2碰撞到地面不平整处或者障碍物时,滚刷组件2会受到地面不平整处或者障碍物的阻碍而具有远离地面不平整处或者障碍物浮动的趋势。此时滚刷组件2可以在缓冲机构的作用下相对于提升机构1浮动,使得滚刷组件2能够远离地面不平整处或者障碍物移动,而不会使得滚刷组件2带动提升机构1和清洁机器人朝向远离地面不平整处或者障碍物的方向移动,进而防止清洁机器人倾倒翻转。
[0066]
与现有技术相比,本实施例提供的滚刷结构利用缓冲机构可以在滚刷组件2受到地面不平整处或者障碍物阻碍时,使得滚刷组件2能够相对于提升机构1浮动,而不会使得滚刷组件2带动提升机构1和清洁机器人朝向远离地面不平整处或者障碍物的方向移动,进而可以防止清洁机器人因滚刷组件2受到地面不平整处或者障碍物阻碍而倾倒翻转。
[0067]
可以看出,本实施例提供的滚刷结构缓解了现有技术中存在的清洁机器人中的滚刷与提升机构1之间固定连接,当清洁机器人在清洁地面的过程中,行走至不平整的或者有障碍物的地面上时,滚刷易于碰撞到地面不平整处或者障碍物而导致清洁机器人倾倒翻转的技术问题。
[0068]
在实际应用中,提升机构1可以为电动推杆、气缸等伸缩驱动件。
[0069]
如图1、图2和图3所示,缓冲机构包括上下浮动组件3。上下浮动组件3连接在提升机构1的输出端和滚刷组件2之间,上下浮动组件3用于使得滚刷组件2具有上下浮动余量。
[0070]
上下浮动组件3用于使得滚刷组件2在受到地面不平处和障碍物的向上的挤压力时,能够相对于提升机构1向上浮动,而不会带动提升机构1向上移动,进而可以防止清洁机器人向上移动翻转。
[0071]
进一步的,如图4、图5和图6所示,上下浮动组件3包括连接杆30和抵接件31,连接杆30的其中一端与提升机构1的输出端连接。滚刷组件2的靠近提升机构1的一侧设置有穿孔,抵接件31位于滚刷组件2上的穿孔的远离提升机构1的一侧。连接杆30的另一端穿过滚刷组件2上的穿孔后与抵接件31连接,滚刷组件2能够沿连接杆30的长度方向移动,抵接件31能够与滚刷组件2沿连接杆30的长度方向相互抵接,以防止滚刷组件2脱离连接杆30。
[0072]
当提升机构1带动滚刷组件2向下移动时,提升机构1会带动连接杆30和与连接杆30连接的抵接件31向下移动,此时滚刷组件2可以向下移动。提升机构1停止移动后,向下移动的滚刷组件2会与抵接件31抵接,并保持在抵接件31所在位置处。
[0073]
当提升机构1带动滚刷组件2向上移动时,提升机构1会带动连接杆30和抵接件31向上移动,进而可以带动与抵接件31抵接的滚刷组件2向上移动。
[0074]
可以看出,提升机构1能够带动滚刷组件2上升或者下降。
[0075]
当滚刷组件2受到地面不平处和障碍物阻碍时,由于连接杆30是穿设在滚刷组件2上的穿孔中的,且抵接件31位于滚刷组件2的穿孔的远离提升机构1的一侧,因而滚刷组件2可以在连接杆30上相对于提升机构1向上浮动。在连接杆30上相对于提升机构1向上浮动的滚刷组件2越过地面不平处和障碍物后,可以在自身重力作用下向下浮动而回到原位,继续用于清扫地面。
[0076]
其中,连接杆30可以为塞打螺丝,抵接件31可以为螺母,抵接件31固定在滚刷组件2上,连接杆30的螺纹部分螺纹连接在抵接件31中。
[0077]
进一步的,上下浮动组件3还包括弹性件,弹性件的其中一端与提升机构1的输出端连接,弹性件的另一端与滚刷组件2连接。
[0078]
其中,弹性件可以为螺旋弹簧。此外,弹性件可以抵接在提升机构1和滚刷组件2之间。
[0079]
弹性件能够缓冲滚刷组件2的上下浮动过程,提升滚刷组件2的浮动过程的稳定性。
[0080]
如图1和图2所示,连接杆30与提升机构1的输出端之间可以通过固定块10和u形板11连接。其中,固定块10与提升机构1的输出端连接,u形板11的闭口端的内侧与固定块10的远离提升机构1的一侧连接,u形板11的闭口端的外侧与连接杆30的靠近提升机构1的端部连接。
[0081]
进一步的,连接杆30与滚刷组件2之间可以通过连接罩32连接在一起。连接罩32为槽状,连接罩32罩在滚刷组件2的一侧,且连接罩32的开口端与滚刷组件2连接。抵接件31固定在连接罩32的闭口端的靠近滚刷组件2的一侧,连接杆30的远离提升机构1的一端穿过连接罩32的闭口端后与抵接件31连接。
[0082]
如图1-图5所示,本实施例提供的滚刷结构还包括底盘支架4,缓冲机构还包括左右浮动组件5。提升机构1安装在底盘支架4上,左右浮动组件5通过底盘支架4与提升机构1连接。滚刷组件2和左右浮动组件5连接,左右浮动组件5用于使得滚刷组件2具有左右浮动余量。
[0083]
底板支架用于支撑提升机构1和左右浮动组件5。左右浮动组件5用于使得滚刷组件2在受到地面不平处和障碍物的向左侧或者右侧的挤压力时,能够相对于提升机构1向左侧或者右侧浮动,而不会带动提升机构1向左侧或者右侧移动,进而可以防止清洁机器人向左侧移动翻转或者向右侧移动翻转。
[0084]
如图4和图5所示,左右浮动组件5包括摆杆51,摆杆51的其中一端铰接在底盘支架4的远离提升机构1的一侧上,摆杆51的另一端铰接在滚刷组件2上。
[0085]
进一步的,摆杆51的端部通过耳板50铰接在底盘支架4的远离提升机构1的一侧上。耳板50固定在底盘支架4的远离提升机构1的一侧上,且耳板50上设置有穿孔。摆杆51的其中一端通过第一水平轴52转动连接在耳板50上的穿孔中,且摆杆51的端部和耳板50之间存在间隙,摆杆51的另一端通过第二水平轴53与滚刷组件2转动连接。
[0086]
其中,摆杆51的端部和耳板50之间存在的间隙为滚刷组件2相对于提升机构1向左侧或者右侧浮动提供移动空间。
[0087]
进一步的,如图4所示,摆杆51可以为两个,两个摆杆51分别通过第二水平轴53与滚刷组件2转动连接,且两个摆杆51相互平行。
[0088]
如图4所示,每个摆杆51的穿设有第一水平轴52的端部均设置有两个耳板50,该两个耳板50平行安装在底盘支架4的远离提升机构1的一侧上,摆杆51的穿设有第一水平轴52的端部位于两个耳板50之间。
[0089]
进一步的,底盘支架4上安装有前万向轮、两个车轮和轮毂电机,前万向轮和两个车轮呈三角形分布在底盘支架4的同侧。轮毂电机的输出端与两个车轮连接,用于带动两个车轮自转。
[0090]
其中,前万向轮和两个车轮的行走驱动可以采用三轮差速控制,进而可以缩短底盘支架4的旋转半径,使得底盘支架4的转向更灵活。
[0091]
如图5所示,本实施例提供的滚刷结构还包括导向组件6,导向组件6安装在提升机构1和滚刷组件2之间,导向组件6用于为滚刷组件2在提升机构1的驱动下上升或者下降的过程导向。
[0092]
导向组件6用于提升滚刷组件2和提升机构1之间的连接稳定性,以及提高提升机构1带动滚刷组件2升降过程的稳定性。
[0093]
需要说明的是,当提升机构1和滚刷组件2之间安装有导向组件6和摆杆51时,为了使得滚刷组件2能够左右浮动,滚刷组件2与提升机构1之间在导向组件6处在滚刷组件2左右浮动的方向上具有间隙。由于滚刷组件2的上下浮动过程中滚刷组件2的移动距离较小,且摆杆51的端部和耳板50之间存在间隙,因而当滚刷组件2左右浮动时,滚刷组件2能够左右浮动。
[0094]
如图5所示,导向组件6包括导向板60和导向轮61,导向板60与提升机构1连接,导向轮61转动连接在滚刷组件2上。沿提升机构1的输出端的输出方向,导向板60上设置有条形的导向孔600。导向轮61安装在导向孔600中,并能够在导向孔600中沿导向孔600的长度方向移动。
[0095]
导向轮61可以提升滚刷组件2随着提升机构1升降过程的顺畅性,使得提升机构1易于驱动滚刷组件2升降。
[0096]
其中,导向板60可以固定在底盘支架4上。
[0097]
进一步的,沿导向轮61的轴向,导向轮61和导向板60之间具有一定的间隙,以使滚刷组件2能够左右浮动。
[0098]
如图2和图3所示,滚刷组件2包括滚刷、滚刷罩20和滚刷电机21,滚刷电机21安装在滚刷罩20上方,滚刷安装在滚刷罩20内侧,且滚刷上穿设有传动轴。滚刷电机21的输出端和滚刷上的传动轴之间通过带轮和传动带连接在一起,滚刷电机21能够通过带轮和传动带驱动滚刷在滚刷罩20内自转,进而使得滚刷能够清扫地面。
[0099]
进一步的,滚刷组件2还包括垃圾盒22,垃圾盒22与滚刷罩20连通,且垃圾盒22在清洁机器人的清洁路径的前进方向上垃圾盒22位于滚刷的后端。滚刷工作时沿着清洁机器人的清洁路径向前清扫垃圾,并将垃圾扫抛向后侧的垃圾盒22中。
[0100]
为保护滚刷,滚刷罩20的与滚刷的端部对应位置处安装有端盖,端盖与滚刷罩20之间可拆卸连接。
[0101]
实施例二:
[0102]
如图7、图8和图9所示,本实施例提供的清洁机器人包括实施例一中的滚刷结构。
[0103]
进一步的,本实施例提供的清洁机器人还包括边刷组件7,滚刷组件2和边刷组件7均安装在清洁机器人的底部,沿清洁机器人清洁路径的前进方向,边刷组件7位于滚刷组件2的前方,且边刷组件7位于滚刷组件2的端部的一侧。
[0104]
边刷组件7用于清扫地面的墙角等狭窄处的垃圾,可以将滚刷不便于清扫的位置处的垃圾清扫至垃圾盒22中。
[0105]
其中,边刷组件7由边刷电机、边刷、边刷驱动轴组成,边刷驱动轴安装在边刷中,边刷驱动轴与边刷电机连接,边刷电机能够驱动边刷自转。
[0106]
此外,边刷组件7与滚刷组件2连接,可以随着滚刷组件2在提升机构1的驱动下一起升降。
[0107]
进一步的,该清洁机器人还包括尘箱组件和吸风组件8。滚刷组件2包括滚刷和垃圾盒22,在清洁机器人的清洁路径的前进方向上,垃圾盒22位于滚刷的后端。垃圾盒22、吸风组件8和尘箱组件依次连通,吸风组件8用于将垃圾盒22中的垃圾吸入到尘箱组件中。
[0108]
滚刷工作时沿着清洁机器人的清洁路径向前清扫垃圾,并将垃圾扫抛向后侧的垃圾盒22中。如果垃圾盒22满了,溢出的部分垃圾可以被吸入到尘箱组件中,正常工作时工作人员需定时将垃圾盒22中的垃圾倒掉。
[0109]
尘箱组件用于扩充盛放垃圾的空间,使得该清洁机器人能够收集更多灰尘和轻垃圾。
[0110]
吸风组件8包括吸风电机、吸风管和降噪管,吸风管和降噪管连通,且吸风管和降噪管连通在垃圾盒22和尘箱组件之间。吸风电机与吸风管连通,吸风电机用于将垃圾盒22中的垃圾送入到尘箱组件中。
[0111]
其中,尘箱组件包括尘箱、尘箱盖、过滤网、尘袋安装板和尘袋。尘箱的侧壁上设置有通风口和开口,尘箱盖盖合在尘箱的开口上;过滤网安装在通风口处,且通风口与吸风组件8连通。尘袋安装板安装在尘箱中,尘袋与尘袋安装板连接,且尘袋与滤网连通。
[0112]
尘袋与尘袋安装板之间可拆卸连接,当尘袋装满垃圾时,尘袋可以快速取出,换一个新尘袋或者将空尘袋装上去。尘袋与尘袋安装板之间可拆卸连接,便于更换尘袋。
[0113]
该清洁机器人还包括电源动力单元和电器控制组件,电源动力单元用于为清洁机
器人供电。电器控制组件与清洁机器人中的电器连接,以用于控制清洁机器人中的电器的工作状态。
[0114]
电源动力单元包括锂电池,电源动力单元用于为清洁机器人中的电器供电。
[0115]
电器控制组件由电机驱动器、继电器、保险丝等元器件组成,电器控制组件用于控制电机驱动器、继电器、保险丝等元器件工作。
[0116]
该清洁机器人还可以配有上位机控制盒和下位机控制盒,用于实现清洁机器人的自主行走、自主避障、自动报告任务详情、反馈任务进度和自主联动电梯以实现跨楼层作业等功能。
[0117]
进一步的,该清洁机器人可以采用智能语音、触屏等多种人性化交互方式,提升使用便捷性。本实施例提供的清洁机器人还包括外壳组件9,滚刷组件2位于外壳组件9内。外壳组件9包括前侧和后侧,外壳组件9的前侧安装有平视摄像头、斜视摄像头和前超声传感器,平视摄像头、斜视摄像头和前超声传感器用于检测清洁机器人的前方的障碍物。外壳组件9的后侧安装有后视摄像头、后超声传感器,后视摄像头和后超声传感器用于检测清洁机器人的后方的障碍物。外壳组件9上还安装有防跌落传感器和气压防撞传感器。
[0118]
可以看出,本实施例提供的清洁机器人采用多种传感器可以实现避障、防撞、防打滑、防跌落等功能,提升了该清洁机器人的安全可靠性。
[0119]
进一步的,外壳组件9的顶部安装有伸缩把手90,伸缩把手90能够伸长或者缩短。
[0120]
伸缩把手90能够满足不同高度的操作人员。
[0121]
本实施例提供的清洁机器人包括实施例一中的滚刷结构,因而本实施例提供的清洁机器人与实施例一中的滚刷结构能够解决相同的技术问题,达到相同的技术效果。
[0122]
本实施例提供的清洁机器人同样缓解了现有技术中存在的清洁机器人中的滚刷与提升机构1之间固定连接,当清洁机器人在清洁地面的过程中,行走至不平整的或者有障碍物的地面上时,滚刷易于碰撞到地面不平整处或者障碍物而导致清洁机器人倾倒翻转的技术问题。
[0123]
最后应说明的是:以上各实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1