炒食机的自动翻炒装置的制作方法
1.本实用新型是有关一种炒食机的自动翻炒装置,系一用于制作食物料理的自动化或半自动化设备,尤指具有自动翻炒食材、料理的设备结构。
背景技术:
2.科技进步带给人类生活相当多的便利性,自动化的设备节省了更多的人力成本与改善人力上可能带来的技术性问题,另外,人口成长,人类对于饮食需求大增,许多餐厅、餐馆为确保料理品质的稳定性,从食材的来源、制作、比例配置、时间分配以及温度调控等制作过程都有系统化的规范,但在料理食物上以及菜品标准化,仍必须透过厨师来完成,有鉴于此,如能以一套具自动化的设备来完成其具系统化的制作过程,以节省人力需求,并能提高出品效率。
3.因此,提供可自动翻炒食材的设备,并透过可选择性设定以及控制翻炒食材的自动化设置,达成可透过人力设定辅助完成制作多种不同料理的炒食机,如此为本实用新型炒食机的自动翻炒装置的解决方案。
技术实现要素:
4.本实用新型的目的在于提供一种炒食机的自动翻炒装置,其结构简单,操作方便,维护便捷,能克服现有技术的缺陷,更好的进行翻炒和制作,具有更高的实用性能。
5.为实现上述目的,本实用新型公开了一种炒食机的自动翻炒装置,其特征在于包含:
6.一机台本体,具有至少一支撑体;
7.一炒食锅,具有至少一中空的外壳体架设于该支撑体上,该外壳体与一伺服马达相互枢设,该伺服马达确定旋转角度以控制该外壳体的工作位置,该外壳体由外向内凹设有一凹槽,该凹槽内枢设有一内炒锅,该内炒锅的底部枢设有一内锅马达,该外壳体上固设有一刮板,该刮板延伸至该内炒锅内部,又该内炒锅外围设置有一耐热支板,在该耐热支板外侧贴设有一发热线圈、一感温装置以及至少一散热器从而该感温装置通过该耐热支板来感测该内炒锅外壁的温度以进一步控制对该内炒锅加热的温度;
8.一食材翻炒装置,具有一固设于该支撑体上的固定架体,该固定架体上设置有一轨道杆,该轨道杆上装设有一收送气缸,该收送气缸上固设有一活动架体,该活动架体上装设有一转动马达,该转动马达接设有一翻炒装置,该翻炒装置上组装有至少一拨片从而该收送气缸带动该活动架体于该轨道杆上来回移动而使得该翻炒装置伸入或伸出该内炒锅且在该翻炒装置伸入该内炒锅里面时拨片位于该刮板旁;
9.一总控制器,分别与该伺服马达、该内锅马达、该发热线圈、该感温装置、该散热器、该收送气缸和该转动马达相连结。
10.其中,该凹槽的开口边缘处设有至少二个导轮。
11.其中,该凹槽的开口边缘处设有一导板,该导板相对的位于二个导轮之间。
12.其中,该刮板靠近该内炒锅内壁但不相贴于该内炒锅内壁。
13.其中,该拨片的数量设为1、2、3或4个。
14.其中,该伺服马达确定的旋转角度包含令外壳体进行不同工作的一热锅角度、一翻炒角度、一倒出角度与一清洗角度。
15.其中,该热锅角度介于75
°‑
85
°
之间,该翻炒角度介于67
°‑
77
°
之间,该倒出角度介于110
°‑
152
°
之间,而该清洗角度介于205
°‑
215
°
之间。
16.其中,该外壳体外侧设有一与该总控制器相连结的位差感测装置且该位差感测装置感测该外壳体转动的最起始与最终点的位置以限制该外壳体得以在安全的角度范围内动作。
17.其中,该位差感测装置分别具有一起始判位块、一终点判位块、一起始感测端与一终点感测端,其中,该起始判位块与该终点判位块分别装设在该外壳体外侧相对于该支撑体的表面上,而该起始感测端与该终点感测端则分别装设在该支撑体外侧相对于该外壳体的表面上从而该外壳体在转动时若该起始感测端感测了该起始判位块或者该终点感测端感测了该终点判位块则该总控制器便控制该伺服马达停止转动。
18.由此,本实用新型正式启动后,外壳体在经热锅,可依照料理的需求,依序添加所需的食材,该收送气缸可带动该活动架体与该翻炒装置伸入该内炒锅,而该翻炒装置在翻炒的过程中会不断的拨动翻搅食物,让食材、调味与受热分布的更均匀,且该拨片会将食材翻起并拨向该刮板,可有效打散结块的食材,亦可透过此动作将肉或菜内部的汁液打出,提升炒饭的风味。
附图说明
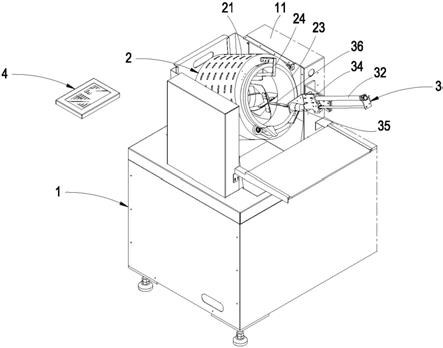
19.图1:本实用新型自动炒食机的整体结构立体示意图。
20.图2:本实用新型自动炒食机的炒食锅结构剖面示意图。
21.图3:本实用新型自动炒食机的炒食锅结构平面示意图。
22.图4a:本实用新型自动炒食机的食材翻炒装置设有4个拨片立体示意图。
23.图4b:本实用新型自动炒食机的食材翻炒装置设有1个拨片立体示意图。
24.图4c:本实用新型自动炒食机的食材翻炒装置设有2个拨片立体示意图。
25.图4d:本实用新型自动炒食机的食材翻炒装置设有3个拨片立体示意图。
26.图5a:本实用新型自动炒食机的位于热锅角度剖面示意图。
27.图5b:本实用新型自动炒食机的位于翻炒角度剖面示意图。
28.图5c:本实用新型自动炒食机的位于倒出角度剖面示意图。
29.图5d:本实用新型自动炒食机的位于清洗角度剖面示意图。
30.图6:本实用新型自动炒食机的实施翻炒食材剖面示意图。
31.图7:本实用新型自动炒食机的实施翻炒食材俯视示意图。
32.图8:本实用新型自动炒食机的增设位差感测装置立体分解示意图。
33.图9a:本实用新型自动炒食机的外壳体位于起始位置平面示意图。
34.图9b:本实用新型自动炒食机的外壳体位于终点位置平面示意图。
具体实施方式
35.有关于本实用新型其他技术内容、特点与功效,在以下配合参考图式的较佳实施例的详细说明中,将可清楚的呈现。
36.请参阅图1,为本实用新型炒食机的自动翻炒装置的整体结构立体示意图,如图中所示,至少包含一机台本体1、一炒食锅2、一食材翻炒装置3与一总控制器4。
37.其中,该机台本体1上具有至少一支撑体11。
38.其中,该炒食锅2,请一并参阅图1
‑
图3,具有至少一中空的外壳体21架设于该支撑体11上,该外壳体21与一伺服马达22相互枢设,在本实施例中,该伺服马达22系安装于该支撑体11内,并用于确定旋转角度以控制该外壳体21的工作位置,该外壳体21由外向内凹设有一凹槽211,以及在该凹槽211开口的边缘处分别设有至少二个导轮212,在该外壳体21的凹槽211开口的边缘处另可设有一导板 213,该导板213系相对的位于二个该导轮212之间,接着,该凹槽211内枢设有一内炒锅23,该内炒锅23的底部枢设有一内锅马达231,该内锅马达231系用于带动该内炒锅23转动,在本实施例中,该内锅马达231系安装于该凹槽211底部,该外壳体21上又固设有一刮板24,该刮板24系延伸至该内炒锅23内部,且该刮板24系靠近而不相贴于该内炒锅23内壁,又该内炒锅23外围设置有一玻璃制的耐热支板 25,在该耐热支板25外侧贴设有一发热线圈26、一感温装置27以及至少一散热器 28,该感温装置27系得通过该耐热支板25来感测该内炒锅23外壁的温度,进一步的用于控制对该内炒锅23加热的温度。
39.其中,该食材翻炒装置3,请一并参阅图1、图4a,具有一固设于该支撑体11 上的固定架体31,该固定架体31上则设置有一轨道杆32,该轨道杆32上则装设有一收送气缸33,该收送气缸33上固设有一活动架体34,该活动架体34上装设有一转动马达35,该转动马达35接设有一翻炒装置36,该翻炒装置36上并组装有至少一拨片361,该收送气缸33可带动该活动架体34于该轨道杆32上来回,使得该翻炒装置36可伸入或伸出该内炒锅23,且在该翻炒装置36伸入该内炒锅23里面时,该拨片361系位于该刮板24旁,请一并参阅图4a、图4b、图4c、图4d,每个实施例分别为不同数量的该拨片361,其中分别为1、2、3或4个该拨片361。
40.其中,该总控制器4,系分别与该伺服马达22、该内锅马达231、该发热线圈 26、该感温装置27、该散热器28、该收送气缸33与该转动马达35相连结,以利于控制各元件的作动及其参数,其可选择式的设定为自动或手动模式。
41.本实用新型的炒食机的自动翻炒装置,请参阅图5a,该伺服马达22确定的旋转角度能使得该外壳体21在不同的角度值范围对应的动作,且该外壳体21皆是透过该伺服马达22的驱动而转至特定动作所预定的旋转角度的位置(为避免过多赘述,故后段内容不再特别叙述该外壳体21是透过该伺服马达22的驱动),正式启动后,该外壳体21转至一热锅角度a1,在该热锅角度a1时,该内锅马达231与该发热线圈26会同时启动,该发热线圈26隔着该耐热支板25对该内炒锅23加热,利用该内锅马达231带动该内炒锅23转动,使得加热得以均匀,待该感温装置27测得该内炒锅23达一预定温度时添加油料,持续的让油于该内炒锅23中均匀加热,待该感温装置27测得该内炒锅23与油达一预定温度时,便完成了热锅的程序,之后便可进行后续的料理炒煮,本实施例以炒饭做为说明,首先打入鸡蛋或添加蛋液,请参阅图5b,该外壳体21再转至一翻炒角度a2进行炒蛋,蛋翻炒一预定时间后,再加入其他配料(例如火腿、肉丝、蔬菜)继续翻炒,配料翻炒一预定时间后,再加入米饭,最后则是加入调味
品(葱、蒜、盐巴等)继续翻炒,收干完成炒饭后,请参阅图5c,该外壳体21转至一倒出角度a3,将炒饭倒出至一容器内,请参阅图5d,接着,该外壳体21转至一清洗角度a4,以利于将该内炒锅23进行清洗。
42.下列为该伺服马达22所确定的该外壳体21位于不同工作需求的各个旋转角度范围,可一并参阅图5a、图5b、图5c、图5d,各角度包括是该热锅角度a1、该翻炒角度a2、倒出角度a3与清洗角度a4,各角度系由该外壳体21以垂直状态作为 0
°
为基准起算,各角度所对应的动作列表如下:
[0043][0044]
本实用新型的炒食机的自动翻炒装置,请参阅图6、图7、图8,该翻炒装置 36在翻炒的过程中会不断的拨动翻搅食物,以炒饭为例,适当的翻搅,可让食材、调味与受热分布的更均匀,且翻搅过程中,该拨片361会不断通过该刮板24 旁且不会相互干涉撞击,并将食材翻起并拨向该刮板24,使得食材可被打在该刮板24上,因此,可有效打散结块的米饭甚至
是其他相粘的食材,让炒饭的颗粒更为分明与均匀,亦即,火腿、肉丝、蔬菜等其他食材亦可透过此动作将肉或菜内部的汁液打出,再被拨动翻搅于米饭中,提升炒饭的风味,且经由于食材都是先打在刮板24上,更可避免沾锅情况发生。
[0045]
本实用新型的炒食机的自动翻炒装置,请参阅图1
‑
2、图8
‑
9a、图9b,该外壳体21外侧可设有一与该总控制器4相连结的位差感测装置29,该位差感测装置 29系用于感测该外壳体21转动的最起始与最终点的位置,以限制该外壳体21得以在安全的角度范围内动作,该位差感测装置29系分别具有一起始判位块291、一终点判位块292、一起始感测端293与一终点感测端294,其中,该起始判位块291 与该终点判位块292系分别装设在该外壳体21外侧相对于该支撑体11的表面上,而该起始感测端293与该终点感测端294则系分别装设在该支撑体11外侧相对于该外壳体21的表面上,该外壳体21在转动时,若该起始感测端293感测了该起始判位块291,或者该终点感测端294感测了该终点判位块292,该总控制器4便皆得控制该伺服马达22停止转动,在本实施例中,该起始感测端293感测了该起始判位块291时,该外壳体21系位于8
°
的位置,而该终点感测端294感测了该终点判位块292时,该外壳体21系位于215
°
的位置,故该外壳体21安全的角度范围系介于 8
°‑
215
°
之间,由于该外壳体21不得超出起始与终点的角度范围,因此该外壳体21仅能以反转的方式回归待机位置,进而可避免连续翻转,造成线圈缠绕。
[0046]
上述的实施例揭露,仅是本实用新型部分较佳的实施例选择,然其并非用以限定本实用新型,任何熟悉此一技术领域具有通常知识者,在了解本实用新型前述的技术特征及实施例,并在不脱离本实用新型的精神和范围内所做的均等变化或润饰,仍属本实用新型涵盖的范围,而本实用新型的专利保护范围须视本说明书所附的请求项所界定者为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1