用于自动包裹终端的装载器的制作方法
用于自动包裹终端的装载器
1.优先权
2.本申请要求于2019年6月18日提交的美国临时申请第62/862,773号的优先权,所述美国临时申请的内容通过引用全部并入本文。
技术领域
3.本实用新型涉及自主服务式包裹终端领域,更具体地涉及用于递送、发送、接收和存储包裹、包装、邮件和其他邮政对象的方法的领域。
背景技术:
4.从现有技术中已知用于控制邮政对象的插入和排出的不同包裹终端解决方案和过程,其中每个包裹都存储在单独的储物柜或搁架中。有多种已知的用于自动仓库堆叠解决方案的解决方案,例如us2016176633和 jp2017013948。对于这些类型的解决方案,还有许多用于起重机和装载器移动包裹的已知解决方案。此类解决方案的示例在出版物wo201806872和 us20150225216等中进行了描述。
5.然而,自动化仓库解决方案不一定具有自主服务式包裹终端所必需的功能。这些设备需要设计为供未经培训的用户使用,因此需要解决安全性和简便性。
6.自主服务式终端的最简单类型是储物柜类型的终端,客户可以在其中使用特定的储物柜。这些设备和相关方法的示例在例如us9,604,259和 us10,043,151中公开。在更复杂和高级的解决方案中,自助服务式终端通常具有入口,包裹可以在所述入口处被插入到终端中并从所述终端接收。这些设备通常具有一个运输设备,所述运输设备在终端内部移动并将寄存的包裹装载到终端内部的搁架中。因此,终端具有各种自动移动部件。具有移动运输装置的存储终端的示例在例如wo2018068072或 us2012/0029687中公开。
7.本公开提供了一种由于小尺寸、耐用性和可购性而用于包裹终端,特别是用于小型零售商的自主服务式包裹终端的简单且可靠的装载器。
技术实现要素:
8.本公开解决了现有技术和其他技术的上述缺点。本公开提供了一种用于自主服务式终端的简单且可靠的装载器。本文提供的解决方案是安全且经济的,比现有技术中已知的设备更具可购性。根据本公开的装置还可以被构造成具有小尺寸。此外,根据本公开的设备安静地操作。利用这些特征,所述设备是小型零售商特别需要的。
9.本实用新型的目的是提供一种用于自动包裹终端的装载器,所述装载器被配置成附接到所述包裹终端的支柱并且包括:主框,所述主框具有带有水平部分和两个竖向部分的u形形状;两根第一导轨,所述两根第一导轨安装在所述主框的所述水平部分上并且被配置成在所述主框的所述水平部分上支撑包裹托盘;导轨系统,所述导轨系统安装在所述第一导轨之间,与所述第一导轨平行;以及磁性头部,所述磁性头部被配置成沿所述导轨系统移动以推动或拉动所述包裹托盘进出所述装载器,其中,所述导轨系统包括两个平行板,所
述磁性头部的第二导轨安装在所述两个平行板中的每个平行板的顶部上,并且传动带组装在所述两个平行板之间,并且其中,所述磁性头部包括外壳、电磁体以及至少一个推动器,所述外壳具有竖向部分和水平部分,所述电磁体被配置成附接到所述包裹托盘的金属板,所述至少一个推动器安装在所述外壳的背离所述水平部分的所述竖向部分上,并且所述外壳的所述水平部分将所述磁性头部附接到所述导轨系统上,并且其中,所述传动带与附接到所述主框的电动马达组件连接。
10.根据一个实施例,所述装载器的所述u形主框的所述竖向部分具有滚子,所述滚子被配置成将所述装载器附接到所述包裹终端的支柱。
11.根据一个实施例,所述u形主框的每个竖向部分具有调节板,所述调节板被配置成与所述包裹终端的支柱的提升传动带接合。
12.根据又一个实施例,所述装载器的所述传动带具有松散端,所述松散端通过固定板而固定到所述外壳的所述水平部分上。
13.根据某些实施例,所述装载器的所述电动马达组件具有电动马达和齿轮箱,所述齿轮箱具有固定到滑轮的轴,并且所述传动带通过一组空闲滚子和所述滑轮连接到所述电动马达组件。
附图说明
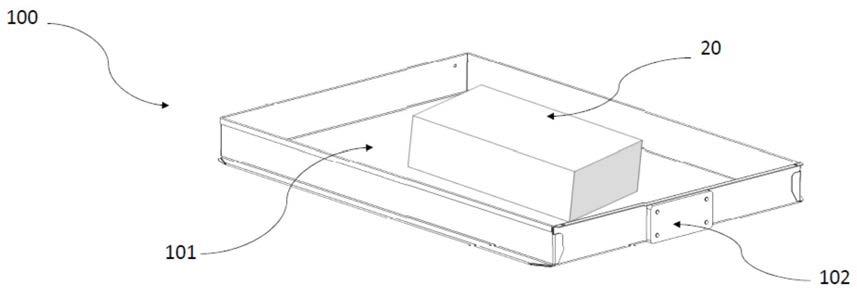
14.图1是包裹托盘100的图示。所述图示出了托盘基座101上的包裹20。在托盘的一端上示出了金属板102。
15.图2是装载器200的图示。所述图示出了装载器的u形主框201。两个第一导轨202安装在主框内,彼此相距一定距离,使得第一导轨能够支撑托盘。线性导轨系统204a安装在第一导轨202之间并且与第一导轨平行,所述线性导轨系统包括两根第二导轨204。传动带205在导轨系统204a的这两根第二导轨之间运行,磁性头部300沿所述传动带移动。所述图还示出了附接到u形框的电动马达组件203和附接在u形框的竖向部分中的两个竖向部分上的调节板210。还示出了调节螺钉206和滚子209。
16.图3是磁性头部300的图示。磁性头部具有电磁体301、位于电磁体两侧上的两个推动器302、电磁体和推动器附接在其上的外壳303。外壳具有水平部分303a和竖向部分303b。电磁铁和推动器附接到外壳的竖向部分上。磁性头部另外具有至少一个传感器304。
17.图4更详细地示出了电动马达组件203。所述组件包括电动马达211和具有传动轴(不可见)的齿轮箱212。电动马达和齿轮箱联接在一起。传动滑轮213固定在齿轮箱的传动轴上,并且这促进扭矩从马达传递到传动带系统。选择马达的转速、减速比和传动滑轮大小,以使移动速度和系统扭矩达到最佳平衡。所述图还示出了具有两个侧惰轮214的欧米茄(omega) 型带路径,传动带205(如图2所示)在所述侧惰轮上运行。惰轮确保最大数量的带齿连接到传动滑轮。惰轮和齿轮箱固定到支撑结构215上,所述支撑结构将整个电动马达组件连接到装载器的主框201上(如图2所示)。
18.图5示出了装载器的传动带张紧系统的详细视图。传动带205的两个松散端向上引导穿过磁性头部外壳303中的开口。将带的这些端推入到位于带固定板217的两侧上的槽216中。张紧支架218将带固定板固持在适当位置中,但是只要固定螺钉219松动,就允许上下移动。张紧螺钉220 用于将带固定板推离磁性头部外壳,从而张紧整个带系统。一旦达到
期望的张力,固定螺钉219就被固定以提供防止松动的额外的安全性。使用带双面槽的带固定板允许以最小的空间建造张紧组件。
19.图6是支柱的梁408的水平横截面,装载器的主框201通过滚子209 附接到所述梁上。滚子装配在支柱梁的竖向引导槽419中,以引导装载器在支柱上的竖向移动。所述图还示出了装载器的主框上的提升传动带411 和调节板210,传动带运行通过所述提升传动带和所述调节板。
具体实施方式
20.本文公开了一种用于存储和移交预定物品的用于自动室内自主服务式包裹终端的装载器。
21.自主服务式包裹终端使用包裹托盘100来存储不同大小的包裹20并在终端内移动所述包裹。图1示出了托盘的示意图示。托盘的使用允许存储各种尺寸和模糊形状的包裹,而不会对其包装施加严格要求。如图1所示,包裹托盘包括托盘基座101和位于一端上的金属板(优选为钢板)102。金属板是电磁体301的附接点,所述电磁体用于将包裹托盘移动到装载器上和从装载器移开。
22.包裹托盘基座101优选地具有斜切的角和锥形侧面,以将包裹托盘引导到两个搁架支撑柱之间或引导到装载器。托盘基座可以由不同的材料制成,包含但不限于钢、不锈钢、不同的热塑性塑料和复合材料。根据某些实施例,当将除了电磁体之外的物体被用作附接装置时,包裹托盘不具有金属/钢板102。根据某些实施例,不需要钢板的附接装置可以是吸杯。根据某些实施例,托盘的材料容易磁化,并且在此类情况下,钢板不是必需的。
23.图2展示了装载器。装载器200具有u形主框201,其充当装载器所有其他部件的连接点。一对第一导轨202放置在u形主结构内,所述一对第一导轨安装成彼此相距一定距离,使得当包裹托盘100沿着导轨顶部上的装载器移动时,所述第一导轨引导所述包裹托盘。第一导轨安装在主结构上,并且如果需要,可以轻松更换。第一导轨的材料,如聚甲醛(聚缩醛或类似物)非常耐用和坚固,这确保其具有很长的寿命和承载最大重量包裹托盘的能力。第一导轨202优选地具有锥形端,以在包裹托盘100被从搁架柱拉出时将所述包裹托盘引导到装载器上。
24.在第一导轨202之间,线性导轨系统204a平行于用于磁性头部300继续移动的第二导轨安装。导轨系统包括两个平行板207,第二导轨204附接到所述两个平行板中的每个平行板。图3详细展示了磁性头部。磁性头部具有电磁体301,所述电磁体与装载器的移动方向对齐,并且指向包裹终端一侧上的搁架柱。在可替代实施例中,磁性头部是双面的,这将使装载器能够从装载器的两侧拾取包裹托盘。根据优选实施例,装载器能够将包裹托盘移入和移出终端的搁架柱。如图2所示,磁性头部安装在线性导轨系统204a上。除了电磁体之外,磁性头部包括两个推动器302和将部件连接在一起的外壳303。外壳具有水平部分303a和竖向部分303b。磁性头部通过外壳的水平部分303a安装到线性导轨系统204a上。电磁铁和推动器附接到竖向部分上,使得其背离水平部分。电磁体可以相对于外壳而移动,这使得能够补偿任何潜在的包裹托盘装载或装载位置不准确。电磁铁悬挂在外壳上,其悬挂程度足以跨过装载器的边缘以抓住放置在搁架柱中的包裹托盘。推动器优选地定位于电磁铁的相对侧。推动器连接到定位于外壳303 上的传感器304,并提供信号来限定包裹托盘是否附接到
电磁体。如果出现任何剩余磁性,则推动器还有助于将包裹托盘推离电磁体,以确保当支柱或支柱升降机开始移动时,包裹托盘不会附接到磁性头部上。
25.磁性头部通过图2所示的电动马达组件203和传动带205移动。传动带在装载器的两端具有易于检修的调节螺钉206,其允许改变传动带系统的最末端滚子的角度,以确保传动带的移动尽可能呈线性,并且还调节带的张力。将带有滚子的传动带系统放置在导轨系统204a的两个板207之间,所述两个板沿着装载器的整个长度延伸。在装载器的一端处有一个磁性头部的原位传感器208。
26.图4中更详细地展示了电动马达组件203。所述组件包括电动马达211 和具有传动轴(图中不可见)的齿轮箱212。电动马达和齿轮箱联接在一起。传动滑轮213固定在齿轮箱的传动轴,并且这促进扭矩从马达传递到带传动系统。选择马达的转速、减速比和传动滑轮的大小,以使移动速度和系统扭矩达到最佳平衡。传动带205运行通过带有两个侧惰轮214的欧米茄型带路径,以确保最大数量的带齿连接到传动滑轮。惰轮和齿轮箱固定到支撑结构215上,所述支撑结构将整个电动马达组件连接到装载器的主框 201上。
27.图5示出了装载器的传动带张紧系统的详细视图。带张紧系统布置在磁性头部的外壳的水平部分303a上。张紧支架218安装到外壳的水平部分 303a上,并且带固定板217安装在张紧支架218内。传动带205的两个松散端向上引导穿过磁性头部外壳303的水平部分303a中的开口。带固定板 217在其两侧具有槽216,带的松散端通过所述槽被推入。张紧支架218将带固定板固持在适当位置中,但是只要固定螺钉219松动,就允许上下移动。张紧螺钉220用于将带固定板推离磁性头部外壳,从而张紧整个带系统。一旦达到期望的张力,固定螺钉219就被固定以提供防止松动的额外的安全性。使用带双面槽的带固定板允许以最小的空间建造张紧组件。
28.装载器通过定位于装载器主结构两侧处的滚子209相对于终端的支柱而定位。图2示出了滚子,并且图6示出了滚子209在将装载器的框201 固定到支柱的梁408上的作用。滚子易于更换,并且优选覆盖有聚氨酯层,以确保寿命并且沿着支柱梁静音移动。图6示出了滚子如何装配在支柱梁的竖向引导槽419中,以引导装载器在支柱上的竖向移动。滚子沿着磁性头部的移动方向和支柱的传动方向将装载器定位在支柱上。为了补偿装载器的制造公差并确保装载器的第一导轨202总是形成平行于对应搁架柱的水平面,使用两个竖向可调节板210将装载器附接到提升传动带411。图6 示出了可调节板210与传动带之间的连接。
29.元件清单:
30.20
‑
包裹
31.100
‑
包裹托盘
32.101
‑
托盘基座
33.102
‑
金属/钢板
34.200
‑
装载器
35.201
‑
主框
36.202
‑
第一导轨
37.203
‑
电动马达组件
38.204a
‑
线性导轨系统
39.204
‑
第二导轨
40.205
‑
传动带
41.206
‑
调节螺钉
42.207
‑
板
43.208
‑
原位传感器
44.209
‑
滚子
45.210
‑
调节板
46.211
‑
电动马达
47.212
‑
齿轮箱
48.213
‑
传动滑轮
49.214
‑
侧惰轮
50.215
‑
支撑结构
51.216
‑
带固定板的槽
52.217
‑
带固定板
53.218
‑
张紧支架
54.219
‑
固定螺钉
55.220
‑
张紧螺钉
56.300
‑
磁性头部
57.301
‑
电磁体
58.302
‑
推动器
59.303
‑
外壳
60.303a
‑
外壳的水平部分
61.303b
‑
外壳的竖向部分
62.304
‑
传感器
63.408
‑
支柱的梁
64.411
‑
提升传动带
65.419
‑
竖向引导槽
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1