一种拖吸机器人的制作方法
[0001]
本实用新型涉及到清洁地面的智能清洁领域,具体涉及到一种拖吸机器人。
背景技术:
[0002]
现有扫地机器人为了实现拖地清洁功能,大部分在扫地机器人的底部安装有平面结构的拖地模块,通过一平面结构的抹布来对地面进行拖地清洁效果,但是拖地效果相对较差、效率偏低;主要原因为拖地模块与地面的摩擦力较小,且因受到扫地机器人自身重量的限制导致拖地模块与地面之间的压力较小,同时拖地模块本身无法运动导致其与地面无法实现高频次的反复拖地效果;因此需要扫地机器人长时间多次往复进行地面清洁;但整体清洁效果还是较差,清洁效率偏低。
[0003]
部分扫地机器人通过在底部设置旋转运动的拖地模块,但是拖地模块的拖地面积小,无法实现覆盖到扫地机器人最大外径的整个宽度范围内来进行拖地,且无法实现多次拖地的效果,导致拖地清洁效果差,同时效率偏低;现有的扫地机器人在拖地清洁的过程中无法实现分步拖地清洁,使得其拖地清洁效果差,容易残留垃圾在地面上,且容易将垃圾压接在地面上难以被拖地模块清洁脱离。
技术实现要素:
[0004]
本实用新型旨在至少在一定程度上解决上述相关技术中的技术问题之一。
[0005]
为此,本实用新型的目的在于提供一种拖吸机器人,主要解决现有的扫地机器人对地面的拖地范围小、效果差、效率低的问题,以及解决现有的扫地机器人无法实现分步拖地清洁的问题。
[0006]
本实用新型的实施方式提供了一种拖吸机器人,包括:拖吸机器人主体,所述拖吸机器人主体内安装有垃圾盒,所述拖吸机器人主体的底部设置有吸尘口,所述吸尘口与所述垃圾盒设置为相连通的结构使得地面的垃圾通过所述吸尘口进入到所述垃圾盒内被收集;所述拖吸机器人主体的底部的前侧设置有第一清洁件,所述第一清洁件设置为可贴合地面水平旋转来进行拖地清洁的结构,当所述第一清洁件与地面相互接触时其接触的部分形成一平面结构;所述第一清洁件在水平方向上的中心位置位于所述吸尘口的前侧;所述拖吸机器人主体的底部还设置有第二清洁件,所述第二清洁件设置可运动来进行拖地清洁的结构,当所述第二清洁件与地面相互接触时其接触的部分形成一平面结构;所述第二清洁件在水平方向上的中心位置位于所述吸尘口的后侧;所述第一清洁件包括第一旋转件、第二旋转件,所述第一旋转件、第二旋转件分别位于所述拖吸机器人主体的底部的前侧的两侧位置;所述第二清洁件在水平方向上的一侧端面位于所述第一旋转件在水平方向上的靠近所述吸尘口的侧端面以外且位于所述第一旋转件在水平方向上的远离所述吸尘口的侧端面以内;所述第二清洁件在水平方向上的另一侧端面位于所述第二旋转件在水平方向上的靠近所述吸尘口的侧端面以外且位于所述第二旋转件在水平方向上的远离所述吸尘口的侧端面以内。
[0007]
前述的一种拖吸机器人,所述第一旋转件和第二旋转件的水平旋转方向相反,并设置为沿所述拖吸机器人主体的底部的外侧朝向内侧且沿所述拖吸机器人主体的底部的前侧朝向后侧的方向水平旋转。
[0008]
前述的一种拖吸机器人,所述第一旋转件和第二旋转件在水平方向上的远离所述吸尘口的侧端面位于所述拖吸机器人主体的最大外径位置的两侧侧端面以内。
[0009]
前述的一种拖吸机器人,所述拖吸机器人主体的底部的左右两侧分别设置有用于行走的驱动轮,所述驱动轮在竖直方向上位于所述第一清洁件与所述第二清洁件之间。
[0010]
前述的一种拖吸机器人,左右两侧的所述驱动轮在竖直方向上分别位于所述第一旋转件的两侧端面之间和所述第二旋转件的两侧端面之间。
[0011]
前述的一种拖吸机器人,所述第二清洁件在水平方向上的两侧端面分别位于左右两侧的所述驱动轮靠近所述吸尘口的侧端面以外使得当所述拖吸机器人主体行走时所述第二清洁件至少覆盖所述驱动轮在地面上行走压过的区域的一部分。
[0012]
前述的一种拖吸机器人,所述拖吸机器人还包括万向轮,所述万向轮在水平方向上位于所述第一旋转件和第二旋转件之间,且所述万向轮在竖直方向上位于所述第二清洁件在水平方向上的两侧端面之间。
[0013]
前述的一种拖吸机器人,所述第二清洁件包括第三旋转件、第四旋转件,所述第三旋转件、第四旋转件设置为可贴合地面水平旋转来进行拖地清洁的结构,当所述第三旋转件、第四旋转件水平旋转时所述第三旋转件和所述第四旋转件在水平方向上的内侧端面相互接触。
[0014]
前述的一种拖吸机器人,所述第三旋转件、第四旋转件的水平旋转方向相反,并设置为沿所述拖吸机器人主体的底部的外侧朝向内侧且沿所述拖吸机器人主体的底部的后侧朝向前侧的方向水平旋转。
[0015]
前述的一种拖吸机器人,所述第二清洁件包括旋拖件,所述旋拖件设置为可相对地面旋转滚动的结构;所述旋拖件至少包括第一旋拖件和/或第二旋拖件,当所述旋拖件包括第一旋拖件和第二旋拖件时所述第一旋拖件和第二旋拖件的旋转滚动方向相反。
[0016]
前述的一种拖吸机器人,所述第一旋拖件的旋转滚动方向为沿所述拖吸机器人主体的前侧朝向后侧的方向旋转滚动且与所述拖吸机器人主体的前进方向相反;所述第二旋拖件的旋转滚动方向为沿所述拖吸机器人主体的后侧朝向前侧的方向旋转滚动且与所述拖吸机器人主体的前进方向相同。
[0017]
前述的一种拖吸机器人,所述第一旋拖件和第二旋拖件之间至少设置为相互接触干涉的结构使得所述第一旋拖件和第二旋拖件的外表面至少相互接触干涉形成刮擦。
[0018]
前述的一种拖吸机器人,所述第二清洁件与地面相互接触时其接触的部分形成一平面结构的压接变形高度大于所述第一清洁件与地面相互接触时其接触的部分形成一平面结构的压接变形高度。
[0019]
前述的一种拖吸机器人,所述拖吸机器人主体内设置有储水箱,所述储水箱连接安装有出水器,所述出水器设置为同步或交替向所述第一清洁件、第二清洁件供水的结构。
[0020]
前述的一种拖吸机器人,还包括清洗座,所述清洗座相对所述拖吸机器人主体设置为独立的结构,所述清洗座上设置有放置所述第一清洁件和/或第二清洁件的清洗槽,所述清洗槽至少包覆所述第一清洁件和/或第二清洁件的侧部的一部分并形成相对密闭的结
构。
[0021]
前述的一种拖吸机器人,当所述第一清洁件或第二清洁件在位于地面上进行拖地清洁时的旋转方向与当所述第一清洁件或第二清洁件在位于所述清洗槽内被所述清洗槽内的水淹没进行清洗时的旋转方向至少包括相反;或当所述第一清洁件或第二清洁件的一部分被所述清洗槽内的水淹没进行清洗时所述第一清洁件或第二清洁件的旋转方向与当所述第一清洁件或第二清洁件与所述清洗槽内的水分离进行甩干时所述第一清洁件或第二清洁件的旋转方向至少包括相反。
[0022]
与现有技术相比,本实用新型具有如下有益效果:
[0023]
本方案通过设置前侧的第一清洁件和后侧的第二清洁件,在共同分布的结构下实现拖地覆盖范围的最大化,第二清洁件对第一清洁件形成补偿清洁范围的作用,两者共同实现拖吸机器人最大外径宽度的拖地覆盖范围。
[0024]
本方案的第一清洁件和第二清洁件实现分步的前后多次拖地清洁效果,第一清洁件对地面的垃圾预先处理,在预先拖地清洁的过程中还主要将地面的垃圾刮擦并聚集引导至吸尘口位置被吸取到垃圾盒内,第二清洁件然后对地面进行深度清洁,两者共同实现更好的拖地清洁效果,且提升效率。
[0025]
本方案的第一清洁件、第二清洁件结合吸尘口的位置和驱动轮的位置,实现前后位置限定的分布布置,有利于地面的垃圾更多的进入到吸尘口被吸取到垃圾盒内,同时可以针对驱动轮行走压过的区域进行清洁处理,实现取得更好的清洁效果,避免在地面留下拖地后驱动轮行走的痕迹。
[0026]
本方案还通过设置第一清洁件水平旋转运动的结构,同时第二清洁件也可以设置为水平旋转的运动的结构,通过限定第一清洁件的水平旋转运动方向和第二清洁件的水平旋转运动方向形成对水平旋转过程中产生的力的抵消,杜绝因第一清洁件、第二清洁的运动导致影响拖吸机器人行走的问题发生,在实现取得更好的清洁效果下,同步实现拖吸机器人的正常行走。
[0027]
本方案还通过设置第一清洁件水平旋转运动的结构,同时第二清洁件可以设置为旋转滚动的运动的结构,第一清洁件水平旋转实现对地面的刮擦并使得垃圾聚集向吸尘口,起到引导垃圾移动的效果,第二清洁件滚动实现强力切削处理地面垃圾的效果,通过第一清洁件预先处理地面垃圾,第二清洁件更容易将地面的垃圾切削脱离地面,实现取得更好的拖地清洁效果,
[0028]
本方案的拖吸机器人因第一清洁件和第二清洁件设置为可运动的结构,能利用其可运动的结构设置对应的清洗座,当拖吸机器人位于清洗座上时此时可以实现第一清洁件和第二清洁件的自动清洗、甩干的效果,不需要人为的手动拆卸进行清洗。
[0029]
同时本方案通过设置第一清洁件、第二清洁件在拖地清洁时的旋转方向与第一清洁件、第二清洁件在清洗槽内进行清洗时的旋转方向相反,有利于将第一清洁件、第二清洁件内吸附的垃圾被清洗出,提高清洗的干净度效果;并设置第一清洁件、第二清洁件在清洗槽内进行清洗时的旋转方向与第一清洁件、第二清洁件在清洗槽内甩干时的旋转方向相反,有利于将清洗后的第一清洁件和第二清洁件甩干,进而快速实现甩水并保持微润的效果。
附图说明
[0030]
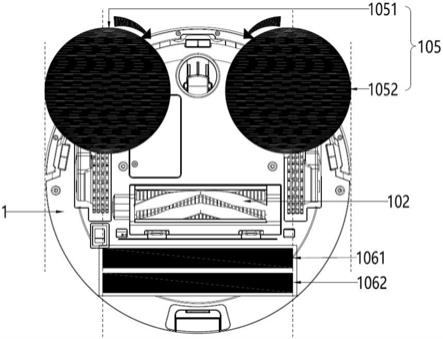
图1为拖吸机器人底部的第一清洁件、第二清洁件、驱动轮及整体结构的布局示意图;
[0031]
图2为拖吸机器人底部的第一清洁件、第二清洁件及整体结构的示意图;
[0032]
图3为第二清洁件包括第三旋转件和第四旋转件及整体结构的示意图;
[0033]
图4为第二清洁件包括第一旋拖件和第二旋拖件及整体结构的示意图;
[0034]
图5为第一旋转件和第二旋转件对地面垃圾的带动示意图;
[0035]
图6为拖吸机器人的侧面分布示意图;
[0036]
图7为第一旋拖件和第二旋拖件干涉以及出水器供水的示意图;
[0037]
图8为第一清洁件和第二清洁件处于自然状态下的示意图;
[0038]
图9为第一清洁件和第二清洁件位于地面上的示意图;
[0039]
图10为拖吸机器人位于地面拖地清洁时第二旋转件和第二清洁件的旋转方向示意图;
[0040]
图11为拖吸机器人位于清洗座内清洗时第二旋转件和第二清洁件的旋转方向示意图;
[0041]
图12为拖吸机器人位于清洗座内甩干时第二旋转件和第二清洁件的旋转方向示意图;
[0042]
图13为拖吸机器人位于清洗座内的清洗槽内进行清洗时的示意图;
[0043]
附图标记:1-拖吸机器人主体,101-垃圾盒,102-吸尘口,103-储水箱,104-出水器,105-第一清洁件,1051-第一旋转件,1052-第二旋转件,106-第二清洁件,1061-第一旋拖件,1062-第二旋拖件,1063-第三旋转件,1064-第四旋转件,107-驱动轮,108-万向轮,2-清洗座,201-清洗槽。
具体实施方式
[0044]
为了使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施例,进一步阐述本实用新型。
[0045]
实施例:本实用新型的一种拖吸机器人,如图1至图13构成所示,本方案的拖吸机器人包括:拖吸机器人主体1,拖吸机器人主体1可以设置为圆形结构或方形结构,拖吸机器人具备对地面的吸尘清洁功能和拖地清洁功能,针对吸尘功能,所述拖吸机器人主体1内安装有垃圾盒101,且所述拖吸机器人主体1的底部设置有吸尘口102,所述吸尘口102与所述垃圾盒101设置为相连通的结构使得地面的垃圾通过所述吸尘口102进入到所述垃圾盒101内被收集;吸尘口102连接垃圾盒101,垃圾盒101的一侧连接风机,风机提供气流的吸力来实现通过吸尘口102吸取地面的垃圾进入到垃圾盒101内被收集;针对拖地清洁功能,设置第一清洁件105和第二清洁件106来自身运动对地面进行大摩擦力进行清洁,且拖地清洁的面积大;所述拖吸机器人主体1的底部的前侧设置有第一清洁件105,所述第一清洁件105设置为可贴合地面水平旋转来进行拖地清洁的结构,当所述第一清洁件105与地面相互接触时其接触的部分形成一平面结构;现有的扫地机器人虽然也安装有拖地模块,但是拖地模块直接贴合在地面上接触相切或平齐,其拖地效果相对较差,本方案通过设置第一清洁件105在地面上接触时通过拖吸机器人自身力的作用下或者其运动带来的旋转力的作用下使
得接触的部分形成平面结构来实现第一清洁件105与地面之间保持足够大的恒压力,有利于将地面清洁干净,起到强力去污的效果。
[0046]
可选地,第一清洁件105的底部设置为弧面结构,使得第一清洁件105与地面接触时的压力压接变性高度沿第一清洁件105的中心向外逐渐降低,即为实现第一清洁件105的中心位置与地面接触时的压力压接变形高度最大,此时中心位置与地面贴合较紧密有利于第一旋转件1051围绕中心旋转时保持一定的稳定性,不会出现较大的偏心甩动;第一清洁件105的底部外沿位置与地面贴合较松有利于保持清洁效果的同时不会造成第一清洁件105与地面的摩擦力过大的问题,如图5所示,同时可以使得地面的垃圾在第一清洁件105的旋转过程中带动其由内向外移动,使得垃圾特别是较大的垃圾沿第一清洁件105的底部由内向外移动并对垃圾形成较大的离心甩力,垃圾可以被有效的带动甩出到吸尘口102附近的位置被吸取,提升对垃圾的吸取效率,且清洁效果更好。
[0047]
本方案中第一清洁件105与吸尘口102的位置,主要设置所述第一清洁件105在水平方向上的中心位置位于所述吸尘口102的前侧;即为设置第一清洁件105的中心水平线位于吸尘口102的前侧,此时可以根据需要来设置吸尘口102与第一清洁件105之间的距离,为了有利于吸尘口102吸取地面垃圾,此时可以将吸尘口102向上距离第一清洁件105的中心水位线相对较为靠近,有利于第一清洁件105旋转时将垃圾推送到吸尘口102位置;当第一清洁件105设置为柱形结构时,此时可以将第一清洁件105设置在相对靠近圆心但不与第一清洁件105干涉的位置,更有利于吸尘口102接收吸取第一清洁件105带动推送的垃圾。
[0048]
为了针对对第一清洁件105的拖地清洁范围形成补偿清洁效果和前后多次分步清洁效果,本方案在所述拖吸机器人主体1的底部还设置有第二清洁件106,所述第二清洁件106设置可运动来进行拖地清洁的结构,当所述第二清洁件106与地面相互接触时其接触的部分形成一平面结构;同样的现有的拖吸机器人虽然也安装有拖地模块,但是拖地模块直接贴合在地面上接触相切或平齐,其拖地效果相对较差,本方案通过设置第一清洁件105在地面上接触时通过拖吸机器人自身力的作用下或其运动的旋转力作用下使得接触的部分形成平面结构来实现第一清洁件105与地面之间保持足够大的恒压力,有利于将地面清洁干净;第二清洁件106可以设置为水平旋转结构,也可以设置为旋转滚动结构。
[0049]
其中,第二清洁件106与吸尘口102的位置限定为,所述第二清洁件106在水平方向上的中心位置位于所述吸尘口102的后侧;第一清洁件105、吸尘口102、第二清洁件106前中后分布布置形成预先拖地处理再吸取垃圾后进入深度清洁的分步清洁效果,有地面对地面顽固脏污的处理;同时第二清洁件106对第一清洁件105形成补偿清洁范围的作用,两者共同实现拖吸机器人最大外径宽度的拖地覆盖范围。
[0050]
具体地,所述第一清洁件105包括第一旋转件1051、第二旋转件1052,所述第一旋转件1051、第二旋转件1052分别位于所述拖吸机器人主体1的底部的前侧的两侧位置;设置对应的第一旋转件1051和第二旋转件1052来实现对地面的左右拖地清洁,可以实现对地面的垃圾进行带动引导聚集向吸尘口102,主要设置所述第一旋转件1051和第二旋转件1052的水平旋转方向相反,并设置为沿所述拖吸机器人主体1的底部的外侧朝向内侧且沿所述拖吸机器人主体1的底部的前侧朝向后侧的方向水平旋转;如图3所示,第一旋转件1051和第二旋转件1052的水平旋转方向相反可以实现两者产生的旋转力的抵消,避免因水平旋转带来阻力而影响拖吸机器人的正常行走;通过设置第一旋转件1051和第二旋转件1052沿拖
吸机器人主体1的底部的前侧朝向后侧的方向水平旋转使得第一旋转件1051和第二旋转件1052均能起到带动地面的垃圾从前向后聚集到吸尘口102位置区域附近,实现对垃圾的集中聚集吸取效果,同时实现对旋转力的相互抵消。
[0051]
其中,第二清洁件106对第一清洁件105进行补偿清洁效果的具体结构为,设置所述第二清洁件106在水平方向上的一侧端面位于所述第一旋转件1051在水平方向上的靠近所述吸尘口102的侧端面以外且位于所述第一旋转件1051在水平方向上的远离所述吸尘口102的侧端面以内;实现第二清洁件106的一侧端面位于第一清洁件105能够覆盖到地面进行清洁的区域范围内,进而实现第一清洁件105和第二清洁件106在水平方向上的衔接或至少部分重叠覆盖地面区域进行拖地清洁的效果,不会出现遗漏无法拖到的区域的问题;同时设置所述第二清洁件106在水平方向上的另一侧端面位于所述第二旋转件1052在水平方向上的靠近所述吸尘口102的侧端面以外且位于所述第二旋转件1052在水平方向上的远离所述吸尘口102的侧端面以内,实现第二清洁件106的另一侧端面位于第一清洁件105能够覆盖到地面进行清洁的区域范围内,进而实现第一清洁件105和第二清洁件106在水平方向上的衔接或至少部分重叠覆盖地面区域进行拖地清洁的效果,不会出现遗漏无法拖到的区域的问题;通过对第二清洁件106的两侧端面与第一清洁件105的位置限定,实现第二清洁件106对第一清洁件105形成补偿效果,第一清洁件105无法拖到的区域可以用第二清洁件106来进行补偿拖地清洁,实现在水平方向上对地面的可覆盖区域的完整性。
[0052]
为了实现拖吸机器人在单次行走的过程中的拖地清洁范围最大,本方案设置所述第一旋转件1051和第二旋转件1052在水平方向上的远离所述吸尘口102的侧端面位于所述拖吸机器人主体1的最大外径位置的两侧侧端面以内;即可以确保拖吸机器人在行走进行拖地清洁的过程中第一旋转件1051和第二旋转件1052在拖吸机器人主体1的两侧能够清洁到的范围最大,此时拖吸机器人可以沿墙边、障碍物边沿行走且能实现对边角的拖地清洁处理效果;同时拖吸机器人在室内往返的过程中实现单次拖地清洁过的区域最大,如拖吸机器人在进行弓字行走的过程中相邻两条行走过的区域一次推进实现拖地清洁,不需要相邻两条行走过的区域重叠即可实现对室内的地面进行单次行走就可完成无遗漏进行拖地清洁,有利于提升拖地清洁的效率;且不存在遗漏的地面区域未被清洁到的问题。
[0053]
针对本方案中驱动轮107与第一清洁件105、第二清洁件106的位置关系,所述拖吸机器人主体1的底部的左右两侧分别设置有用于行走的驱动轮107,驱动轮107带动拖吸机器人主体1在地面上进行行走来实现对室内各个区域的清洁,本方案中所述驱动轮107在竖直方向上位于所述第一清洁件105与所述第二清洁件106之间;即为使得第一清洁件105位于驱动轮107的前侧,第二清洁件106位于驱动轮107的后侧,实现前后分布布置的结构,可避开驱动轮107来实现较大的拖地范围。
[0054]
其中,可将吸尘口102设置在左右两侧的驱动轮107之间,同时使得吸尘口102位于第一清洁件105和第二清洁件106之间,有利于地面的垃圾聚集向吸尘口102位置被吸取。
[0055]
本方案中,左右两侧的所述驱动轮107在竖直方向上分别位于所述第一旋转件1051的两侧端面之间和所述第二旋转件1052的两侧端面之间;如图1所示,即为其中一个驱动轮107位于第一旋转件1051的两侧端面之间,实现拖吸机器人在行走的过程中该驱动轮107行走压过的区域为第一旋转件1051拖地清洁过的区域;另一个驱动轮107位于第二旋转件1052的两侧端面之间,实现拖吸机器人在行走的过程中该驱动轮107行走压过的区域为
第二旋转件1052拖地清洁过的区域;确保第一旋转件1051和第二旋转件1052的可拖地清洁范围,同时防止第一旋转件1051和第二旋转件1052将地面的垃圾推送到驱动轮107位置,地面的垃圾在第一旋转件1051和第二旋转件1052带动的过程中会沿两侧驱动轮107之间的位置区域内进入到吸尘口102内,有利于吸尘口102对垃圾的吸取。
[0056]
本方案中,所述第二清洁件106在水平方向上的两侧端面分别位于左右两侧的所述驱动轮107靠近所述吸尘口102的侧端面以外使得当所述拖吸机器人行走时所述第二清洁件106至少覆盖所述驱动轮107在地面上行走压过的区域的一部分;拖吸机器人在行走的过程中,因第一旋转件1051和第二旋转件1052对地面进行了预先拖地清洁处理,此时驱动轮107在地面旋转行走时会在第一旋转件1051和第二旋转件1052拖地清洁过的区域上留下行走痕迹,因驱动轮107其本身也会有一定的灰尘等颗粒物垃圾进而被粘附在地面上,此时第二清洁件106在后侧对驱动轮107行走压过的地面区域进行拖地清洁处理,能实现将驱动轮107在地面上行走的痕迹消除并拖干净,使得地面能保持干净状态;可选的,第二清洁件106在水平方向上两侧端面分别位于左右两侧的所述驱动轮107靠近所述吸尘口102的侧端面以外使得当所述拖吸机器人行走时所述第二清洁件106至少覆盖所述驱动轮107在地面上行走压过的区域的一部分或全部分,这样能全部消除驱动轮107在地面上留下的行走痕迹,实现对地面的二次拖地清洁效果,清洁效果更彻底。
[0057]
可选的,第二清洁件106在水平方向上两侧端面分别位于左右两侧的所述驱动轮107远离所述吸尘口102的侧端面以外使得当所述拖吸机器人行走时所述第二清洁件106覆盖所述驱动轮107在地面上行走压过的地面区域的全部,实现第一清洁件105和第二清洁件106与驱动轮107的结合进行对地面的多次清洁和分步拖地清洁效果。
[0058]
针对拖吸机器人,在所述拖吸机器人设置还包括万向轮108,万向轮108位于驱动轮107的前方用于转向,即为万向轮108位于拖吸机器人前侧也为前进方向的前侧,针对万向轮108与第一清洁件105和第二清洁件106的位置限定为,所述万向轮108在水平方向上位于所述第一旋转件1051和第二旋转件1052之间,且所述万向轮108在竖直方向上位于所述第二清洁件106在水平方向上的两侧端面之间;实现在水平方向上万向轮108能够位于拖吸机器人主体1的底部的前侧中间位置,方便转向,但存在第一清洁件105无法覆盖到万向轮108的缺点;通过在竖直方向上通过限定位于在第二清洁件106的两侧端面之间,实现当拖吸机器人行走过程中虽然第一清洁件105无法清洁到万向轮108的位置,但是万向轮108行走压过的地面区域可以被第二清洁件106覆盖进行清洁,使得第一清洁件105和第二清洁件106结合实现对拖吸机器人最大直径宽度范围的全面覆盖进行拖地清洁,不存在无法清洁到的区域,实现可覆盖清洁的面积大。
[0059]
本方案的第二清洁件106可以分为两种方式,第一种方式为第二清洁件106可相对地面水平旋转来清洁地面,第二种方式为第二清洁件106可相对地面旋转滚动来清洁地面,可根据需要来具体设定,均可实现对地面的深度清洁效果。
[0060]
针对本方案的第二清洁件106,可以为第一种方式,具体为,所述第二清洁件106包括第三旋转件1063、第四旋转件1064,所述第三旋转件1063、第四旋转件1064设置为可贴合地面水平旋转来进行拖地清洁的结构,当所述第三旋转件1063、第四旋转件1064水平旋转时所述第三旋转件1063和所述第四旋转件1064在水平方向上的内侧端面相互接触;如图3所示,第三清洁件和第四清洁件位于拖吸机器人主体1的底部的后侧两侧位置,且两者的内
侧端面相互接触形成对该区域的全面覆盖进行拖地清洁;不会出现无法清洁到的区域,并与第一旋转件1051和第二旋转件1052形成前后分布布置,实现对拖吸机器人最大外径宽度范围上的覆盖清洁地面。
[0061]
其中,所述第三旋转件1063、第四旋转件1064的水平旋转方向相反,并设置为沿所述拖吸机器人主体1的底部的外侧朝向内侧且沿所述拖吸机器人主体1的底部的后侧朝向前侧的方向水平旋转;如图3所示,第三旋转件1063和第四旋转件1064水平旋转方向相反能彼此抵消旋转力,避免影响拖吸机器人正常的行走;并形成将地面的垃圾聚集推向吸尘口102位置,第一旋转件1051、第二旋转件1052、第三旋转件1063、第四旋转件1064的旋转方式的设定可以实现在水平方向上和竖直方向上的旋转力均被彼此相互抵消,不会影响拖吸机器人的正常行走。
[0062]
在拖吸机器人向前行走中,第一旋转件1051和第二旋转件1052位于前侧,先对地面进行预先清洁,第三旋转件1063和第四旋转件1064位于后侧对地面进行深度清洁,且补偿清洁第一旋转件1051和第二旋转件1052无法清洁到的区域,实现可清洁区域覆盖面积大。
[0063]
针对本方案的第二清洁件106,可以为第二种方式,具体为所述第二清洁件106包括旋拖件,所述旋拖件设置为可相对地面旋转滚动的结构;第一清洁件105水平旋转实现对地面的刮擦并使得垃圾聚集向吸尘口102,起到引导垃圾移动的效果,第二清洁件106滚动实现强力切削处理地面垃圾的效果,通过第一清洁件105预先处理地面垃圾,第二清洁件106更容易将地面的垃圾切削脱离地面,实现取得更好的拖地清洁效果;其中,所述旋拖件至少包括第一旋拖件1061和/或第二旋拖件1062,当所述旋拖件包括第一旋拖件1061和第二旋拖件1062时所述第一旋拖件1061和第二旋拖件1062的旋转方向相反;若仅设置第一旋拖件1061或第二旋拖件1062,此时虽然也能实现对地面的旋转滚动拖地效果,但是会出现影响拖吸机器人正常行走的问题;本方案通过设置旋拖件包括第一旋拖件1061和第二旋拖件1062并设置其旋转滚动方向相反,可以实现旋转滚动的力的抵消,不会影响对拖吸机器人的正常行走,同时,能取得更好的拖地清洁效果,第一旋拖件1061和第二旋拖件1062通过两个不同的方向对地面上的垃圾进行切削刮擦,更有利于对地面上附着力较强的垃圾脏污进行清洁脱离地面,起到强力去污的效果。
[0064]
在拖吸机器人向前行走中,第一旋转件1051和第二旋转件1052位于前侧,先对地面进行预清洁,旋拖件位于后侧对地面进行深度清洁,且补偿清洁第一旋转件1051和第二旋转件1052无法清洁到的区域,实现可清洁区域覆盖面积大。
[0065]
为了取得更好的拖地效果,所述第一旋拖件1061的旋转滚动方向为沿所述拖吸机器人主体1的前侧朝向后侧的方向旋转滚动且与所述拖吸机器人主体1的前进方向相反,此时第一旋拖件1061能够在旋转滚动的过程中将地面的较大垃圾推送到吸尘口102位置,并形成对较大垃圾的向前甩出的效果,较大的垃圾能及时被吸尘口102吸取到垃圾盒101内;所述第二旋拖件1062的旋转滚动方向为沿所述拖吸机器人主体1的后侧朝向前侧的方向旋转滚动且与所述拖吸机器人主体1的前进方向相同,此时第二旋拖件1062对地面的垃圾向后进行刮擦切削,与第一旋拖件1061结合相处对地面垃圾的预先清洁处理和深度清洁处理,实现更好的拖地清洁效果。
[0066]
为了能实现将第一旋拖件1061和第二旋拖件1062上吸附的垃圾脱离到地面被吸
尘口102吸取到垃圾盒101内,本方案可以设置所述第一旋拖件1061和第二旋拖件1062之间至少设置为相互接触干涉的结构使得所述第一旋拖件1061和第二旋拖件1062的外表面至少相互接触干涉形成刮擦;如图7所示,第一旋拖件1061与第二旋拖件1062在旋转滚动的同时彼此接触形成对彼此外表面的刮擦效果,能将其外表面上吸附的垃圾刮擦脱离到地面上,进而方便被吸尘口102吸取,通过能提升第一旋拖件1061和第二旋拖件1062的藏污能力,不会在较短的时间内因表面吸附较多的垃圾而出现拖地越拖越脏的问题,可以延长第一旋拖件1061和第二旋拖件1062的拖地清洁时间,同时能取得更好的拖地清洁效果。
[0067]
本方案在实现第一清洁件105和第二清洁件106前后分步多次拖地清洁的效果下,还可以实现分步来预先清洁和深度清洁,主要通过第一清洁件105预先清洁处理地面垃圾,第二清洁件106深度清洁地面的顽固垃圾污渍;主要为所述第二清洁件106与地面相互接触时其接触的部分形成一平面结构的压接变形高度大于所述第一清洁件105与地面相互接触时其接触的部分形成一平面结构的压接变形高度,实现第二清洁件106相对第一清洁件105来说对地面的压力更大,压接时候的变形高度也更大,进而实现深度拖地清洁效果,同时不会影响拖吸机器人的正常行走。如果第一清洁件105对地面的压力过大此时会影响拖吸机器人的正常行走,主要为第一清洁件105在驱动轮107的前侧,容易出现驱动轮107打滑或方向偏移或行走不同步的问题,因此设置第二清洁件106相对第一清洁件105对地面的压力更大,此时因第二清洁件106位于驱动轮107的后侧则可以实现驱动轮107正常带动第二清洁件106随拖吸机器人正常行走,不会因第二清洁件106对地面压力大而形成打滑或方向偏移或行走不同步的问题。
[0068]
具体地结构为,如图8所示,当拖吸机器人未放置地面上时,此时第一清洁件105的高度为h1,第二清洁件106的高度为h2,此时第一清洁件105和第二清洁件106处于自然状态下,即为两者在竖直方向上的自然高度。当拖吸机器人位于地面上进行拖地清洁时,此时在拖吸机器人自身重力的作用下或者其运动旋转力的作用下来向下压接第一清洁件105和第二清洁件106,第一清洁件105和第二清洁件106压接并贴合地面形成压接变形高度;如图9所示,此时第一清洁件105贴合压接在地面上使得第一清洁件105的高度为h1
′
,则第一清洁件105的压接变形高度为h1-h1
′
,此时第二清洁件106贴合压接在地面上使得第二清洁件106的高度为h2
′
,则第二清洁件106的压接变形高度为h2-h2
′
,同时确保h2-h2
′
大于h1-h1
′
,使得第二清洁件106对地面的压接变形高度大则会形成更大的压力,在第一清洁件105和第二清洁件106旋转进行拖地清洁的过程中能实现第二清洁件106进行深度清洁效果,有利于去除地面的顽固残留污渍和垃圾;并同时实现分步拖地清洁效果,有利于提升拖地清洁的效率。
[0069]
为了实现h2-h2
′
大于h1-h1
′
,可以通过第一清洁件105和第二清洁件106在竖直方向上的安装高度不同,或者第一清洁件105和第二清洁件106的硬度不同即为被压接的容易度不同,或者设定拖吸机器人的重心位于中心偏后侧的某个位置上,使得第二清洁件106能向下更大的压力来深度清洁地面。
[0070]
可选地,第一清洁件105和第二清洁件106的外侧均设置有拖布,拖布用于接触地面进行拖地清洁,其中,第一清洁件105的拖布硬度大于第二清洁件106的拖布硬度,实现第一清洁件105对地面进行更好的刮擦效果和聚集垃圾到吸尘口102的效果,可以对大垃圾进行预先处理,第一清洁件105的拖布相对较硬会不容易粘附垃圾,而更容易对地面的垃圾进
行刮擦带动至吸尘口102;第二清洁件106的拖布硬度相对较软,此时可以更好的压接贴合地面来进行吸附较小的垃圾和灰尘,进而实现深度清洁的效果。
[0071]
为了实现第一旋转件1051、第二旋转件1052起到对地面垃圾的旋铲效果同时起到将地面的垃圾推送到吸尘口102位置,本方案可以设置第一旋转件1051、第二旋转件1052的外侧部设置为向外扩张的结构,主要为外侧部相对第一旋转件1051、第二旋转件1052的轴心向外倾斜呈一角度,同时外侧部朝向第一旋转件1051和第二旋转件1052的水平旋转方向倾斜呈一角度;使得第一旋转件1051、第二旋转件1052在水平旋转的过程中向外起到旋铲地面垃圾的作用,同时向水平旋转的方向起到刮擦并带动地面垃圾聚集朝向吸尘口102位置,进而将地面的垃圾聚集到拖吸机器人主体1的中部对应的地面区域位置,即为吸尘口102对应的地面区域位置,方便吸尘口102将垃圾吸取到垃圾盒101内进行收集。
[0072]
可选地,所述第一旋转件1051、第二旋转件1052的外侧部包绕有软性结构的硅胶件,硅胶件呈环状或片状结构,能对地面起到更好的旋铲效果。
[0073]
本方案还设置第一清洁件105和第二清洁件106为可以相对地面浮动的结构,拖吸机器人主体1内设置电机,电机连接驱动模块,驱动模块可以用于带动第一清洁件105和第二清洁件106进旋转运动,其中,在第一清洁件105和第二清洁件106的上部设置压壳,压壳与驱动模块可活动的连接,主要通过活动轴连接实现可活动地带动旋转结构;还可以在压壳与驱动模块之间设置弹簧,通过弹簧实现驱动模块与压壳之间的浮动,进而实现压壳带动第一清洁件105和第二清洁件106的上下浮动结构,有利于提升拖吸机器人的行走越障,同时使得第一清洁件105和第二清洁件106对地面能保持一定的浮动压力,有利于提升拖地清洁效果。
[0074]
为了保持第一清洁件105和第二清洁能长时间处于湿润的状态,本方案在所述拖吸机器人主体1内设置有储水箱103,所述储水箱103连接安装有出水器104,所述出水器104设置为同步或交替向所述第一清洁件105、第二清洁件106供水的结构;出水器104与储水箱103内连通,出水器104通过分水器及管道分别连接到第一清洁件105和第二清洁件106的上方,可以实现对第一清洁件105和第二清洁件106进行供水来湿润进行拖地清洁;其中,出水器104可以同时向第一清洁件105和第二清洁件106进行供水,也可以交替地向第一清洁件105和第二清洁件106进行供水,可以根据需要来具体设定,同时出水器104的数量可以为一个或者多个;只需要满足储水箱103内的水被供应到第一清洁件105和第二清洁件106上即可,进而实现对地面的湿润拖地清洁。
[0075]
可选地,出水器104设置为水泵或电磁泵,可控制储水箱103是否出水,以及出水的速度和时间。
[0076]
为了实现对第一清洁件105和第二清洁件106的自动清洗,解决人工手动拆卸进行清洗的问题,本方案的拖吸机器人还包括清洗座2,拖吸机器人可以放置到清洗座2上然后对第一清洁件105和第二清洁件106进行自动清洗,利用第一清洁件105和第二清洁件106的自身运动来实现清洗;所述清洗座2相对所述拖吸机器人主体1设置为独立的结构,拖吸机器人离开清洗座2可以位于地面上行走来进行吸尘清洁和拖地清洁,当第一清洁件105和第二清洁件106需要清洗时,此时用户将拖吸机器人放置到清洗座2上即可,所述清洗座2上设置有放置所述第一清洁件105和/或第二清洁件106的清洗槽201,用户可以向清洗槽201进行加水来清洗第一清洁件105和第二清洁件106,所述清洗槽201至少包覆所述第一清洁件
105和/或第二清洁件106的侧部的一部分并形成相对密闭的结构;因第一清洁件105和第二清洁件106在清洗槽201内进行旋转清洗时会出现搅动水位和甩水的问题,此时设置清洗槽201包覆第一清洗件或第二清洗件的侧部实现一定的挡水效果,防止清洗槽201内的水向外溢出,并使得清洗槽201与第一清洁件105或第二清洁件106之间形成相对密闭的结构,防止因第一清洁件105或第二清洁件106的运动导致清洗槽201内的水向外甩出,并能因水位的搅动形成对第一清洁件105和第二清洁件106的冲淋效果,水位搅动使得水在相对密闭的清洗槽201内翻涌形成冲淋效果,能够起到更好的清洗效果。
[0077]
为了取得更好的清洗效果,本方案设置当所述第一清洁件105或第二清洁件106在位于地面上进行拖地清洁时的旋转方向与当所述第一清洁件105或第二清洁件106在位于所述清洗槽201内被所述清洗槽201内的水淹没进行清洗时的旋转方向至少包括相反;如图11、13所示,第一清洁件105或第二清洁件106在拖地清洁的过程中因沿同一方向进行与地面接触进行运动来清洁,导致其表面与地面接触被压接形成压膜,此时在形成压膜的情况下拖地清洁效果较差,需要对其进行清洗,通过设置第一清洁件105或第二清洁件106在位于清洗槽201内进行清洗时的运动旋转方向与在位于地面上进行拖地清洁件时的运动旋转方向相反可以实现第一清洁件105或第二清洁件106在清洗槽201内进行清洗的过程中使得压膜被破坏从而使得压膜消失,完成对第一清洁件105和第二清洁件106的自动清洗,且清洗效果好,能对第一清洁件105和第二清洁件106进行深层次的清洗,其内的脏污和垃圾能更好地被清洗出。
[0078]
具体地,第一清洁件105和第二清洁件106的外部设置植毛层,植毛层设置为软性结构。
[0079]
为了实现第一清洁件105和第二清洁件106在清洗完成后能更快速的实现甩水进行甩干的效果,本方案还可以设置当所述第一清洁件105或第二清洁件106的一部分被所述清洗槽201内的水淹没进行清洗时所述第一清洁件105或第二清洁件106的旋转方向与当所述第一清洁件105或第二清洁件106与所述清洗槽201内的水分离进行甩干时所述第一清洁件105或第二清洁件106的旋转方向至少包括相反;如图12所示,当第一清洁件105或第二清洁件106在沿同一方向进行清洗时,此时清洗槽201内的水将其表面冲淋打破压膜,水充分进入到其内部,清洗完成后,用户可以倾倒掉清洗槽201内的污水,然后将拖吸机器人放置在清洗座2内进行甩干,此时设置清洗时的旋转方向与甩干的旋转方向相反有利于将其内的污水快速的甩出,有利于第一清洁件105和第二清洁件106保持一定的微湿状态。
[0080]
工作原理:本方案通过设置第一清洁件105和第二清洁件106来对面进行拖地清洁,第一清洁件105和第二清洁件106自身设置为可以运动的结构,且拖吸机器人在地面行走时第一清洁件105和第二清洁件106开启运动进行拖地清洁,通过限定第一清洁件105、第二清洁件106的位置来实现增大可拖地清洁的范围面积,确保能实现最大外径宽度上的拖地清洁范围;并通过设置第一清洁件105和第二清洁件106的运动方向来实现在拖地清洁下不影响拖吸机器人行走,进而提升拖地清洁的效果、效率。
[0081]
本领域的普通技术人员可以理解,上述各实施方式是实现本实用新型的具体实施例,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本实用新型的精神和范围,均在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1