一种清洁系统的制作方法
1.本实用新型属于扫地机技术领域,尤其涉及一种清洁系统。
背景技术:
2.扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一种,目前应用广泛。
3.现有的扫地机器人,其主要工作过程为:扫地机器人在地面上移动,将地面尘土等杂物吸纳进入自身的尘盒,从而完成地面清理的功能。为了减少用户经常清洁扫地机器人尘盒的次数,现有在充电座上设置了集尘充电系统。将扫地机尘盒内的灰尘集中到充电座的集尘装置中,经过多次收集灰尘后,再将扫地机尘盒进行清洁。
4.然而,现有市面上配备有集尘功能的扫地机器人,由于所设置的集尘系统,使得其体积较大,很大程度的占用用户的使用空间,同时其仅配备有集尘功能,又使得在体积大的情况下功能性不足。
技术实现要素:
5.本实用新型实施例的目的在于提供一种清洁系统,旨在解决现有扫地机功能性不足的问题。
6.本实用新型实施例是这样实现的,一种清洁系统,包括:
7.扫地机器人;及
8.可用作垃圾桶的集尘充电座;
9.所述集尘充电座包括开合式的集尘充电组件、可分离的集尘组件、及导流组件;
10.所述集尘充电座与所述扫地机器人有接触式充电以及真空集尘;
11.所述集尘组件设置于所述集尘充电组件内,用于收集垃圾;
12.所述扫地机器人回到所述集尘充电座时,所述导流组件分别连通所述扫地机器人及所述集尘组件,用于将所述扫地机器人内的垃圾导流至所述集尘组件内;
13.所述集尘充电座处于打开状态时,所述集尘组件可由所述集尘充电组件内取出。
14.更进一步的,所述导流组件包括导流管、风机以及过滤棉,所述导流管一端与所述扫地机器人的尘盒口相连通,所述导流管另一端与所述集尘组件相连通,所述风机的风机口与所述集尘组件相连通。
15.更进一步的,所述集尘组件包括集尘箱、及设于所述集尘箱顶端与所述集尘箱转动连接的提手;
16.所述集尘箱与所述导流管相对应的位置设有集尘口,所述集尘口设在所述集尘箱的中上部位,所述集尘箱与所述风机的风机口相对应位置设有过滤口,所述过滤口设有所述过滤棉。
17.更进一步的,所述集尘充电组件包括壳体、设于所述壳体顶端与所述壳体转动连接的上盖、以及设于所述上盖上的第一传感器;
18.所述壳体下端设有容置所述扫地机器人的容置空间,所述集尘组件可分离的设置于所述壳体的内腔;
19.所述第一传感器用于检测所述上盖的上端是否存在人体或物体,并当所述第一传感器检测到所述上盖的上端存在人体或物体时,所述集尘充电组件上的上盖才能进行打开。
20.更进一步的,所述扫地机器人上设有多组用于测距定位的定位装置。
21.更进一步的,所述壳体所设置的容置空间的体积大于所述扫地机器人的体积,所述扫地机器人与所述集尘充电座电连接时,所述扫地机器人完全容置于所述壳体的容置空间内。
22.更进一步的,所述壳体下端与所述扫地机器人相抵触的底面与地面之间呈一定的夹角。
23.更进一步的,所述过滤口由连续阵列分布的多个格栅口组成。
24.更进一步的,所述集尘充电座与所述扫地机器人进行真空集尘工作时,所述集尘充电组件的上盖无法打开,直至真空集尘停止后恢复所述上盖的打开。
25.更进一步的,所述集尘充电座中设有第二传感器,用于检测所述集尘组件是否在位,当所述第二传感器检测到所述集尘组件不在位,所述集尘充电座无法进行真空集尘工作。
26.本实用新型实施例提供的清洁系统,由于设置的与扫地机器人有接触式充电的集尘充电座,使得扫地机器人移动回集尘充电座时既可实现回充又可实现集尘处理,通过集尘充电座中设置的集尘充电组件使得可对扫地机器人进行充电处理,同时当扫地机器人不需要集尘工作时,可打开集尘充电组件中的上盖,使得可将集尘充电座充当垃圾桶使用,此时可将垃圾倒入设置于集尘充电组件内的集尘组件中,同时通过设置的集尘组件和导流组件,使得当扫地机器人移动回集尘充电座进行集尘工作时,其导流组件可将扫地机器人内的垃圾导流至集尘组件内进行垃圾收集处理,使得可实现集尘充电座的多种功能的使用,使得很好的解决了现有扫地机功能性不足的问题。
附图说明
27.图1是本实用新型一实施例提供的清洁系统的结构示意图;
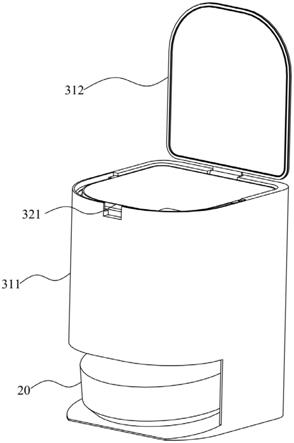
28.图2是本实用新型一实施例提供的清洁系统中上盖打开状态的结构示意图;
29.图3是本实用新型一实施例提供的清洁系统中集尘组件取出状态的结构示意图;
30.图4是本实用新型一实施例提供的清洁系统在第一视角下的剖面结构示意图;
31.图5是本实用新型一实施例提供的清洁系统在第二视角下的剖面结构示意图;
32.图6是本实用新型一实施例提供的清洁系统在第三视角下的剖面结构示意图;
33.图7是本实用新型一实施例提供的清洁系统在第四视角下的爆炸结构示意图;
34.图8是本实用新型一实施例提供的清洁系统在第五视角下的爆炸结构示意图;
35.图9是本实用新型一实施例提供的清洁系统在第六视角下的剖面结构示意图。
具体实施方式
36.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施
例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
37.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
38.本实用新型通过设置的集尘充电座,使得扫地机器人移动回集尘充电座时既可实现回充又可实现集尘处理,同时通过集尘充电座上通过设置的集尘充电组件、集尘组件和导流组件,使得当扫地机器人需要进行集尘工作时,其导流组件可将扫地机器人内的垃圾导流至集尘组件内进行垃圾收集处理,当扫地机器人不需要集尘工作时,通过打开集尘充电组件的上盖,使得可充当垃圾桶使用,且集尘组件装满时,可将集尘组件取出倾倒垃圾处理,使得可实现集尘充电座的多种功能的使用,使得很好的解决了现有扫地机功能性不足的问题。
39.实施例一
40.请参阅图1至图9,是本实用新型实施例提供的清洁系统的结构示意图,为了便于说明,仅示出了与本实用新型实施例相关的部分,本实用新型实施例提供的清洁系统包括:
41.扫地机器人20;及
42.可用作垃圾桶的集尘充电座30;
43.其中,集尘充电座30包括开合式的集尘充电组件31、可分离的集尘组件32、及导流组件33;
44.集尘充电座30与扫地机器人20有接触式充电以及真空集尘;
45.集尘组件32设置于集尘充电组件31内,用于收集处理垃圾;
46.扫地机器人20回到集尘充电座30时,导流组件33分别连通扫地机器人20及集尘组件32,用于将扫地机器人20内的垃圾导流至集尘组件32内;
47.集尘充电座30处于打开状态时,集尘组件32可由集尘充电组件31内取出。
48.其中,在本实用新型的一个实施例中,该扫地机器人20采用如现有技术中所述的扫地机器人20,在此对于本实施例中未涉及本技术发明点而未具体指明之处,可详细参照现有扫地机器人20。其中,该扫地机器人20上设有充电接口(图未示),其与相对应的集尘充电座30进行电连接,且通过集尘充电座30进行充电,本实施例中,其充电接口设置于自身底部,当扫地机器人20移动回集尘充电座30的固定位置进行回充时,其扫地机器人20的充电接口与集尘充电座30所对应设置的充电接口通过金属触点相接触,使得扫地机器人20与集尘充电座30电连接。可以理解的,在本实用新型的其他实施例中,其扫地机器人20的充电接口还可设置为其他位置,其满足在移动回集尘充电座30时,与集尘充电座30对应设置的充电接口相接触且电连接的要求即可,在此不做具体限定。同时需要指出的是,本实施例中,其扫地机器人20上的充电接口并未在说明书附图中画出,其并非本技术的发明点,因此具体实施时可相应参照现有技术,在此不做具体限定。
49.进一步地,扫地机器人20的上设有多组用于测距定位的定位装置21,具体的,在本
实施例中,如图8及图9所示,其扫地机器人20在靠近导流组件33的后端侧壁上设有一组定位装置21,其扫地机器人20在侧壁的左右任意一端上设有一组定位装置21,其中设于后端的定位装置21用于对准移动回集尘充电座30时的前进方向,而设于侧端的定位装置21用于测量与集尘充电座30内的沿墙距离,以使控制扫地机器人20与集尘充电座30内的沿墙之间的距离保持不变,此时通过扫地机器人20上设置的两组定位装置21可实现扫地机器人20移动回集尘充电座30进行回充时的精准定位,使得扫地机器人20与集尘充电座30之间电连接,且此时扫地机器人20上的尘盒口与集尘充电座30上的导流组件33相连通。具体实施时,本实施例中,其定位装置21采用红外装置。可以理解的,在本实用新型的其他实施例中,其定位装置21还可采用激光定位系统、图像位移定位系统、无线载波定位系统中的任意一种或多种的组合,在此不做限定。
50.进一步地,在本实用新型的一个实施例中,集尘充电组件31包括壳体311、设于壳体311顶端与壳体311转动连接可自由开合的上盖312,以及设于上盖312上的第一传感器(图未示);且集尘充电组件31与扫地机器人20可接触式电连接。
51.壳体311下端设有容置扫地机器人20的容置空间,集尘组件32可分离的设置于壳体311的内腔;
52.第一传感器用于检测上盖312的上端是否存在人体或物体,并当第一传感器检测到上盖312的上端存在人体或物体时,集尘充电组件31上的上盖312才能进行打开。
53.其中,参照图1
‑
8所示,在本实施例中,其壳体311的顶端设置有可自由开合的上盖312,其集尘组件32容置于该壳体311的上端位置,使得该集尘充电座30集尘完毕需要垃圾清理时,用户可通过打开集尘充电组件31的上盖312而可将容置于集尘充电组件31内的集尘组件32取出,并进行相应的垃圾清理。
54.进一步地,参照图4、图5所示,壳体311所设置的容置空间的体积大于扫地机器人20的体积,扫地机器人20与集尘充电座30电连接时,扫地机器人20完全容置于壳体311的容置空间内。使得扫地机器人20在集尘或者充电时,不会露出,避免受到外部的干扰产生的移动而导致充电失效或集尘失效的问题。
55.进一步地,参照图4、图5所示,壳体311下端与扫地机器人20相抵触的底面与地面之间呈一定的夹角。使得可降低由于导流组件33的设置而使得所需垫高壳体311底部高度,避免了由于壳体311底部高度过高所导致扫地机器人20无法移动回壳体311的容置空间内的问题,使得扫地机器人20可在壳体311的底面进行平稳爬坡,并在不影响扫地机器人20爬坡的情况下实现扫地机底部的尘盒口可与导流组件33进行精准对接,其如图5所示。
56.进一步地,在本实用新型的一个实施例中,该导流组件33包括导流管331、风机332以及过滤棉(图未示),导流管331一端与扫地机器人20的尘盒口相连通,导流管331另一端与集尘组件32相连通,风机332的风机口与集尘组件32相连通。
57.进一步地,在本实用新型的一个实施例中,集尘组件32包括集尘箱321、及设于集尘箱321顶端与集尘箱321转动连接的提手322;
58.其中,集尘箱321与导流管331相对应的位置设有集尘口323,集尘口323设在集尘箱321的中上部位,集尘箱321与风机332的风机口相对应位置设有过滤口324,过滤口324设有过滤棉。
59.其中,参照图7及图8所示,在本实施例中,其导流管331大体呈l型,其分别抵靠至
壳体311的后端内壁以及底部内壁,其中,集尘箱321靠近导流组件33的侧面由上至下依次沿靠近中心方向连续弯折,导流组件33容置于集尘箱321连续弯折所形成的避让空间中,集尘口323设于集尘箱321的弯折处。
60.其中,如图4所示,其集尘箱321由于连续弯折设置,使得集尘箱321的连续弯折的下端位置与壳体311的内壁之间形成有容置该导流组件33中的导流管331及风机332的避让空间,同时其集尘口323设于集尘箱321的弯折位置,也即与集尘箱321底壁大体平行的位置,其中过滤口324设于集尘箱321的弯折处以及连续弯折处,且过滤口324由连续阵列分布的多个格栅口组成。其中,该集尘箱321的弯折位置设于较上部位置,其用于当导流组件33工作时将扫地机器人20内部的垃圾从导流管331吸入,并由该集尘口323处通过自身重力而掉落至集尘箱321底部进行存储,避免由于集尘口323设于底端位置而使得所收集的垃圾又从集尘口323处流出。其中,该过滤口324由连续阵列分布的多个格栅口组成,使得可避免流入至集尘箱321内的体积较大的垃圾又从过滤口324处流出。
61.其中,集尘充电座30与扫地机器人20进行真空集尘工作时,集尘充电组件31的上盖312无法打开,直至真空集尘停止后恢复上盖312的打开。同时集尘充电座30中设有第二传感器(图未示),用于检测集尘组件32是否在位,当第二传感器检测到集尘组件32不在位,集尘充电座30无法进行真空集尘工作。
62.具体使用时,当扫地机器人20移动回集尘充电座30精准对位后进行回充以及真空集尘工作时,其集尘充电组件31上的上盖312关闭密封,此时其集尘充电座30上的第二传感器检测集尘组件31是否在位,当检测不在位时,则集尘充电座30无法进行真空集尘工作;当检测在位时,此时由于导流组件33中的导流管331一端与集尘组件32的集尘口323连接,另一端与扫地机器人20的尘盒口连接,同时风机332的风机口与集尘组件32的过滤口324连接,且过滤口324设有过滤棉,使得集尘箱321、风机332、导流管331、及扫地机器人20的尘盒相互连接形成一个密封空间,当风机332进行工作时,其整个系统产生真空负压,其如图5所示,因此扫地机器人20的尘盒内垃圾通过导流管331被吸进集尘箱321内,其由集尘箱321上的集尘口323处流出的垃圾因重量而掉入集尘箱321底部,剩余气体通过过滤口324过滤流出。使得其集尘充电座30既可实现对扫地机器人20的充电,又可将扫地机器人20的尘盒内垃圾进行收集处理。同时此时在真空集尘工作时,其上盖312无法打开,当真空集尘完毕后,集尘充电组件31恢复其上盖312的打开,此时集尘充电组件31上的第一传感器恢复检测上盖312的上端是否存在人体或物体,并当第一传感器检测到上盖312的上端存在人体或物体时,集尘充电组件31上的上盖312才能进行打开。
63.当扫地机器人20不进行集尘工作时,此时集尘充电组件31上的上盖312可由用户感应至第一传感器进行打开,此时人手在集尘充电座30上方时,上盖312打开,用于收集容纳垃圾,其如图2所示。此时集尘充电座30可充当垃圾桶使用,当集尘箱321装满后,用户还可打开上盖312,从把手处提取出集尘箱321,此时如图3所示,其用户可将集尘组件32单独取出去倒垃圾,然后用水清洗晒干后,继续放入至集尘充电组件31内进行使用。
64.本实施例中,由于设置的与扫地机器人有接触式充电的集尘充电座,使得扫地机器人移动回集尘充电座时既可实现回充又可实现集尘处理,通过集尘充电座中设置的集尘充电组件使得可对扫地机器人进行充电处理,同时当扫地机器人不需要集尘工作时,可打开集尘充电组件中的上盖,使得可将集尘充电座充当垃圾桶使用,此时可将垃圾倒入设置
于集尘充电组件内的集尘组件中,同时通过设置的集尘组件和导流组件,使得当扫地机器人移动回集尘充电座进行集尘工作时,其导流组件可将扫地机器人内的垃圾导流至集尘组件内进行垃圾收集处理,使得可实现集尘充电座的多种功能的使用,使得很好的解决了现有扫地机功能性不足的问题;同时由于集尘充电座所设置的容置空间的体积大于扫地机器人的体积,使得扫地机器人可完全容纳至该容置空间内,使得扫地机器人在集尘或者充电时,不会露出,避免受到外部的干扰;同时由于扫地机器人上所设置的多种定位装置,使得扫地机器人移动回集尘充电座进行回充时实现精准定位以及扫地机器人的尘盒口与导流管之间的精准对接。
65.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1