一种基座及扫地机器人清洁系统的制作方法
1.本实用新型涉及扫地机器人技术领域,具体涉及一种基座及扫地机器人清洁系统。
背景技术:
2.随着科技的发展和社会的进步,人们越来越倾向于采用扫地机器人代替人工完成地面清洁工作,市面上出现越来越多的扫地机器人具有扫地和拖地的功能,即扫地机器人既可以实现地面垃圾的清扫,且可以在完成清扫后进行拖地工作,以实现扫地和拖地的清洁工作。
3.现有技术中,扫地机器人通常包括机器人本体以及可拆卸连接于机器人本体的拖布组件,而现有的扫地机器人需要进行扫地和拖地功能的切换时,需要人工将拖布组件进行拆卸或安装,而人工拆装拖布组件过程繁琐,不便用户使用。
技术实现要素:
4.本实用新型提供一种基座,旨在解决现有技术中存在需要人工拆卸或安装扫地机器人的拖布组件,不便用户使用的问题。
5.本实用新型是这样实现的,提供一种基座,所述基座用于与扫地机器人配合使用,所述扫地机器人设有与机器人本体通过锁扣机构形成可拆卸连接的拖布组件,所述基座包括:
6.座体;
7.设于所述座体上的拆装布机构,所述拆装布机构可驱动所述锁扣机构解锁并与所述拖布组件相固定以使所述拖布组件与所述机器人本体拆卸,且所述拆装布机构可驱动所述锁扣机构锁定并与所述拖布组件脱离以使所述拖布组件安装于所述机器人本体;
8.与所述拆装布机构电连接的第一控制单元,用于控制所述拆装布机构对所述锁扣机构解锁或锁定。
9.优选的,所述拆装布机构包括:
10.设于所述座体上的驱动装置,所述驱动装置与所述第一控制单元电连接;
11.活动设置于所述座体上的滑块,所述驱动装置可驱动所述滑块对所述锁扣机构解锁或锁定。
12.优选的,所述拆装布机构还包括:
13.与所述驱动装置传动连接的驱动件,所述驱动装置可带动所述驱动件驱动所述滑块对所述锁扣机构解锁;以及
14.连接所述滑块与所述座体的弹性件,所述驱动装置可带动所述驱动件与所述滑块分离以使所述弹性件驱动所述滑块带动所述锁扣机构锁定。
15.优选的,所述基座还包括:
16.设于所述座体的清洁刷,所述驱动装置可带动所述清洁刷相对所述拖布组件来回
运动。
17.优选的,所述拆装布机构还包括:
18.与所述驱动装置连接的传动组件,所述清洁刷固定于所述传动组件上,所述驱动件设置于所述传动组件或所述清洁刷上。
19.优选的,所述驱动件设置于所述清洁刷上,所述传动组件可带动所述清洁刷在第一位置与第二位置之间运动以清洗所述拖布组件,且所述传动组件可带动所述清洁刷运动到第三位置以使所述驱动件驱动所述滑块对所述锁扣机构解锁。
20.优选的,所述座体上设有与所述拖布组件边缘的导向凹槽配合的伸出壁,所述伸出壁嵌入所述导向凹槽以支撑所述拖布组件。
21.本实用新型还提供一种扫地机器人清洁系统,包括扫地机器人、以及上述的基座,所述扫地机器人包括:
22.机器人本体,所述机器人本体设有行走机构、以及与所述行走机构电连接的第二控制单元;以及
23.拖布组件,所述拖布组件与所述机器人本体通过锁扣机构形成可拆卸连接。
24.优选的,所述锁扣机构包括:
25.设于所述机器人本体上的卡扣件;
26.设于所述拖布组件上并与所述卡扣件相扣合的按键;以及
27.连接所述拖布组件和所述按键的复位弹簧;
28.所述拆装布机构可驱动所述按键与所述卡扣件脱离或扣合。
29.优选的,所述拖布组件上设有与所述卡扣件配合的滑槽,所述卡扣件卡入所述滑槽内。
30.本实用新型提供的基座通过设置拆装布机构,扫地机器人的拖布组件通过锁扣机构与机器人本体形成可拆卸连接,利用第一控制单元控制拆装布机构驱动锁扣机构解锁并与拖布组件相固定以使拖布组件与机器人本体拆卸,并利用第一控制单元控制拆装布机构驱动锁扣机构锁定并与拖布组件脱离以使拖布组件安装固定于机器人本体,从而基座可以实现扫地机器人的拖布组件自动拆卸和自动安装。本实用新型提供的扫地机器人清洁系统通过基座与扫地机器人的配合可以实现扫地机器人的拖布组件自动拆卸或安装,方便扫地机器人进行扫地和拖地功能的切换,无需人工拆卸或安装拖布组件,大大方便了用户使用,提升用户使用体验。
附图说明
31.图1为本实用新型实施例提供的扫地机器人清洁系统的结构示意图;
32.图2为本实用新型实施例提供的扫地机器人清洁系统的立体结构分解图;
33.图3为本实用新型实施例提供的扫地机器人的立体结构示意图;
34.图4为本实用新型实施例提供的扫地机器人的结构示意图;
35.图5为沿图4中a
‑
a方向的剖面结构示意图;
36.图6为图5中局部b的放大图;
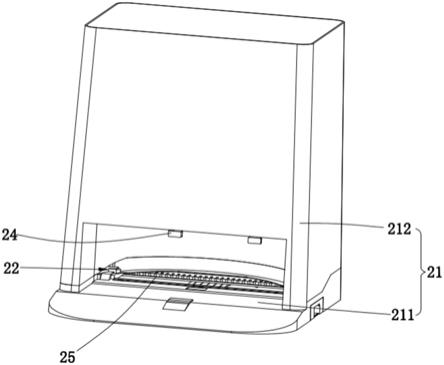
37.图7为本实用新型实施例提供的基座的结构示意图;
38.图8为本实用新型实施例提供的基座的立体结构分解图;
39.图9为本实用新型实施例提供的基座的部分结构示意图;
40.图10为本实用新型实施例提供的基座的另一部分结构示意图;
41.图11为图10中局部c的放大图;
42.图12为本实用新型实施例提供的基座与拖布组件配合时的结构示意图;
43.图13为图12中局部d的放大图。
具体实施方式
44.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
45.本实用新型实施例提供的扫地机器人清洁系统通过在基座上设置拆装布机构,扫地机器人的拖布组件通过锁扣机构与机器人本体形成可拆卸连接,利用拆装布机构驱动锁扣机构解锁或锁定,通过基座与扫地机器人的配合可以实现扫地机器人的拖布组件自动拆卸或安装,方便扫地机器人进行扫地和拖地功能的切换,无需人工拆卸或安装拖布组件,大大方便了用户使用,提升用户使用体验。
46.请参照图1
‑
图2,本实用新型实施例提供一种扫地机器人清洁系统,包括扫地机器人1以及基座2。
47.请参照图3
‑
图6,扫地机器人1包括机器人本体11,机器人本体11设有行走机构、以及与行走机构电连接的第二控制单元(图未示);以及
48.拖布组件12,拖布组件12与机器人本体11通过锁扣机构13形成可拆卸连接。
49.本实用新型实施例中,行走机构包括设置于机器人本体11下方的行走轮1112、以及与行走轮1112传动连接的电机(图未示),电机与第二控制单元电连接,第二控制单元通过控制电机工作,电机带动行走轮1112转动,从而实现扫地机器人1的行走。
50.本实用新型实施例中,机器人本体11上还设有用于供扫地机器人1充电的机器人电极片114,扫地机器人1利用机器人电极片114与基座2对接实现充电。
51.本实用新型实施例中,当拖布组件12安装在扫地机器人1时,锁扣机构13处于锁定状态,从而使拖布组件12与机器人本体11锁定固定于一体;当拖布组件12从扫地机器人1拆卸时,锁扣机构13处于解锁状态,从而拖布组件12可以从机器人本体11拆卸下来。
52.请参照5和图6,作为本实用新型的一个实施例,锁扣机构13包括设于机器人本体11上的卡扣件131、活动设于拖布组件12上并与卡扣件131相扣合的按键132、以及连接拖布组件12与按键132的复位弹簧133。
53.本实施例中,卡扣件131上设有一扣台1311,按键132设有一卡勾1321,当按键132的卡勾1321和卡扣件131的扣台1311相互扣合时,实现锁扣机构13的锁定,使拖布组件12和机器人本体11相互固定;当按键132的卡勾1321和卡扣件131的扣台1311相互脱离时,实现锁扣机构13的解锁,使拖布组件12可以与机器人本体11脱离。
54.当按键132受外力按压时,按键132向拖布支架121的中心方向运动,按键132不断压缩复位弹簧133,直到按键132与卡扣件131脱扣,从而实现锁扣机构13的解锁,此时拖布组件12与机器人本体11处于解锁状态。当按键132不受外力按压时,按键132在复位弹簧133的作用下复位,直到按键132的卡勾1321和卡扣件131的扣台1311重新扣合,实现锁扣机构
13的重新锁定,此时拖布组件12与机器人本体11处于锁定状态,从而实现拖布组件12与机器人本体11的重新安装固定。
55.本实施例中,通过将锁扣机构13设置成包括卡扣件131、按键132以及复位弹簧133,利用按键132的按压实现锁扣机构13的解扣,且利用复位弹簧133带动按键132和卡扣件131重新扣合,可以实现锁扣机构13的锁定,从而使锁扣机构13的解锁或锁定操作简单方便,便于拖布组件12与机器人本体11的自动拆卸和安装,且也方便用户手动按压按键132实现拖布组件12与机器人本体11拆卸或安装。
56.作为本实用新型的一个实施例,拖布组件12包括拖布支架121以及固定于拖布支架121下方的拖布122;拖布支架121设有安装孔1211,按键132活动安装于安装孔1211内,复位弹簧133一端与按键132抵接,复位弹簧133的另一端与拖布支架121抵接。
57.本实施例中,按键132设有一个导向柱1322,复位弹簧133一端套设于导向柱1322,另一端与拖布支架121形成抵接。利用导向柱1322对复位弹簧133进行导向限位,避免复位弹簧133弯曲,且便于复位弹簧133的固定安装。
58.作为本实用新型的一个实施例,拖布组件12上设有与卡扣件131配合的滑槽1213,卡扣件131卡入滑槽1213。具体的,滑槽1213开设于拖布支架121。一方面,利用卡扣件131和滑槽1213的配合,实现拖布组件12左右方向的限位,防止拖布组件12沿左右移动;另一方面,利用卡扣件131和按键132相扣合,实现拖布组件12前后方向的限位,防止拖布组件12前后方向移动,从而可以将拖布组件12稳定固定在机器人本体11上。
59.作为本实用新型的一个实施例,拖布组件12的左右两侧分别通过一个锁扣机构13与机器人本体11锁扣固定,使拖布组件12与机器人本体11固定更加可靠。
60.本实施例中,机器人本体11的两侧分别设置一个卡扣件131,拖布组件12的左右两侧分别设置一个滑槽1213、一个按键132及一个复位弹簧133,机器人本体11的每个卡扣件131卡入拖布组件12的对应滑槽1213内,且按键132与卡扣件131形成扣合,使拖布组件12与机器人本体11固定于一体。
61.当两个按键132受外力按压时,两个按键132同时向拖布支架121的中心方向运动并压缩对应的复位弹簧133,直到各按键132与对应的卡扣件131脱扣,从而实现两个锁扣机构13的解锁,此时拖布组件12与机器人本体11处于解锁状态。当两个按键132不受外力按压时,两个按键132在对应的复位弹簧133的作用下复位,使两个按键132的卡勾1321与对应的卡扣件131的扣台1311重新扣合,实现锁扣机构13的重新锁定,此时拖布组件12与机器人本体11处于锁定状态。
62.请参照图7
‑
图11,本实用新型实施例提供的基座2包括:
63.座体21;
64.设于座体21上的拆装布机构22,拆装布机构22可驱动锁扣机构13解锁并与拖布组件12相固定以使拖布组件12与机器人本体11拆卸,且拆装布机构22可驱动锁扣机构13锁定并与拖布组件12脱离以使拖布组件12安装于机器人本体11;
65.与拆装布机构22电连接的第一控制单元(图未示),用于控制拆装布机构22驱动锁扣机构13解锁或锁定。
66.本实用新型实施例中,基座2用于与上述的扫地机器人1配合使用,以实现扫地机器人1的拖布组件12的自动拆卸和安装。
67.本实用新型实施例中,当拆装布机构22驱动锁扣机构13解锁时,拆装布机构22与拖布组件12相固定,使拖布组件12稳定固定在基座2上,防止拖布组件12移位,确保后续拖布组件12可以准确安装到机器人本体11。拆装布机构22驱动锁扣机构13锁定时,拆装布机构22与拖布组件12脱离,使得拖布组件12安装到机器人本体11上并可与机器人本体11同步运动。
68.请结合参照图10
‑
图13,当扫地机器人1需要进行拖布组件12的拆卸时,扫地机器人1的第二控制单元控制行走机构工作,行走机构带动扫地机器人1移动到基座2的座体21上,基座2的第一控制单元控制拆装布机构22工作,拆装布机构22驱动锁扣机构13解锁并与拖布组件12相固定,扫地机器人1的第二控制单元再控制行走机构带动机器人本体11从基座2退出,此时拖布组件12留在基座2的座体21上,即完成扫地机器人1的拖布组件12的自动拆卸。
69.当扫地机器人1需要进行拖布组件12安装时,扫地机器人1的第二控制单元控制行走机构工作,使行走机构带动机器人本体11移动到基座2的座体21上,机器人本体11与座体21上的拖布组件12对位装配完成后,基座2的第一控制单元控制拆装布机构22工作,拆装布机构22驱动锁扣机构13锁定并与拖布组件12脱离,使拖布组件12重新安装在机器人本体11,扫地机器人1的第二控制单元再控制行走机构带动机器人本体11从基座2退出,即完成扫地机器人1拖布的自动安装。因此,扫地机器人1需要进行扫地和拖地功能的切换时,基座2可以利用拆装布机构22实现扫地机器人1的拖布组件12的自动拆卸和安装,无需人工将拖布组件12进行拆卸或安装,大大方便了用户使用,提升用户使用体验。同时,拖布组件12在拆卸时,拆装布机构22驱动锁扣机构13解锁并与拖布组件12相固定,可以防止拖布组件12移位,便于后续拖布组件12与机器人本体11的准确对位安装。
70.作为本实用新型的一个实施例,座体21包括底座211以及固定于底座211上的罩体212,拆装布机构22安装于底座211。其中,底座211和罩体212围成具有开口的一腔体,扫地机器人1移动到基座2时,扫地机器人1可从该开口移动到腔体内部。
71.作为本实用新型的一个实施例,底座211包括底板2111和盖板2112,拆装布机构22安装于底板2111,盖板2112盖设于底板2111上。
72.作为本实用新型的一个实施例,座体21还设有与机器人本体11上的机器人电极片114配合的充电电极片24。其中,充电电极片24设置于罩体212。当机器人本体11上的机器人电极片114与充电电极片24对接时,可以实现扫地机器人1的自动充电,使基座2既具有拖布组件12的自动拆卸和安装功能,且具有扫地机器人1的充电功能。
73.作为本实用新型的一个实施例,拆装布机构22包括:
74.设于座体21上的驱动装置221,驱动装置221与第一控制单元电连接;
75.设于座体21上的滑块222,驱动装置221可驱动滑块222对锁扣机构13解锁或锁定。
76.本实施例中,拆装布机构22可驱动按键132与卡扣件131脱离或扣合。当扫地机器人1由拖地模式切换成扫地模式时,第一控制单元控制驱动装置221驱动滑块222对锁扣机构13解锁,滑块222插入拖布组件12内与拖布组件12固定;当扫地机器人1由扫地模式切换成拖地模式时,第一控制单元控制驱动装置221驱动滑块222对锁扣机构13锁定。
77.具体的,当扫地机器人1由拖地模式切换成扫地模式时,第一控制单元控制驱动装置221带动滑块222向按键132方向运动,滑块222推动按键132往拖布支架121的中部移动,
直到按键132与机器人本体11的卡扣件131脱离,此时解除了按键132与卡扣件131的扣合,且滑块222插入拖布组件12内,扫地机器人1的机器人本体11相对拖布组件12从基座2退出,实现扫地机器人1的拖布组件12的自动拆卸。
78.当扫地机器人1由扫地模式切换成拖地模式时,第一控制单元控制驱动装置221带动滑块222与按键132脱离,滑块222从拖布组件12内退出,按键132在复位弹簧133作用下复位,按键132的卡勾1321和卡扣件131的扣台1311重新扣合,使锁扣机构13的重新锁定,从而实现扫地机器人1的拖布组件12的自动安装。
79.作为本实用新型的一个实施例,拆装布机构22还包括:
80.与驱动装置221传动连接的驱动件223,驱动装置221可带动驱动件223驱动滑块222对锁扣机构13解锁;
81.连接滑块222与座体21的弹性件224,驱动装置221可带动驱动件223与滑块222分离以使弹性件224驱动滑块222带动锁扣机构13锁定。
82.本实用新型实施例中,基座2的两侧分别设有一个滑块222和一个弹性件224,每个滑块222对应设置有一个驱动件223,且每个滑块222与按键132配合设置。
83.本实施例中,当第一控制单元控制驱动装置221带动驱动件223驱动滑块222向按键132方向运动时,滑块222推动按键132往拖布支架121的中部移动,直到按键132与卡扣件131脱离,从而解除按键132与卡扣件131的扣合。当第一控制单元控制驱动装置221带动驱动件223与滑块222分离时,弹性件224带动滑块222向远离按键132方向运动,按键132的卡勾1321和卡扣件131的扣台1311重新扣合,从而实现拖布组件12的机器人本体11自动安装。
84.本实施例中,弹性件224具体为一弹簧。驱动装置221通过驱动件223带动滑块222对锁扣机构13解锁,并利用弹性件224带动滑块222对锁扣机构13进行锁定,使拆装布机构22的结构简单,生产成本低。除本实施例外,也可以直接由驱动装置221带动滑块222推压按键132实现锁扣机构13解锁,且由驱动装置221直接带动滑块222与按键132脱离实现锁扣机构13锁定。
85.本实施例中,驱动装置221为一电机,该电机与第一控制单元电连接。第一控制单元通过控制电机的工作,从而控制拆装布机构22对锁扣机构13解锁或锁定。
86.请结合参照图3和图9,作为本实用新型的一个实施例,基座21上设有与拖布组件12边缘的导向凹槽123配合的伸出壁213,拖布组件12的周侧设有导向凹槽123,伸出壁213嵌入导向凹槽123以支撑拖布组件12。具体的,伸出壁213设于底座211上,导向凹槽123设置于拖布支架121的周侧。
87.本实施例中,当扫地机器人1退回基座2时,伸出壁213嵌入导向凹槽123内以支撑拖布组件12,伸出壁213会限制拖布组件12上下左右运动,使拖布组件12稳定固定在基座2上。
88.作为本实用新型的一个实施例,基座2上还设有与第一控制单元相连的对位开关29。其中,对位开关29可以为触碰开关。当扫地机器人1退回基座2进行拆卸拖布组件12时,基座2的座体21上的对位开关29检测到拖布组件12时,代表扫地机器人1与基座2已经完成对位,便于第一控制单元自动控制拆装布机构22对扫地机器人1的锁扣机构13进行解锁。
89.作为本实用新型的一个实施例,基座2还包括:
90.设于座体21上的清洁刷25,驱动装置221可带动清洁刷25相对拖布组件12来回运
动。其中,基座2还包括水箱(图未示)以及连接水箱和清洁刷25的管路,通过水箱不断向清洁刷25供水,使得清洁刷25上的喷水孔不断向拖布组件12喷水以对拖布122进行清洗。
91.本实用新型实施例中,清洁刷25用于对扫地机器人1的拖布组件12进行清洗,使基座2可以实现扫地机器人1的拖布组件12的清洗功能,大大丰富了基座2的功能。
92.本实用新型实施例中,座体21上设有清洗位214,清洁刷25位于清洗位214下方。当扫地机器人1回到基座2进行清洗拖布组件12时,拖布组件12的位置与清洗位214相对应,驱动装置221带动清洁刷25相对拖布组件12来回运动,从而对拖布组件12的拖布122进行刷洗。
93.其中,驱动装置221可带动清洁刷25相对拖布组件12来回运动,且驱动装置221可以带动拆装布机构22对锁扣机构13进行解锁或锁定,清洁刷25和拆装布机构22共用一套驱动装置221作为动力,可以降低生产成本,且可以使整个基座2的结构更加紧凑。除本实施例外,清洁刷25和拆装布机构22也可以分别采用不同的动力装置。
94.作为本实用新型的一个实施例,拆装布机构22还包括:
95.与驱动装置221连接的传动组件,清洁刷25固定于传动组件上,驱动件223设置于传动组件或清洁刷25上。
96.本实施例中,驱动件223和清洁刷25共用一套传动组件,从而可以进一步降低生产成本,且可以使整个基座2的结构更加紧凑。
97.本实施例中,当扫地机器人1需要清洗拖布组件12时,扫地机器人1运动到座体21上,驱动装置221通过传动组件带动清洁刷25在拖布组件12的下方相对拖布组件12来回运动,从而来回对拖布组件12进行清洗。当扫地机器人1需要拆卸拖布组件12时,扫地机器人1运动到座体21上,驱动装置221通过传动组件带动驱动件223运动,驱动件223驱动滑块222顶压按键132,使按键132与卡扣件131脱扣,从而实现锁扣机构13的解锁,扫地机器人1的机器人本体11从座体21上退出时即可实现拖布组件12的拆卸。
98.作为本实用新型的一个实施例,驱动件223设置于清洁刷25并与清洁刷25同步运动;传动组件可带动清洁刷25在第一位置与第二位置之间运动以清洗拖布组件12,且传动组件可带动清洁刷25运动到第三位置以使驱动件223驱动滑块222对锁扣机构13解锁。
99.作为本实用新型的一个实施例,基座2对应第一位置、第二位置以及第三位置分别设置有用于检测清洁刷25位置的检测传感器27,每个检测传感器27分别与第一控制单元电连接。其中,图11中的三个检测传感器27从右到左依次对应第一位置、第二位置以及第三位置。
100.本实施例中,通过在基座2上的对应第一位置、第二位置以及第三位置分别设置检测传感器27,便于检测清洁刷25的运动位置,方便第一控制单元根据实际需要控制清洁刷25运动。
101.作为本实用新型的一个实施例,检测传感器27为霍尔传感器,清洁刷25的一端固定一个磁铁28,利用霍尔传感器检测到磁场信号即可判断清洁刷25的运动位置,结构简单,实现成本低。例如,当第二位置的检测传感器27检测到磁场信号时,即可判断清洁刷25的运动到第二位置。
102.其中,三个检测传感器27依次间隔设置,三个检测传感器27划分出两段运动区域。当驱动装置221驱动清洁刷25在第一位置和第二位置之间的运动区域往复运动时,清洁刷
25可以清洗拖布组件12;当清洁刷25进入第二位置与第三位置之间的运动区域时,清洁刷25上的驱动件223会推动滑块222运动,使滑块222向按键132方向顶出,从而实现锁扣机构13的解锁;当清洁刷25退出第二位置与第三位置之间的运动区域时,清洁刷25上的驱动件223会离开滑块222,滑块222则通过弹性件224复位,从而按键132可以自动复位,使锁扣机构13重新锁定。除本实施例外,检测传感器27也可以为红外传感器,清洁刷25上则无需设置磁铁28,利用红外传感器可以直接检测清洁刷25运动位置。
103.作为本实用新型的一个实施例,滑块222底部设有第一斜面,驱动件223设有与滑块222底部配合的第二斜面。当清洁刷25进入第二段运动区域时,清洁刷25的第二斜面会推动滑块222底部的第一斜面,使滑块222往中间顶推按键132,滑块222和驱动件223利用斜面配合,使滑块222运动更加平稳。
104.作为本实用新型的一个实施例,传动组件26包括:
105.与驱动装置221传动连接的两组带轮261;以及
106.分别连接两组带轮261的两个皮带262,清洁刷25的两端分别固定于一个皮带262上。
107.本实施例中,基座21的两侧分别设有一组带轮261,每组带轮261通过一根皮带262传动,清洁刷25的两端分别固定在一根皮带262上,两根皮带262同时带动清洁刷25前后运动。除此之外,带轮261和皮带262也可以替换成链轮和链条。
108.作为本实用新型的一个实施例,传动组件26还包括:
109.齿轮减速箱264,齿轮减速箱264的输入轴与驱动装置221连接,齿轮减速箱264的输出轴连接一横杆265,横杆265两端分别与两组带轮261中的一个带轮261连接。
110.本实施例中,第一控制单元控制驱动装置221工作,驱动装置221带动横杆265正向或反向转动,横杆265同时带动两组带轮261同步转动,实现两根皮带262同步前后运动,两根皮带262带动清洁刷25前后运动进行拖布组件12的清洗或者带动驱动件223驱动滑块222对锁扣机构13解锁或锁定。
111.本实用新型提供的扫地机器人清洁系统的工作过程如下:
112.当扫地机器人1需要由拖地模式切换成扫地模式时,扫地机器人1向基座2发送相应的控制指令,基座2接收扫地机器人1发送的控制指令,行走机构带动扫地机器人1移动到基座2的座体21上。当基座2的座体21上的对位开关29检测到扫地机器人1与基座2对位完成后,基座2的第一控制单元控制驱动装置221工作,驱动装置221带动皮带262向前移动,皮带262带动清洁刷25和驱动件223从第一位置向前移动;当清洁刷25越过第二位置时,驱动件223驱动滑块222不断顶推按键132并使滑块222插入拖布组件12,直到清洁刷25移动到第三位置,此时按键132与卡扣件131完全脱扣,实现锁扣机构13的解锁,使滑块222与拖布组件12相固定,扫地机器人1的第二控制单元再控制行走机构从基座2退出,拖布组件12则停留在基座2上,即可实现扫地机器人1的拖布组件12的自动拆卸,此时扫地机器人1由拖地模式切换成扫地模式。
113.当扫地机器人1需要由扫地模式切换成拖地模式时,扫地机器人1的第二控制单元控制行走机构工作,行走机构带动扫地机器人1移动到基座2的座体21上,扫地机器人1回到基座2,扫地机器人1的卡扣件131与座体21上的拖布组件12的滑槽1213对位,扫地机器人1的机器人本体11与拖布组件12对位装配完成后。扫地机器人1向基座2发送相应的控制指
令,基座2接收扫地机器人1发送的控制指令,基座2的第一控制单元控制驱动装置221工作,驱动装置221带动皮带262向后移动,皮带262带动清洁刷25和驱动件223向后移动,使驱动件223与滑块222脱离,弹性件224则带动滑块222复位,滑块222从拖布组件12退出而与拖布组件12脱离,复位弹簧133带动按键132与卡扣件131重新扣合,使拖布组件12重新安装在机器人本体11,从而实现扫地机器人1的拖布组件12的自动安装,扫地机器人1从基座2退出即可进行拖地模式工作。
114.当扫地机器人1需要清洗拖布组件12时,扫地机器人1运动到座体21后,扫地机器人1向基座2发送相应的控制指令,基座2接收到扫地机器人1发送的控制指令后,基座2的第一控制单元控制驱动装置221工作,驱动装置221带动皮带262前后来回移动,皮带262带动清洁刷25相对拖布组件12在第一位置和第二位置之间来回运动,从而来回对拖布组件12进行清洗,实现拖布组件12的自动清洗。
115.本实用新型实施例提供的扫地机器人清洁系统通过在基座上设置拆装布机构,扫地机器人的拖布组件通过锁扣机构与机器人本体形成可拆卸连接,利用第一控制单元控制拆装布机构驱动锁扣机构解锁以使拖布组件与机器人本体拆卸,并利用第一控制单元控制拆装布机构驱动锁扣机构锁定以使拖布组件安装固定于机器人本体,通过基座扫地机器人的配合可以实现扫地机器人的拖布组件自动拆卸或安装,方便扫地机器人进行扫地和拖地功能的切换,无需人工拆卸或安装拖布组件,大大方便了用户使用,提升用户使用体验。
116.以上仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1