餐具剩食回收装置的制作方法
1.本实用新型涉及回收装置,具体涉及餐具剩食回收装置。
背景技术:
2.现有的餐具剩食回收装置,一般都是用夹取机构将餐盘夹住,然后使餐盘翻转,在餐盘翻转的过程中,在餐盘上的剩食被倒入剩食回收箱内,然后再对餐盘进行回收。
3.专利文献cn207541701u公开了一种餐具智能自动回收机,包括机柜,在机柜上设有传送装置、翻转机构、控制装置和检测装置。当检测装置检测到在传送装置上放置有餐盘时,控制装置就先控制传送装置把餐盘传送到翻转机构,再控制翻转机构向上翻转,因为翻转机构设有限位固定板,所以在翻转的过程中餐盘被限位固定板固定住从而不会掉落,而餐盘上的剩食会倒入剩食回收桶内,在此之后,控制机构再控制翻转机构向下翻转,因为在向下的方向上没有设置限位固定板,所以在向下翻转的过程中餐盘滑入后方的餐盘回收桶内。这种餐具智能自动回收机虽然可以通过翻转来使餐盘与其上的剩食分离,但是翻转过程中需要进行两次翻转,回收工序复杂。
技术实现要素:
4.本实用新型要解决的技术问题是提供一种回收工序简单的餐具剩食回收装置。
5.为解决上述技术问题,本实用新型的餐具剩食回收装置,包括翻转分离机构、翻转驱动机构、剩食回收区、第一餐具回收区,翻转分离机构接收装有剩食的餐用容器并设有餐具掉落口,餐具掉落口处设有关闭的门板,门板上开有第一剩食掉落孔;包括控制门板动作的开门机构;翻转驱动机构驱动翻转分离机构进行翻转从而带动餐用容器翻转直至餐具掉落口到达第一餐具回收区上方并对准第一餐具回收区,开门机构控制门板打开餐具掉落口从而把餐用容器排出到第一餐具回收区;翻转过程中,餐具掉落口连同关闭的门板及其第一剩食掉落孔途经剩食回收区上方并对准剩食回收区从而使剩食穿过门板的第一剩食掉落孔掉落到剩食回收区。
6.更进一步地,在未翻转状态下,所述翻转分离机构的开有餐具掉落口的一端朝向侧方,所述翻转分离机构翻转则其开有餐具掉落口的一端朝下摆动。
7.更进一步地,在未翻转状态下,所述翻转分离机构的开有餐具掉落口的一端朝侧下方倾斜。
8.更进一步地,所述翻转分离机构的顶部开有第二剩食掉落孔,第二剩食掉落孔对准放置在翻转分离机构内的餐用容器的顶口,在餐具掉落口到达第一餐具回收区上方并对准第一餐具回收区的状态下,第二剩食掉落孔对准剩食回收区从而使剩食从第二剩食掉落孔掉落到剩食回收区。
9.更进一步地,所述翻转分离机构设有剩食导向件,在第二剩食掉落孔对准剩食回收区的状态下,剩食导向件位于第二剩食掉落孔外的下方,倾斜导往剩食回收区。
10.更进一步地,所述开门机构安装在餐具掉落口处。
11.更进一步地,所述开门机构是电吸铁,所述门板是由可被电吸铁吸附的金属制成的,所述门板被电吸铁吸附则关闭餐具掉落口,在翻转分离机构翻转到餐具掉落口到达第一餐具回收区上方并对准第一餐具回收区的状态下,电吸铁不吸附门板则门板自然下垂从而打开餐具掉落口。
12.更进一步地,翻转分离机构包括餐具进入口,所述餐具进入口位于翻转分离机构的远离餐具掉落口的一端,且翻转分离机构的开有餐具进入口的一侧的底部设有餐用容器传送机构,所述餐用容器传送机构开有漏孔供勺子和筷子掉落;包括第二餐具回收区,其设在未翻转时的翻转分离机构的餐用容器传送机构下方;分开的勺子、筷子和装有剩食的餐用容器三者从餐具进入口进入翻转分离机构,餐用容器传送机构把上述三者传送至翻转分离机构的设有餐具掉落口的一侧,此过程中,勺子和筷子从漏孔掉落进入第二餐具回收区内。
13.更进一步地,所述餐用容器传送装置是滚筒传送带,所述漏孔是滚筒传送带的滚筒之间的间隙。
14.因为翻转分离机构翻转过程中,餐具掉落口连同关闭的门板及其第一剩食掉落孔途经剩食回收区上方并对准剩食回收区,所以此时剩食就可以穿过门板的第一剩食掉落孔掉落到剩食回收区;因为翻转分离机构翻转直至餐具掉落口到达第一餐具回收区上方并对准第一餐具回收区,此时门板打开餐具掉落口,餐具剩食回收装置就可以把餐用容器排出到第一餐具回收区。因此,餐具剩食回收装置能够在一个翻转过程中实现餐具剩食分离以及餐具回收两个动作,所以回收工序简单。
附图说明
15.图1是自动清洁餐桌系统的轴测图。
16.图2是自动清洁餐桌和餐具剩食回收装置分离的轴测图。
17.图3是自动清洁餐桌的爆炸图。
18.图4是餐桌底座的轴测图。
19.图5是活动桌面机构的爆炸图。
20.图6是图5中b部位的局部视图。
21.图7是图5中a部位的局部视图。
22.图8是喷淋清洁机构的轴测图。
23.图9是滚动清洁机构的轴测图。
24.图10是餐具剩食回收装置的爆炸图。
25.图11是升降机构的轴测图。
26.图12是翻转分离组件的爆炸图。
27.图13是翻转分离组件的门板打开的轴测图。
28.图14是图2中d-d的剖视图。
29.图15是图14中f部位的局部视图。
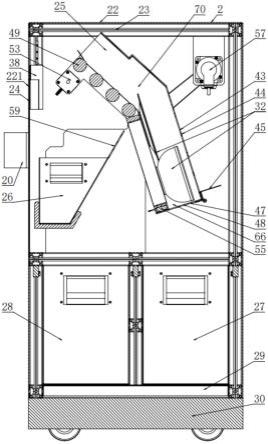
30.图16是图2中e-e的剖视图。
31.图17是翻转分离机构翻转到餐具掉落口朝向剩食回收箱的剖视图。
32.图18是翻转分离机构翻转到餐具掉落口朝向碗盘回收箱的剖视图。
33.图19是门板打开后的示意图。
具体实施方式
34.见图1和图2,自动清洁餐桌系统包括自动清洁餐桌1和餐具剩食回收装置2,自动清洁餐桌1设有第一对接机构10,餐具剩食回收装置2设有第二对接机构20,自动清洁餐桌1和餐具剩食回收装置2通过对接机构10、20实现对接,自动清洁餐桌1对接餐具剩食回收装置2则形成图1的状态。自动清洁餐桌1把其上的餐具3传送到右端的餐具剩食回收装置2内,即传送带151将桌面上的物件送至物件排出端排出从而运离桌面。餐具剩食回收装置2对准传送带151的右端承接被排出的物件,然后自动清洁餐桌1和餐桌回收装置2两者脱离,形成图2的状态。上述餐具3包括勺子、筷子以及作为餐用容器的碗盘,碗盘内装有剩食,餐具剩食回收装置2对勺子、筷子、餐用容器和剩食进行分离。
35.见图1,本实施例里,以自动清洁餐桌1为左,以餐具剩食回收装置2为右,以自动清洁餐桌1和餐具剩食回收装置2两者朝向读者的一面为前面,以自动清洁餐桌1和餐具剩食回收装置2两者背向读者的一面为后面。
36.见图3,自动清洁餐桌1包括餐桌底座11、活动桌面机构15、调料盒16、喷淋清洁机构12、作为污水回收容器的污水回收箱13和滚动清洁机构14,喷淋清洁机构12、污水回收箱13和滚动清洁机构14都安装在餐桌底座11内。
37.见图5、图6和图7,活动桌面机构15包括由主动轴155、从动轴158、两根侧支撑条157、多根连接条156、上桌板152和下桌板161组成的传送带支架、传送带151以及设在传送带支架上的桌面驱动机构,传送带151套在传送带支架和桌面驱动机构两者的外部,由桌面驱动机构驱动。见图5和图6,桌面驱动机构包括桌面驱动电机153和传动轴154,两者都安装在传送带支架上,桌面驱动电机153通过锥齿轮驱动传动轴154转动,传动轴154通过直齿轮传动带动主动轴155转动,主动轴155和从动轴158分别套在传送带151内部的两端,所以在传送带151绷紧的状态下,主动轴155转动会带动传送带151运动和从动轴158转动。因为锥齿轮传动和直齿轮传动都属于现有技术,所以不详细描述。见图7,活动桌面机构15包括由松紧块159和松紧螺丝160组成的松紧组件,该松紧组件属于常规技术,所以不详细描述,只简要描述其作用:用户通过调节松紧螺丝160来调整从动轴158与主动轴155两者之间的相对距离,从而调整传送带151的松紧程度。
38.见图8,喷淋清洁机构12包括作为清洁剂容器的清洁剂槽121、气泵125、作为喷射清洁件的虹吸喷嘴122、气管123、虹吸管124、水位传感器126。见图15,清洁剂槽121包括放置有清洁剂的槽体1211,槽体1211的左侧往右上方延伸形成有喷嘴固定板1212,虹吸喷嘴122固定在喷嘴固定板1212上,槽体1211的右侧往左方延伸形成有传感器固定板1213,水位传感器126固定在传感器固定板1213上。虹吸喷嘴122具有虹吸结构,包括作为泵气输入端的气体接口1221、喷射口1223和作为液体输入端的液体接口1222,气体接口1221经气管123连接气泵125,液体接口1222连接虹吸管124的上端,虹吸管124往下伸入槽体1211内,虹吸管124的下端伸入清洁剂的液面内,从而使得在气泵125向气体接口1221泵出气流之后,虹吸喷嘴122能够经虹吸管124从清洁剂槽121虹吸清洁剂,虹吸上来的清洁剂则被气体接口1221接收的气流带至喷射口1223喷出。
39.见图3,污水回收箱13的结构与清洁剂槽121的结构相似,污水回收箱13包括用于
盛放污水的槽体、门板和拉手,因该结构较为简单,所以不做赘述。
40.见图9,滚动清洁机构14包括作为滚轮擦拭件的多根滚动抹布144和安装件142。多根滚动抹布144包括多根滚轮,滚轮的外轴可绕内轴转动,滚轮外部套有空心圆柱形抹布,这多根滚动抹布144各自的抹布受到摩擦力时可以带动各自的滚轮的外轴绕滚轮轴线转动。这多根滚动抹布144各自的内轴的两端分别可拆卸地固定在安装件142上。
41.图14,污水回收箱13处于喷淋清洁机构12和滚动清洁机构14之间,活动桌面机构15安装在餐桌底座11上,传送带151的朝上的一面作为桌面,调味盒16在餐桌底座11的支撑下,处于活动桌面机构15的左端,但不接触活动桌面机构15,且调味盒16的中间开有调味料放置孔165,用于放置调味料。喷淋清洁机构12和滚动清洁机构14共同组成对传送带151进行清洁的清洁机构,该清洁机构位于传送带151下方,多根滚动抹布144抵住传送带151的位于桌面下方的部位。
42.见图10,餐具剩食回收装置2包括外壳22、支撑架23、升降机构24、翻转分离组件25、作为第一餐具回收区的碗盘回收箱28、作为第二餐具回收区的勺筷回收箱26、作为剩食回收区的剩食回收箱27、回收箱支撑板29和agv移动底盘30。外壳22的左面开有餐具回收口221,升降机构24可用于开启或关闭餐具回收口221,外壳22的前后两面都开有勺筷回收箱抽拉口222、剩食回收箱抽拉口224和碗盘回收箱抽拉口223。勺筷回收箱26、剩食回收箱27和碗盘回收箱28三者共同组成回收机构。
43.见图11,升降机构24包括升降电机35、升降电机固定座37、升降齿轮34、与升降齿轮34啮合的升降齿条36、两条滑轨33、一个升降门38以及分别与两条滑轨33匹配的两个滑块39,升降齿条36和两个滑块39固定在升降门38上,升降电机35经升降电机固定座37固定在支撑架23(见图10)上,滑轨33也固定在支撑架23(见图10)上,升降电机35通过驱动升降齿轮34转动,来带动升降齿条36升降,从而带动升降门38升降,以开启或关闭餐具回收口221(见图10)。
44.因为视角关系,翻转分离组件25的各部件在图12中的方向与实际上不同,本实施例以各部件在实际上的方向进行描述。见图12和图13,翻转分离组件25包括能够进行翻转的翻转分离机构70以及驱动翻转分离机构70翻转的翻转驱动机构。翻转分离机构70包括分离罩支架50和分离罩43,分离罩支架50的左侧安装有作为餐用容器传送机构的滚筒传送带49,还设有滚筒电机53和滚筒电机固定座54,滚筒电机53经滚筒电机固定座54固定安装在分离罩支架50上,且经带传动带动滚筒传送带49滚动。分离罩支架50的右侧设有与左侧的滚筒传送带49相垂直的多根分离滚筒51。分离罩43的形状与分离罩支架50相适配,分离罩43盖在分离罩支架50上,使得翻转分离机构70内部形成一条餐具传送通道,且翻转分离机构70左端为餐具进入口,右端为餐具掉落口66,餐具3可从餐具进入口进入翻转分离机构70内,从餐具掉落口66离开翻转分离机构70。分离罩43的右端顶部经铰链活动连接有门板47,门板47上开有第一剩食掉落孔48,分离罩43的右端底部设有控制门板47动作的电吸铁55,门板47由可被电吸铁55吸附的金属制成,电吸铁55作为开门机构:通电则吸附门板47,使其关闭餐具掉落口66;不通电则门板47在铰链的限位下自由摆动。分离罩43的右侧顶部开有第二剩食掉落孔44,分离罩43的右端顶部设有作为剩食导向件的剩食导向板45。分离罩支架50的前后两侧分别设有翻转轴41。翻转驱动机构包括翻转电机57、翻转电机固定座58和两块翻转支撑板56,两块翻转支撑板56之间安装有勺筷导向板59,且两块翻转支撑板56固
定安装在支撑架23(见图10)上,翻转电机57经翻转电机固定座58也固定在支撑架23(见图10)上,翻转分离机构70两侧的翻转轴41分别穿过两块翻转支撑板56,翻转电机57经带传动带动翻转轴41转动,则可以带动翻转分离机构70翻转。
45.见图16,支撑架23安装在外壳22内,升降机构24固定在餐具剩食回收装置2的左上部,翻转分离组件25固定在餐具剩食回收装置2的上部,此状态下翻转分离机构70是初始状态,未进行翻转,勺筷回收箱26设在此状态下的翻转分离机构70的滚筒传送带49下方,碗盘回收箱28设在餐具剩食回收装置2的左下部,剩食回收箱27设在餐具剩食回收装置2的右下部。在两个回收箱27、28下方是回收箱支撑板29,餐具剩食回收装置2的底部则是agv移动底盘30。由图16可知,在初始状态下,翻转分离机构70的开有餐具掉落口66的一端朝右侧下方倾斜。
46.见图1、图2、图15和图16,自动清洁餐桌1包括用于发出清洁指令的指令发送器(图中未示出)。餐具剩食回收装置2包括用于接收清洁指令的指令接收器(图中未示出)和控制升降机构24、翻转分离组件25和agv移动底盘30运动的控制器(图中未示出)。当食客吃完饭之后,自动清洁餐桌1的桌面上留有餐具3,即分开的勺子、筷子以及作为餐用容器的碗盘32,碗盘32内装有剩食,勺子和筷子以下简称勺筷31,自动清洁餐桌1的指令发送器发出清洁指令,餐具剩食回收装置2的指令接收器接收到清洁指令,控制器就控制agv移动底盘30运动,从而使得餐具剩食回收装置2移动到自动清洁餐桌1右侧,两者通过各自的对接机构10、20实现对接。见图10、图11和图16,对接完成之后,控制器控制升降机构24把升降门38升起,从而打开餐具回收口221。见图14和图15,自动清洁餐桌1将桌面上方的餐具3送入餐具回收口221,且对清洁机构对传送带151进行清洁,具体如下:见图5、图6、图9、图10、图14和图15,桌面驱动电机153开始工作,驱动传动轴154转动,从而驱动主动轴155转动,主动轴155带动传送带151运动和从动轴158转动,从而把餐具3往右传送给餐具剩食回收装置2,且传送带151的位于桌面下方的部位从右往左移动依次经过喷淋清洁机构12、污水回收箱13和滚动清洁机构14,同时喷淋清洁机构12也开始工作,气泵125为虹吸喷嘴122提供气流,虹吸喷嘴122经气体接口1221接收气泵125提供的气流,从液体接口1222向清洁剂槽121虹吸清洁剂,清洁剂经液体接口1222被吸入虹吸喷嘴122后,被气流带至喷射口1223喷向传送带151的位于桌面下方的部位,从而清洁传送带151,传送带151上的污水下落到污水回收箱13内,且滚动抹布144在传送带151的带动下绕滚轮轴线滚动,从而擦拭传送带151的位于桌面下方的部位上的污水。图16,滚筒传送带49将传送到餐具回收口221的勺筷31和碗盘32从餐具回收口221往右传送,如此则勺筷31和碗盘32都会经过滚筒传送带49的多根滚筒,滚筒传送带49的多根滚筒之间留有间隙,且该间隙作为漏孔比勺筷31大,使得勺筷31在经过该间隙的时候,从该间隙掉入勺筷回收箱26内,此过程中勺筷导向板59对掉落的勺筷31起导向作用,碗盘32则被传送到翻转分离机构70的右侧,为方便浏览,图17、图18和图19将不再画出勺筷31。见图2、图11和图16,当滚筒传送带49把碗盘32传送到翻转分离机构70的右侧之后,控制器控制升降机构24降下升降门38,且控制agv移动底盘30移动从而使得餐具剩食回收装置2离开自动清洁餐桌1,即agv移动底盘30移动带动回收机构离开自动清洁餐桌1。见图16,电吸铁55吸附住门板47,门板47关闭餐具掉落口66从而挡住碗盘32,翻转电机57工作,从而驱动翻转轴41转动,进而使翻转分离机构70顺时针翻转,即翻转分离机构70的右端朝下摆动,碗盘32也跟随翻转。见图17,翻转分离机构70翻转过程中餐具掉落口66、门板47
以及开在门板47上的第一剩食掉落孔48途经剩食回收箱27上方并对准剩食回收箱27,所以此状态下碗盘32上的剩食穿过开在门板47上的第一剩食掉落孔48落入剩食回收箱27内。开在分离罩43顶部的第二剩食掉落孔44对准翻转分离机构70内的碗盘32的顶口,翻转分离机构70翻转直至如图18所示,餐具掉落口66到达碗盘回收箱28上方,此状态下第二剩食掉落孔44对准剩食回收箱27,且剩食导向板45位于第二剩食掉落孔44的下方,碗盘32内残留的剩食从第二剩食掉落孔44掉落经剩食导向板45倾斜导往剩食回收箱27。见图19,翻转分离机构70翻转到餐具掉落口66到达碗盘回收箱28上方后,经过一定的时间,剩食已全部倒入剩食回收箱27内,则控制器控制电吸铁55停止对门板47进行吸附,门板47因重力作用而自然下垂,打开餐具掉落口66,从而使得碗盘32被排出,碗盘32在重力作用下沿翻转分离机构70滑入碗盘回收箱28内。
47.见图4、图8、图9和图15,餐桌底座11的壳体112从左到右依次开设有安装件抽拉口1121、污水回收箱抽拉口1122和清洁剂槽抽拉口1123,上述三个抽拉口1121、1122、1123都设有磁铁1124。餐桌底座11设有两对中间留有间隙的喷淋导向块115,清洁剂槽121的左右两侧设有喷淋滑动板1214,每一侧的喷淋滑动板1214都卡入对应的一对喷淋导向块115的间隙,从而使得清洁剂槽121能够沿喷淋导向块115的间隙滑动,清洁剂槽121的前端设有第一门板127和第一拉手128,气管123是软管,所以在喷淋清洁机构12安装在餐桌底座11内之后,气泵125固定安装在餐桌底座11内,当水位传感器126感应到清洁剂不足时,用户能够通过拉动第一拉手128,来使清洁剂槽121滑动一段距离从而穿过清洁剂槽抽拉口1123露出餐桌底座11外,进而方便添加清洁剂。见图3、图4和图15,餐桌底座11设有两块污水导向板116和两块开有凹槽的污水箱导向块117,两块污水导向板116将污水导向污水回收箱13,污水回收箱13包括回收槽体131,回收槽体131的两侧各自设有用于插入该侧对应的污水箱导向块117的凹槽的污水箱滑动板134,污水回收箱13的前端设有第二门板和第二拉手,用户可通过拉动第二拉手来使污水回收箱13穿过污水回收箱抽拉口1122离开餐桌底座11,从而倒出污水。见图3、图4、图10和图15,餐桌底座11上设有导轨固定块118,自动清洁餐桌1包括导轨145,导轨145的上部和下部可以相对滑动,导轨145的上部固定安装在安装件142上,导轨145的下部固定安装在导轨固定块118上,从而使得安装件142能够沿导轨145的下部滑动,即安装件142是活动安装在餐桌底座11内的。滚动清洁机构14的前端设有第三门板146和第三拉手147,用户可以通过拉动第三拉手147来抽出安装件142使其穿过安装件抽拉口1121离开餐桌底座11,从而更换安装件142上的滚动抹布144。
48.见图14和图15,相对于使用水泵来进行喷水的自动清洁餐桌,本实施例的自动清洁餐桌1使用气泵125来从清洁剂槽121里虹吸清洁剂,虹吸上来的清洁剂被虹吸喷嘴122的泵气输入端1221所接收的气流带至喷射口1223喷出,气泵125在整个喷水过程中没有直接接触液体,所以自动清洁餐桌1的漏电危险小。
49.见图16、图17、图18和图19,因为翻转分离机构70翻转过程中,餐具掉落口66连同关闭的门板47及其第一剩食掉落孔48途经剩食回收区27上方并对准剩食回收区27,所以此时剩食就可以穿过门板47的第一剩食掉落孔48掉落到剩食回收区27;因为翻转分离机构70翻转直至餐具掉落口66到达第一餐具回收区28上方并对准第一餐具回收区28,此时门板47打开餐具掉落口66,餐具剩食回收装置2就可以把碗盘32排出到第一餐具回收区28。因此,餐具剩食回收装置2能够在一个翻转过程中实现餐具剩食分离以及餐具回收两个动作,所
以回收工序简单。
50.见图2,因为餐具剩食回收装置2可以自动与自动清洁餐桌1对接并接收自动清洁餐桌1上的餐具3,接收完成之后,餐具剩食回收装置2就离开自动清洁餐桌1,所以多个自动清洁餐桌1只需要配备一个餐具剩食回收装置2就可以了,不需要给每一个自动清洁餐桌1都配备回收机构,因此这种自动清洁餐桌系统占用的空间小。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1