清洁机系统的制作方法
1.本实用新型属于家庭洗涤、清扫领域,具体涉及一种清洁机系统。
背景技术:
2.地面清洁机为吸尘器或扫地机,吸尘器或扫地机中将底面上混有水汽的灰尘等混合物吸入到其内腔中。
3.目前,为了对清洁机内部进行清洁,通常设置基站,如中国实用新型专利《清洁设备的基站》,其专利号为zl201921405055.5(授权公告号为cn210727661u)公开了一种清洁设备的基站,包括:平台、清洁机构、储水件以及液体泵,清洁设备行驶在平台的上表面上;清洁机构设置在平台上,清洁机构包括喷水件、转动设置的转动体和驱动件,驱动件与转动体相连以驱动转动体转动,转动体与清扫件接触,喷水件具有朝向清扫件和转动体中的至少一个喷水的喷水孔;储水件设在平台上,喷水件通过管道与储水件连通;液体泵分别与喷水件和储水件相连。上述专利中的基站上设置有污水箱和清水箱,基站中的清水盒能向清洁设备中的水盒注水,基站上的喷水件能向清洁设备的清扫件进行清理,清理下来的污水在平台上集聚,抽水电机能将污水抽至污水盒内进行储存。但是在清洁设备(清洁机)与基站相对且两者之间出现偏差时,扫地机无法进入至基站内。
技术实现要素:
4.本实用新型所要解决的第一个技术问题是针对上述现有技术的现状,提供一种清洁机准确进入基站内的清洁机系统。
5.本实用新型所要解决的第二个技术问题是,提供了一种防止污水管路堵塞的清洁机系统。
6.本实用新型解决上述第一个技术问题所采用的技术方案为:一种清洁机系统,包括有
7.清洁机,包括有机体及用来带动所述机体行走的转动轮,所述转动轮设置在所述机体的底部;
8.基站,其具有容置腔,所述容置腔具有供所述清洁机进入的敞口;
9.驱动机构,用来驱动所述转动轮转动,其动力输出端与所述转动轮相连接;
10.控制器,与所述驱动机构电信号连接;
11.其特征在于:所述容置腔在与所述敞口相对的第一壁板上设置有左右间隔布置的两个第一红外发射器,所述清洁机的前壁板上设置有两个能接收各所述第一红外发射器发出的红外光的第一红外接收器,所述控制器与所述第一红外发射器和第一红外接收器电信号连接,从而控制所述驱动机构带动所述转动轮转动继而使所述清洁机运动至所述容置腔内。
12.当位于左侧的第一红外接收器接收到位于右侧的第一红外发射器发出的红外光时,则说明清洁机处于偏右的位置,控制器控制清洁机朝左运动;当位于右侧的第一红外接
收器接收到位于左侧的第一红外发射器发出的红外光时,则说明清洁机处于偏左的位置,控制器控制清洁机朝右运动,当位于左侧的第一红外接收器接收到位于左侧的第一红外发射器发出的红外光,位于右侧的第一红外接收器接收到位于右侧的第一红外发射器发出的红外光时,说明清洁机与基站的容置腔正对布置,控制器控制清洁机准确运动至容置腔内。
13.优选地,在所述清洁机位于所述容置腔内的状态下,所述第一红外发射器与第一红外接收器一一对应布置。
14.为了对与容置腔相距相对较远位置的清洁机调整至基站容置腔相对布置,所述基站的左右两外侧壁上均设置有第二红外发射器,所述清洁机的左右两外侧壁上均设置有能接收各所述第二红外发射器和第一红外发射器的第二红外接收器,所述控制器与所述第二红外发射器和第二红外接收器电信号连接。当位于左侧的第二红外接收器接收到位于右侧的第二红外发射器发出的红外光时,则说明清洁机处于偏右的位置,控制器控制清洁机朝左运动;当位于右侧的第二红外接收器接收到位于左侧的第二红外发射器发出的红外光时,则说明清洁机处于偏左的位置,控制器控制清洁机朝右运动;当位于左侧的第二红外接收器接收到位于左侧的第二红外发射器发出的红外光,而位于右侧的第二红外接收器接收到位于右侧的第二红外发射器发出的红外光时,清洁机处于与容置腔相对的位置。
15.为了对进入敞口的清洁机进行导向,所述容置腔的敞口处设置有导向板,所述导向板的顶面为自下向上逐渐朝所述敞口方向倾斜的倾斜面。
16.优选地,所述倾斜面的顶端位于所述敞口的底沿之下或者所述倾斜面的顶端与所述敞口的底沿基本在同一水平面上。
17.为了减小清洁机与容置腔侧壁之间的摩擦力,使得清洁机顺畅地进入至容置腔内,所述容置腔的左右相对两侧壁上均转动设置有至少一个导向轮,所述导向轮局部位于所述容置腔内,且所述导向轮的转动轴线上下延伸,在所述清洁机位于所述容置腔内的状态下,所述清洁机位于左右两侧的导向轮之间,且与对应侧的导向轮相接触。
18.为了对后续清洁机在容置腔内的行走进行前后导向,所述容置腔的左右两侧壁上均设置有两根前后延伸且上下间隔布置的导向条,至少一个所述导向轮位于对应侧的两根所述导向条之间。
19.本实用新型解决上述第二个技术问题所采用的技术方案为:所述底座上设置有污水箱,所述容置腔的底板上设置有底盘,所述底盘与所述底板之间形成有与所述污水箱相连通的腔室,所述底盘上开设有与所述腔室相连通的过滤孔,沿着流体流动路径,所述腔室位于所述污水箱的上游。
20.为了增大过滤下来的颗粒、垃圾等的容置空间,所述底盘局部向下凹陷形成有凹腔,所述过滤孔开设在所述凹腔的底壁上。
21.为了实现对清洁机的清洗,所述底座上设置有净水箱,所述腔室内设置有与所述净水箱连通的净水管,沿着流体流动路径,所述净水箱位于所述腔室的上游,所述净水管的出水端安装有用来对清洁机进行清洗的喷头,所述喷头至少局部位于所述过滤孔之上。
22.与现有技术相比,本实用新型的优点在于:该清洁机系统的容置腔内设置有两个第一红外发射器,清洁机的前壁板上设置有两个第一红外接收器,当位于左侧的第一红外接收器接收到位于右侧的第一红外发射器发出的红外光时,则说明清洁机处于偏右的位置,控制器控制清洁机朝左运动;当位于右侧的第一红外接收器接收到位于左侧的第一红
外发射器发出的红外光时,则说明清洁机处于偏左的位置,控制器控制清洁机朝右运动,当位于左侧的第一红外接收器接收到位于左侧的第一红外发射器发出的红外光,位于右侧的第一红外接收器接收到位于右侧的第一红外发射器发出的红外光时,说明清洁机与基站的容置腔正对布置,控制器控制清洁机准确运动至容置腔内,从而达到清洁机与基站的准确对接的效果。
附图说明
23.图1为本实施例的基站的结构示意图;
24.图2为图1的另一角度的结构示意图;
25.图3为图1的立体分解结构示意图;
26.图4为图1中底板和底盘的装配结构示意图;
27.图5为图4的立体分解结构示意图;
28.图6为图5中底盘的结构示意图;
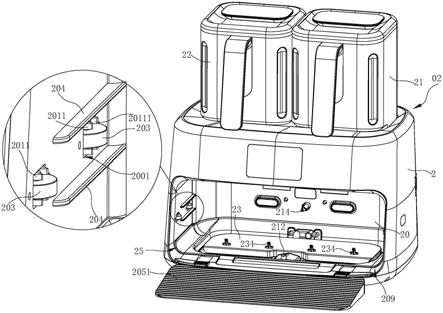
29.图7为本实施例中清洁机与基站处于对接状态下的清洁机系统的结构示意图;
30.图8为本实施例中清洁机刚进入容置腔内的剖视图;
31.图9为图7中清洁机水平位于容置腔内的剖视图;
32.图10为图7的剖视图;
33.图11为图1中去掉内箱体的结构示意图;
34.图12为图7的部分结构的剖视图;
35.图13为基站的剖视图;
36.图14为扫地机的正视图。
具体实施方式
37.以下结合附图实施例对本实用新型作进一步详细描述。
38.如图7至图12所示,本实施例的清洁机系统包括有清洁机和基站02,其中清洁机为扫地机01。
39.如图8所示,扫地机01包括有分离模块04、风机5及用来对待清洁物体进行清洁的刷头模块1。结合图9所示,刷头模块1包括有导风通道11和刷头13,导风通道11具有开口朝下的吸尘口111及与分离模块04流体连通的出风口113,刷头13位于导风通道11内且邻近吸尘口111的位置上。沿着气流流动路径,分离模块04位于刷头模块1和风机5之间,分离模块04内部具有能容置垃圾的分离腔41,分离腔41具有进入口和出口,分离模块04的进入口与刷头模块1的吸尘口111相连通,分离模块04的出口与风机5的进口相连通。在风机5的作用下,会使刷头模块1和分离模块04内形成负压,从而将灰尘、水等垃圾经吸尘口111吸入刷头模块1内,随后将经分离模块04进行分离后的气体排出,分离下来的比重较大的颗粒或水等沉积在分离腔41内。
40.如图8所示,本实施例中的分离腔41内设置有挡板413,当经出风口113流出的混合气流进入分离腔41内后,与挡板413进行撞击,那么比重较大的颗粒或水等沉积在分离腔41内。
41.如图4所示,扫地机01包括有机体03、驱动机构及用来带动机体03行走的转动轮
31,转动轮31设置在机体03的底部;驱动机构32用来驱动转动轮31转动,该驱动机构32的动力输出端与转动轮31相连接,该驱动机构32为电机,控制器与驱动机构32电信号连接。
42.如图4至图6所示,上述的基站01包括有底座2、净水箱21、污水箱22、导向轮203、底盘23、第一红外发射器202、第一红外接收器102、第二红外发射器206及第二红外接收器106。
43.如图2至图6所示,底座2竖向设置,底座2具有容置腔20,容置腔20具有供清洁机进入的敞口209。具体地,如图8至图10所示,底座2包括有内箱体200和位于内箱体200外围的外箱体201,外箱体201的底部敞口,內箱体200的內腔即为前述的容置腔20。
44.容置腔20在与敞口209相对的第一壁板207上设置有左右间隔布置的两个第一红外发射器202,清洁机01的前壁板10上设置有两个能接收各第一红外发射器202发出的红外光的第一红外接收器102,控制器与第一红外发射器202和第一红外接收器102电信号连接,从而控制驱动机构32带动转动轮31转动继而使清洁机01运动至容置腔20内。在清洁机01位于容置腔20内的状态下,第一红外发射器202与第一红外接收器102一一对应布置。如图13所示,基站02的左右两外侧壁上均设置有第二红外发射器206,如图14所示,清洁机01的左右两外侧壁上均设置有能接收各第二红外发射器206和第一红外发射器202的第二红外接收器106,控制器与第二红外发射器206和第二红外接收器106电连接。
45.如图1和图2所示,容置腔20的左右两侧壁上均设置有至少一个导向轮203,具体地,容置腔20的左侧壁上设置有前后间隔布置的两个导向轮203,且容置腔20的左侧壁上设置有两根前后延伸且上下间隔布置的导向条204,位于后侧的导向轮203位于两根导向条204之间,具体参见图2所示。容置腔20的右侧壁上设置有前后间隔布置的两个导向轮203,且容置腔20的右侧壁上设置有两根前后延伸且上下间隔布置的导向条204,位于后侧的导向轮203位于前述两根导向条204之间。另外,容置腔20左侧壁上的导向轮203与容置腔20的右侧壁上的导向轮203一一对应,在本实施例中,左侧壁上位于前侧的导向轮203与右侧壁上位于前侧的导向轮203相正对布置,左侧壁上位于后侧的导向轮203与右侧壁上位于后侧的导向轮203也相正对布置。
46.如图1、图2和图11所示,上述导向轮203的安装方式相同,以下以位于左侧的其中一个导向轮203为例进行说明。如图2所示,内箱体200的左侧壁在对应导向轮204的位置上开设有避让口2001,外箱体201在对应避让口2001的位置上设置有支架2011,如图11所示,支架2011上具有开口朝向容置腔的c形口20111,导向轮204通过转轴206安装在对应的c形口20111内,前述的转轴206上下延伸,且该转轴206的轴线即为上述的转动轴线。
47.如图8至图10及图12所示,扫地机01能局部位于容置腔20内,在扫地机01局部位于容置腔20内的状态下,刷头13位于容置腔20内,扫地机01位于左右两侧的导向轮203之间,且与对应侧的导向轮203相接触,具体参见图12所示。
48.为了对扫地机进入容置腔内时进行导向,容置腔20的底板25的敞口处设置有导向板205,导向板205的顶面为自下向上逐渐朝敞口209方向倾斜的倾斜面2051,倾斜面2051的顶端与底盘23的顶面基本在同一水平面上。底盘23与容置腔20的敞口209的底沿基本在同一水平面上。
49.为了方便对容置腔进行清理,如图3所示,容置腔20的底板25至少局部能脱卸式地安装在容置腔20的对应位置上。具体地,底板25包括具有开口2510的连接板251和覆盖在连
接板251之开口2510处的主板252,如图5所示,上述的主板252局部向下凹陷形成有与污水箱22相连通的容水槽2521。为了方便对主板252进行支撑,如图3所示,连接板251在位于开口2510的左右两侧均形成有前后延伸的台阶2511,主板252左右两侧边搁置在对应侧的台阶2511上,主板252的底部覆盖在上述开口2510处。
50.为了方便对进入容水槽2521内的水进行过滤,容水槽2521的顶部敞口处覆盖有底盘23,底盘23脱卸式地安装在容置腔20的底板25上,具体地,为了实现底盘23与底板25的连接,如图5和图6所示,底盘23脱卸式地安装在容置腔20的底板25的主板252上,具体地,为了实现底盘23与主板252的连接,底板25的主板252上具有向上延伸的定位柱2522,底盘23的底面在对应定位柱2522的位置上设置有供该定位柱2522局部插设在其中的定位孔232,定位孔232与容置腔20互不连通。
51.如图4和图5所示,上述的底盘23位于主板252之上,并与主板252之间形成有与污水箱22相连通的腔室24,具体参见图9所示。如图1、图4和图5所示,底盘23局部向下凹陷形成有凹腔231,凹腔231的底壁上开设有与腔室24相连通的过滤孔2311,沿着流体流动路径,腔室24位于污水箱22的上游,腔室24和污水箱22之间通过污水管路相连接。如此,污水箱22通过管路与腔室24相连通,为了方便将腔室24内的污水抽吸至污水箱22内,外箱体201和内箱体200之间设置有污水泵,污水泵的进入端与腔室24相连通,污水泵的出水端与污水箱22相连通。
52.如图1至图3及图7所示,净水箱21设置在底座2之上,且与污水箱22并排布置。如图5所示,腔室24内设置有与净水箱21连通的净水管211,沿着流体流动路径,净水箱21位于腔室24的上游,净水管211的出水端安装有用来对扫地机的分离腔进行清洗的喷头212,如图10所示,喷头212自后向前逐渐向上倾斜,底盘23的凹腔231上开设有供喷头212的出水端向上穿出的通孔233,喷头212局部位于过滤孔2311之上,具体参见图4所示。
53.如图10所示,上述分离腔41的底部开设有排污口411及打开或关闭该排污口411的盖板412,在扫地机01位于容置腔20内实现对接的状态下,刷头13位于容置腔20内,且喷头212朝向排污口411,当打开排污口411后,喷头喷出液体对分离腔41内部进行清洗,具体参见图10所示。为了方便对扫地机刷头13上的毛发进行切割,如图1至图5所示,底盘23上设置有刀头234,刀头234竖向设置,且该刀头234位于喷头212的后方,具体参见图1所示。如图8和图9所示,在扫地机01朝容置腔20内运动的状态下,刀头234位于刷头13的运动路径上。上述说明书和权利要求中的竖向包括但不限于竖直。
54.在本实用新型的说明书及权利要求书中使用了表示方向的术语,诸如“前”、“后”、“上”、“下”、“左”、“右”、“侧”、“顶”、“底”等,用来描述本实用新型的各种示例结构部分和元件,但是在此使用这些术语只是为了方便说明的目的,是基于附图中显示的示例方位而确定的。由于本实用新型所公开的实施例可以按照不同的方向设置,所以这些表示方向的术语只是作为说明而不应视作为限制,比如“上”、“下”并不一定被限定为与重力方向相反或一致的方向。
55.本实用新型所称的“流体连通”是指两个部件或部位(以下统一分别称为第一部位、第二部位)之间的空间位置关系,即流体(气体、液体或两者的混合)能从第一部位沿着流动路径流动或/和被运送到第二部位,可以是所述的第一部位、第二部位之间直接相连通,也可以是第一部位、第二部位之间通过至少一个第三者间接连通,该第三者可以是诸如
管道、通道、导管、导流件、孔、槽等流体通道、也可以是允许流体流过的腔室或以上组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1