一种高空作业装置的制作方法
1.本实用新型涉及高空作业技术领域,具体涉及一种高空作业装置。
背景技术:
2.现有的高空作业为用安全绳吊拉高空作业人员,在玻璃幕墙上进行清洗等高空工作。但工作过程中,当有风力等外力干扰时,高空作业人员会因没有有效固定而摆动,影响正常工作,严重时甚至会影响作业人员的安全。除此之外,高空作业人员在作业时仅凭安全绳对身体施加拉力,脚部没有可踩踏的支撑点,高空作业人员悬挂在高空中进行作业时会非常难受。
3.综上所述,急需一种高空作业装置以解决现有技术中存在的问题。
技术实现要素:
4.本实用新型目的在于提供一种高空作业装置,以解决高空作业时作业人员的位置固定问题。
5.为实现上述目的,本实用新型提供了一种高空作业装置,包括踏板组件、连接组件和至少一组吸盘组件;所述连接组件包括连接架,所述吸盘组件连接在所述连接架的一侧,所述踏板组件铰接在所述连接架的另一侧;
6.所述连接组件还包括设置在连接架靠近踏板组件的一侧的滑动件;所述滑动件与所述连接架滑动连接;所述踏板组件靠近连接架的一侧设有与滑动件配合的驱动件,通过所述驱动件的转动带动滑动件沿连接架的长度方向滑动;
7.所述吸盘组件包括吸盘主体和与吸盘主体连接的拉杆;所述滑动件上设有凸出部,所述拉杆上设有用于与所述凸出部接触的滚动件,通过所述凸出部挤压所述滚动件将拉杆拔起,使吸盘主体完成吸附。
8.优选的,所述驱动件与所述连接架铰接,所述驱动件与踏板组件的踏板主体连接,所述踏板主体与驱动件一起绕驱动件与连接架的铰接点转动。
9.优选的,所述驱动件为齿轮,所述滑动件上设有与所述驱动件配合的齿条。
10.优选的,所述滑动件上还设有凹陷的定位部,使所述滚动件越过所述凸出部后卡在所述定位部内。
11.优选的,所述凸出部凸出于所述定位部1mm~2mm。
12.优选的,所述拉杆的轴线垂直于连接架的长度方向。
13.优选的,所述踏板组件的踏板主体上设有安全插销,所述安全插销滑动连接于所述踏板主体上;所述连接架上设有与所述安全插销配合的销孔。
14.优选的,所述踏板组件的踏板主体的底部设有斜支撑。
15.优选的,所述踏板组件的踏板主体上设有绑带。
16.优选的,所述滚动件为滚动轴承。
17.应用本实用新型的技术方案,具有以下有益效果:
18.(1)本实用新型中,通过将踏板组件和吸盘组件通过连接组件连接,在踏板组件与连接组件之间设置相互配合的驱动件和滑动件,通过踏板组件转动带动驱动件转动,从而使滑动件沿连接架长度方向滑动,滑动件上设置用于拔起拉杆的凸出部,实现吸盘组件对玻璃幕墙的吸附,能实现高空作业人员作业时的位置固定,同时通过踏板组件对作业人员进行一定的支撑,提升作业人员高空作业时的舒适感。
19.(2)本实用新型中,驱动件与踏板主体连接,驱动件与连接架铰接,当踏板主体随作业人员的脚转动时,能带动驱动件旋转,从而推动滑动件运动。
20.(3)本实用新型中,驱动件为齿轮,滑动件上设有与齿轮配合的齿条,能将踏板主体和驱动件的旋转运动转化为滑动件的直线滑动,通过滑动件的凸出部实现对拉杆的接触挤压,使吸盘组件的吸附与释放简单易操作,通过作业人员的脚下踩或上抬即可。
21.(4)本实用新型中,通过在滑动件上设置凹陷的定位部,使滚动件越过凸出部后卡在所述定位部内,能给作业人员传递一个吸盘组件已经完成吸附的触感信号,可以开始进行高空作业。
22.(5)本实用新型中,拉杆的轴线垂直于连接架的长度方向,能通过滑动件在竖直方向的滑动将拉杆拔起,拉杆沿水平方向运动,使吸盘主体内部形成真空腔体,完成吸附。
23.(6)本实用新型中,踏板组件的踏板主体上设有安全插销,安全插销滑动连接于踏板主体上;连接架上设有与安全插销配合的销孔,当作业人员感受到吸盘组件已经完成吸附的触感信号,拨动安全插销,使安全插销的一端插入连接架的销孔中,实现踏板主体与连接架的位置固定,避免工作过程中因作业人员误抬脚导致滑动件滑动,使吸盘组件的吸附失效。
24.(7)本实用新型中,通过在踏板组件的踏板主体的底部设置斜支撑,斜支撑的一端与踏板主体固定连接,斜支撑的另一端抵靠在连接架上,使踏板主体处于水平状态,便于对作业人员提供固定支撑。
25.除了上面所描述的目的、特征和优点之外,本实用新型还有其它的目的、特征和优点。下面将参照图,对本实用新型作进一步详细的说明。
附图说明
26.构成本技术的一部分的附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
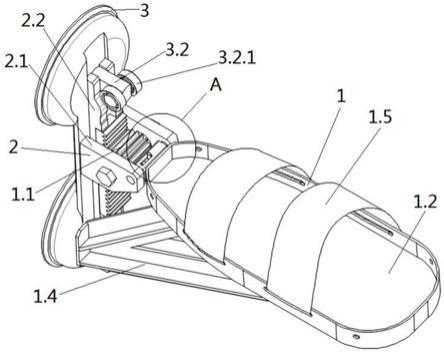
27.图1是本技术实施例中一种高空作业装置的结构示意图;
28.图2是本技术实施例中一种高空作业装置的剖视图;
29.图3是本技术实施例中一种高空作业装置的侧视图;
30.图4是本技术实施例中凸出部与滚动件接触的示意图;
31.图5是本技术实施例中定位部与滚动件接触的示意图;
32.图6是图1中a部分的细节放大图;
33.其中,1、踏板组件,1.1、驱动件,1.2、踏板主体,1.3、安全插销,1.4、斜支撑,1.5、绑带,2、连接组件,2.1、连接架,2.1.1、销孔,2.2、滑动件,2.2.1、凸出部,2.2.2、定位部,3、吸盘组件,3.1、吸盘主体,3.2、拉杆,3.2.1、滚动件。
具体实施方式
34.以下结合附图对本实用新型的实施例进行详细说明,但是本实用新型可以根据权利要求限定和覆盖的多种不同方式实施。
35.实施例1:
36.参见图1至图6,一种高空作业装置,本实施例应用于高空作业时固定作业人员的位置。
37.一种高空作业装置,包括踏板组件1、连接组件2和至少一组吸盘组件3;参见图1,所述连接组件2包括连接架2.1,所述吸盘组件3连接在所述连接架2.1的一侧,所述踏板组件1铰接在所述连接架2.1的另一侧;
38.所述连接组件2还包括设置在连接架2.1靠近踏板组件1的一侧的滑动件2.2;所述滑动件2.2与所述连接架2.1滑动连接;所述踏板组件1靠近连接架2.1的一侧设有与滑动件2.2配合的驱动件1.1,通过所述驱动件1.1的转动带动滑动件2.2沿连接架2.1的长度方向滑动;
39.所述吸盘组件3包括吸盘主体3.1和与吸盘主体3.1连接的拉杆3.2;所述滑动件2.2上设有凸出部2.2.1,所述拉杆3.2上设有用于与所述凸出部2.2.1接触的滚动件3.2.1,通过所述凸出部2.2.1挤压所述滚动件3.2.1将拉杆3.2拔起,使吸盘主体3.1完成吸附。如图3所示,凸出部2.2.1的一侧设有斜坡,便于滑动件2.2沿连接架2.1的长度方向滑动对滚动件3.2.1进行挤压时,滚动件3.2.1沿凸出部2.2.1一侧的斜坡滚动,将拉杆3.2向右拔起,使吸盘主体3.1内部形成真空腔体,将吸盘组件3吸附在玻璃幕墙或墙面上。吸盘组件3参照现有技术中的抽拉式吸盘进行设计,本实施例中,吸盘组件3的外壳与连接架2.1集成在一起。
40.本实施例中,两个吸盘组件3连接在连接架2.1的一侧,用以增强高空作业装置的吸附稳定性,滑动件2.2上设有两个凸出部2.2.1,用以对两个吸盘组件3的拉杆3.2进行接触挤压,如图2所示。
41.所述滚动件3.2.1为滚动轴承,能减少滑动件2.2与滚动件3.2.1之间的摩擦力。
42.所述驱动件1.1与所述连接架2.1铰接,所述驱动件1.1与踏板组件1的踏板主体1.2固定连接,驱动件1.1与踏板主体1.2一起绕驱动件1.1与连接架2.1的铰接点转动,如图2所示;所述踏板组件1的踏板主体1.2上设有绑带1.5,能将作业人员的脚与踏板主体1.2进行固定,当踏板主体1.2随施工人员的脚转动时会带动驱动件1.1旋转,驱动件1.1驱动滑动件2.2沿连接架2.1的长度方向滑动。
43.本实施例中,如图2所示,所述驱动件1.1为齿轮,所述滑动件2.2上设有与所述驱动件1.1配合的齿条,通过齿轮的旋转,使带齿条的滑动件2.2沿竖直方向滑动,实现吸盘组件3的吸附与释放。
44.参见图4和图5,所述滑动件2.2上还设有凹陷的定位部2.2.2,使所述滚动件3.2.1越过所述凸出部2.2.1后卡在所述定位部2.2.2内,能给作业人员传递一个吸盘组件3已经完成吸附的触感信号,可以开始进行高空作业。
45.所述凸出部2.2.1凸出于所述定位部2.2.2,凸出距离为1mm~2mm,当凸出距离小于1mm时,滚动件3.2.1卡在定位部2.2.2内的触感信号不明显;当凸出距离大于2mm时,由于拉杆回缩距离太长,可能会影响吸盘组件3的吸附。在装配该高空作业装置时应注意齿轮与
齿条的啮合位置,使得滚动件3.2.1卡在定位部2.2.2内时,踏板主体1.2垂直于连接架2.1。
46.所述拉杆3.2的轴线垂直于连接架2.1的长度方向,能通过滑动件2.2在竖直方向的滑动将拉杆3.2拔起,拉杆3.2沿水平方向向右运动,使吸盘主体3.1内部形成真空腔体。
47.所述踏板组件1的踏板主体1.2上设有安全插销1.3,所述安全插销1.3滑动连接于所述踏板主体1.2上;所述连接架2.1上设有与所述安全插销1.3配合的销孔2.1.1,如图6所示,当作业人员感受到吸盘组件3已经完成吸附的触感信号,拨动安全插销1.3,使安全插销1.3的一端插入连接架2.1的销孔2.1.1中,实现踏板主体1.2与连接架2.1的相对位置固定,避免工作过程中因作业人员误抬脚导致滑动件2.2向下滑动,使吸盘组件3的吸附失效。
48.所述踏板组件1的踏板主体1.2的底部设有斜支撑1.4,所述斜支撑1.4的一端与踏板主体1.2固定连接,斜支撑1.4的另一端抵靠在连接架2.1上,使踏板主体1.2处于水平状态,便于对作业人员提供固定支撑。
49.上述的一种高空作业装置的使用方法如下:作业人员通过绑带1.5将脚与踏板主体1.2固定连接,作业人员在捆绑安全绳后,将作业人员吊拉至高空作业的玻璃幕墙外,到达作业地点后,将脚上固定的高空作业装置靠近玻璃幕墙,使吸盘组件3贴紧在玻璃幕墙上;作业人员将脚向下踩,使踏板主体1.2和驱动件1.1做顺时针转动,滑动件2.2在驱动件1.1作用下向上运动通过凸出部2.2.1挤压滚动件3.2.1,将吸盘组件3的拉杆3.2拔起,使吸盘组件3吸附在玻璃幕墙上;滚动件3.2.1卡在定位部2.2.2内后,作业人员拨动安全插销1.3,将安全插销1.3插入连接架2.1的销孔2.1.1中,实现踏板主体1.2与连接架2.1之间的位置固定,即可开始高空作业。完成高空作业后,拨动安全插销1.3,使踏板主体1.2与连接架2.1解除固定,作业人员将脚上抬,使踏板主体1.2和驱动件1.1做逆时针转动,滑动件2.2在驱动件1.1作用下向下运动,使拉杆3.2回缩至吸盘组件3内,使吸盘组件3解除吸附,即可移动作业人员的作业位置。
50.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1