一种自动出料及炒菜的智能厨房的制作方法
1.本实用新型涉及智能厨房技术领域,更具体地,涉及一种自动出料及炒菜的智能厨房。
背景技术:
2.目前,随着人们的生活水平的提高和生活节奏的加快,越来越多的现代人不愿意或者没有时间自己烧菜,现有状态通过去餐厅或者外卖的形式解决,但是无论去餐厅还是外卖均存在着食品卫生安全隐患、等待时间长、价格高等缺点,所以智能电饭锅、智能炒菜锅等顺应时代的发展而诞生。
3.但是,理想的情况是,用户只需要通过手机远程设定想要吃的菜品以及用餐时间,到家之后就可以吃到饭菜。智能厨房能够自动的按照人们炒菜的习惯设定食材的添加顺序、火候等。
4.有鉴于此,本实用新型提供一种自动出料及炒菜的智能厨房,用户设定好菜品及烹饪时间,就能够根据需求烹饪出设定的菜品。
技术实现要素:
5.本实用新型的目的在于,提供一种自动出料及炒菜的智能厨房,用户设定好菜品及烹饪时间,就能够根据需求烹饪出设定的菜品。
6.一种自动出料及炒菜的智能厨房,包括:自动出料装置1和自动炒菜装置 2,自动炒菜装置2设置在自动出料装置1的侧边,所述自动出料装置1包括:面板11、净菜盒组件12、接料槽组件13、传动组件14、进锅升降组件15,所述净菜盒组件12、接料槽组件13、传动组件14和锅升降组件15设置在面板11内,净菜盒组件12设置在自动出料装置1内部的前部,传动组件14靠近自动出料装置1的背板,接料槽组件13设置在净菜盒组件12和传动组件 14之间,进锅升降组件15设置在接料槽组件13的左侧、或/和右侧,净菜盒组件12有多个净菜盒121,净菜盒121用于盛装食材,当用户设定好菜品及烹饪时间,自动出料装置1的系统控制自动出料装置1按照程序出菜到自动炒菜装置2的智能炒锅21中,其中,哪个净菜盒121需要出食材,系统控制传动组件14为相应的净菜盒121的第一螺旋轴1211提供旋转的机械能,第一螺旋轴1211旋转将食材向后推出,接料槽组件13接住食材并且将食材从左侧或者右侧推出到进锅升降组件15的出菜槽151,出菜槽151运动到面板11的出菜口111对应的位置,出菜口111打开,出菜槽151将食材推出到自动炒菜装置2的智能炒锅21中,所述智能炒锅21为球形或椭球形双层结构,双层结构内注入高温导热油为食材烹饪提供热量,智能炒锅21自旋转对内部的食材进行搅拌,自动炒菜装置2的调味料添加装置22给智能炒锅21 中添加调味料。
7.在一些实施方式中,面板11包括:前板112、左板、右板114和背板,分别设置在自动出料装置1的前方、左方、右方和后方,前板112、左板、右板114和背板中的一个或者多个设置有出菜口111,当进锅升降组件15设置在接料槽组件13的左侧,能够将食材从前板112、左
板和背板的出菜口111 推出到自动炒菜装置2的智能炒锅21中,当进锅升降组件15设置在接料槽组件13的右侧,能够将食材从前板112、右板114和背板的出菜口111推出到自动炒菜装置2的智能炒锅21中。
8.进一步优选的,左板或者右板114上设置有出菜口111,自动炒菜装置2 设置在自动出料装置1的左边或者右边。
9.进一步的,前板112上还设置有操作显示器116,面板11中还设置有保温层。
10.在一些实施方式中,净菜盒组件12有多个,一个净菜盒组件12设置为一层,一个净菜盒组件12与一个接料槽组件13配置,一个净菜盒组件12有多个净菜盒121,净菜盒121用于盛装不同种类的、干净的食材。
11.进一步优选的,净菜盒组件12有2
‑
8个,即净菜盒组件12有2
‑
8层,优选的,净菜盒组件12有4
‑
6个;一个净菜盒组件12有2
‑
14个净菜盒121,优选的,一个净菜盒组件12有4
‑
10个净菜盒121,净菜盒121分为放菜净菜盒122和放香辛葱蒜净菜盒123。
12.进一步的,净菜盒121还包括:轴心定位座1212、净菜盒上部1213和净菜盒下部1214,食材放置在净菜盒121内部,第一螺旋轴1211设置在净菜盒下部1214内部并向后延伸到净菜盒下部1214的外部,第一螺旋轴1211旋转,将食材向后推出。
13.进一步的,轴心定位座1212位于净菜盒121后端,第一螺旋轴1211的后端穿过轴心定位座1212的一部分,轴心定位座1212的另一部分与净菜盒上部1213固定,轴心定位座1212起到控制第一螺旋轴1211不偏倚的作用。
14.进一步的,每个净菜盒121设置有定位锁扣124和移出位锁扣125,定位锁扣124用于将净菜盒121固定,将定位锁扣124拨动后,才能取出净菜盒 121,净菜盒121推进时,定位锁扣124和移出位锁扣125自动回位。
15.进一步的,每个净菜盒121还设置有拉手板126,通过拉动拉手板126方便将净菜盒121拉出或者推进。
16.在一些实施方式中,接料槽组件13包括:接料槽131、第二螺旋轴132、驱动电机133、较重单向气缸134、称重传感器135、安装支架136和翘板137,净菜盒121将食材向后推出,接料槽131正好接住食材,驱动电机133为第二螺旋轴132提供旋转的机械能,第二螺旋轴132旋转将食材从左侧或者右侧推出,进锅升降组件15的出菜槽151正好接住食材。
17.进一步的,接料槽131的边沿设置有较大的半圆形缺口1311和较小的半圆形缺口1312,净菜盒下部1214的后端设置在较大的半圆形缺口1311内,第一螺旋轴1211的尾端设置在较小的半圆形缺口1312内,因此,第一螺旋轴 1211旋转将食材向后推出时,接料槽131能够正好接住食材。
18.进一步的,第二螺旋轴132设置在接料槽131的下方内部,驱动电机133 与第二螺旋轴132的左端或者右端连接,并且设置在接料槽131的左外侧或者右外侧,安装支架136横跨设置在接料槽131的上端,较重单向气缸134 通过安装支架136固定设置在接料槽131的边沿上,称重传感器135设置在接料槽131的底部两端,哪个净菜盒121开始出菜,相对应的称重单向气缸 134启动,称重单向气缸134向下运动,向下压住翘板137的右端,使得翘板137的左边向上翘起,从而向上挑起净菜盒121的壳体的后端,第一螺旋轴1211旋转将食材向后推出,翘板137将食材的重量传递到称重传感器135,实现称重;当接料槽131内的食材重量达到系统设定重量后,称重传感器135 发出信号,系统控制传动组件14的单向气缸147
停止工作,净菜盒121停止出菜,称重单向气缸134停止启动,称重单向气缸134向上恢复原位,翘板 137的左边向下恢复原位,净菜盒121的壳体恢复原位。
19.进一步的,净菜盒121停止出菜后,驱动电机133为第二螺旋轴132提供机械能,第二螺旋轴132旋转将食材向左或者向右推出。
20.进一步的,第二螺旋轴132上设置有多个小孔,能够将水从小孔中喷出,起到清洗食材及接料槽131的作用。
21.进一步的,净菜盒组件12的下方设置有废水接收盘16,用于收集废水。
22.在一些实施方式中,传动组件14包括:动力电机141、同步带张紧板142、皮带、前安装板144、后安装板145、传动装置146、和单向气缸147,动力电机141、同步带张紧板142、和单向气缸147设置在后安装板145的背面,传动装置146和皮带设置在前安装板144和后安装板145内部,一个传动装置146与一个净菜盒121和一个单向气缸147对应,传动装置146包括:轴套1461、压轮1462、同步轮1463、离合器安装座1464和弹簧1465,同步轮 1463固定套设在轴套1461上,弹簧1465设置在轴套1461尾端,通过离合器安装座1464将传动装置146安装。
23.进一步的,轴套1461前端与前安装板144齐平、轴套1461的尾端突出到后安装板145以外,动力电机141为皮带提供机械能,动力电机141带动皮带运动,皮带设置在压轮1462和同步轮1463之间,同步带张紧板142起到固定、收紧或放松皮带的作用,一个皮带连接两层同步轮1463,带动两层同步轮1463转动,同步轮1463转动带动轴套1461转动。
24.进一步的,准备出菜时,哪个净菜盒121准备出菜,自动出料装置1的系统程序控制与之相对应的单向气缸147开始工作、单向气缸147向前运动,单向气缸147插入轴套1461的尾端内卡合,使轴套1461向前运动、弹簧1465 压缩,并使得相应的净菜盒121的第一螺旋轴1211的尾端插入轴套1461的首端内卡合,轴套1461的首端内设三角凸点,轴套1461转动带动第一螺旋轴1211旋转,将食材向后推出。
25.进一步的,当接料槽131内的食材重量达到系统设定重量后,称重传感器135发出信号,系统控制单向气缸147停止工作,由于弹簧1465的回弹力使得单向气缸147与轴套1461脱离、轴套1461恢复原位、第一螺旋轴1211与轴套1461脱离,第一螺旋轴1211失去机械能停止旋转,净菜盒121停止出菜。
26.在一些实施方式中,进锅升降组件15还包括:第三螺旋轴、出菜电机153、升降螺杆154、交错气缸155、电动推杆156、升降电机157、微动轴158、和运动轴159,第三螺旋轴设置在出菜槽151内部,出菜电机153为第三螺旋轴提供机械能,出菜电机153与第三螺旋轴的左端或者右端连接并且设置在出菜槽151的左外侧或者右外侧。
27.进一步的,出菜槽151与升降螺杆154和运动轴159连接,升降电机157 带动升降螺杆154向上或者向下运动,电动推杆156带动运动轴159向前或者向后移动、或者向左或者向右旋转90度,交错气缸155带动微动轴158运动,微动轴158带动出菜槽151向左或向右平行小幅度运动。
28.进一步的,出菜槽151的边沿设置有一个半圆形缺口1511,出菜槽151开始接菜时,升降电机157工作出菜槽151上下运动到接料槽131对应的位置,此时,接料槽131的尾部正好在半圆形缺口1511内,出菜槽151能够正好接住食材;
29.进一步的,出菜槽151接菜完成后,升降电机157带动升降螺杆154向上运动,致使
出菜槽151向上运动到出菜口111对应的位置,出菜口111打开,电动推杆156运动,带动运动轴159运动,致使出菜槽151向前后移动、或者向左右旋转90度,出菜电机153工作,第三螺旋轴旋转将食材推出到智能锅。
30.在一些实施方式中,所述自动出料装置1还包括配电箱17和制冷组件18,配电箱17设置在自动出料装置1的上部,制冷组件18的压缩机设置在自动出料装置1的下部,冷凝管设置在净菜盒组件12盒体的外面,制冷组件18 控制自动出料装置1内部的温度为
‑
2℃~1℃,优选的,制冷组件18控制自动出料装置1内部的温度为0℃
±
0.5℃。
31.在一些实施方式中,智能炒锅21包括:炒锅主体211、锅盖212、第一电机213、第二电机214和喷头216,打开锅盖212,自动出料装置1将食材加入到炒锅主体211中,通过第一电机213带动炒锅主体211沿着炒锅主体211 中心轴的方向发生自体旋转,通过第二电机214带动炒锅主体211在z轴方向发生旋转。
32.进一步的,智能炒锅21还包括拨盘组件215,拨盘组件215带动炒锅主体 211在xy平面旋转,通过拨盘组件215使得炒锅主体211的出口与盘子对准,并且装盘时食材不会飞溅。
33.进一步的,调味料添加装置22包括液体调味料添加装置221和粉末调味料添加装置222,液体调味料添加装置221通过管道连接喷头216向炒锅主体211内添加液体调味料,粉末调味料添加装置222通过管道连接喷头216向炒锅主体211内添加粉末状调味料。
附图说明
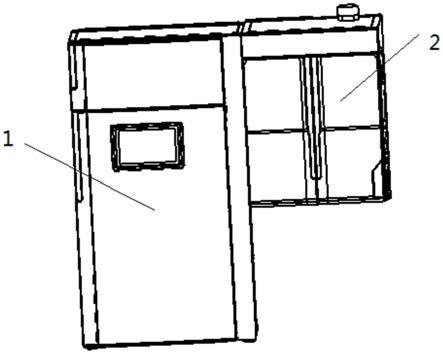
34.图1为本技术实施例1的自动出料及炒菜的智能厨房的立体图。
35.图2为本技术实施例1的自动出料装置的立体图。
36.图3为本技术实施例1的自动出料装置的爆炸图。
37.图4为本技术实施例1的净菜盒组件和接料槽组件的主视图。
38.图5为本技术实施例1的净菜盒的立体图。
39.图6为本技术实施例1的净菜盒组件和接料槽组件的立体图。
40.图7为本技术实施例1的接料槽组件的立体图。
41.图8为本技术实施例1的进锅升降组件的立体图。
42.图9为本技术实施例1的传动组件的主视图。
43.图10为本技术实施例1的传动组件的后视图。
44.图11为本技术实施例1的传动组件的分解图。
45.图12为本技术实施例1的传动装置和单向气缸的立体图。
46.图13为本技术实施例1的传动装置去除离合器安装座后的立体图。
47.图14为本技术实施例1的自动炒菜装置2的立体图。
48.主要元件符号说明:
49.自动出料装置1、自动炒菜装置2、面板11、净菜盒组件12、接料槽组件 13、传动组件14、进锅升降组件15、废水接收盘16、配电箱17、制冷组件 18、出菜口111、前板112、右板114、操作显示器116、净菜盒121、放菜净菜盒122、放香辛葱蒜净菜盒123、定位锁扣124、移出位锁扣125、拉手板126、第一螺旋轴1211、轴心定位座1212、净菜盒上部1213、净菜盒下部 1214、接料槽131、第二螺旋轴132、驱动电机133、较重单向气缸134、称重传感器135、安装支
架136、翘板137、较大的半圆形缺口1311、较小的半圆形缺口1312、动力电机141、同步带张紧板142、前安装板144、后安装板 145、传动装置146、单向气缸147、轴套1461、压轮1462、同步轮1463、离合器安装座1464、弹簧1465、出菜槽151、出菜电机153、升降螺杆154、交错气缸155、电动推杆156、升降电机157、微动轴158、运动轴159、半圆形缺口1511、智能炒锅21、炒锅主体211、锅盖212、第一电机213、第二电机214、拨盘组件215、喷头216、调味料添加装置22、液体调味料添加装置221、粉末调味料添加装置222。
具体实施方式
50.描述以下实施例以辅助对本技术的理解,实施例不是也不应当以任何方式解释为限制本技术的保护范围。
51.在以下描述中,本领域的技术人员将认识到,在本论述的全文中,组件可描述为单独的功能单元(可包括子单元),但是本领域的技术人员将认识到,各种组件或其部分可划分成单独组件,或者可整合在一起(包括整合在单个的系统或组件内)。
52.同时,附图内的组件或系统之间的连接并不旨在限于直接连接。相反,在这些组件之间的数据可由中间组件修改、重格式化、或以其它方式改变。另外,可使用另外或更少的连接。还应注意,术语“联接”、“连接”、或“输入”“固定”应理解为包括直接连接、通过一个或多个中间媒介来进行的间接的连接或固定。
53.在本技术的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“侧面”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该申请产品使用时或惯常认知的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。此外,术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解为指示或暗示相对重要性。此外,术语“水平”、“竖直”等术语并不表示要求部件绝对水平或悬垂,而是可以稍微倾斜。如“水平”仅仅是指其方向相对“竖直”而言更加水平,并不是表示该结构一定要完全水平,而是可以稍微倾斜。
54.实施例1:
55.一种自动出料及炒菜的智能厨房,如图1
‑
图14所示,包括:自动出料装置1和自动炒菜装置2,自动炒菜装置2设置在自动出料装置1的右侧边,所述自动出料装置1包括:面板11、净菜盒组件12、接料槽组件13、传动组件14、进锅升降组件15,所述净菜盒组件12、接料槽组件13、传动组件 14和锅升降组件15设置在面板11内,净菜盒组件12设置在自动出料装置1 内部的前部,传动组件14靠近自动出料装置1的背板,接料槽组件13设置在净菜盒组件12和传动组件14之间,进锅升降组件15设置在接料槽组件 13的右侧,净菜盒组件12有多个净菜盒121,净菜盒121用于盛装食材,当用户设定好菜品及烹饪时间,自动出料装置1的系统控制自动出料装置1按照程序出菜到自动炒菜装置2的智能炒锅21中,其中,哪个净菜盒121需要出食材,系统控制传动组件14为相应的净菜盒121的第一螺旋轴1211提供旋转的机械能,第一螺旋轴1211旋转将食材向后推出,接料槽组件13接住食材并且将食材从右侧推出到进锅升降组件15的出菜槽151,出菜槽151运动到面板11的出菜口111对应的位置,出菜口111打开,出菜槽151将食材推出到自动炒菜装置2的智能炒锅21中,所述智能炒锅21为球形或椭球形双层结构,双层结构内注入高温导热油为食材烹饪提供热量,智能炒锅21自旋
转对内部的食材进行搅拌,自动炒菜装置2的调味料添加装置22给智能炒锅21中添加调味料。
56.面板11包括:前板112、左板、右板114和背板,分别设置在自动出料装置1的前方、左方、右方和后方,右板114上的一个出菜口111,进锅升降组件15设置在接料槽组件13的右侧,将食材右板114的出菜口111推出到自动炒菜装置2的智能炒锅21中。前板112上还设置有操作显示器116,面板11中还设置有保温层。
57.净菜盒组件12有多个,一个净菜盒组件12设置为一层,一个净菜盒组件 12与一个接料槽组件13配置,一个净菜盒组件12有多个净菜盒121,净菜盒121用于盛装不同种类的、干净的食材。净菜盒组件12有4个,即净菜盒组件12有4层;第一个净菜盒组件12有4个放菜净菜盒122和4个放香辛葱蒜净菜盒123,第二个至第四个净菜盒组件12有6个放菜净菜盒122。净菜盒121还包括:轴心定位座1212、净菜盒上部1213和净菜盒下部1214,食材放置在净菜盒121内部,第一螺旋轴1211设置在净菜盒下部1214内部并向后延伸到净菜盒下部1214的外部,第一螺旋轴1211旋转,将食材向后推出。轴心定位座1212位于净菜盒121后端,第一螺旋轴1211的后端穿过轴心定位座1212的一部分,轴心定位座1212的另一部分与净菜盒上部1213 固定,轴心定位座1212起到控制第一螺旋轴1211不偏倚的作用。每个净菜盒121设置有定位锁扣124和移出位锁扣125,定位锁扣124用于将净菜盒121固定,将定位锁扣124拨动后,才能取出净菜盒121,净菜盒121推进时,定位锁扣124和移出位锁扣125自动回位。每个净菜盒121还设置有拉手板 126,通过拉动拉手板126方便将净菜盒121拉出或者推进。
58.接料槽组件13包括:接料槽131、第二螺旋轴132、驱动电机133、较重单向气缸134、称重传感器135、安装支架136和翘板137,净菜盒121将食材向后推出,接料槽131正好接住食材,驱动电机133为第二螺旋轴132提供旋转的机械能,第二螺旋轴132旋转将食材从左侧或者右侧推出,进锅升降组件15的出菜槽151正好接住食材。接料槽131的边沿设置有较大的半圆形缺口1311和较小的半圆形缺口1312,净菜盒下部1214的后端设置在较大的半圆形缺口1311内,第一螺旋轴1211的尾端设置在较小的半圆形缺口1312 内,因此,第一螺旋轴1211旋转将食材向后推出时,接料槽131能够正好接住食材。第二螺旋轴132设置在接料槽131的下方内部,驱动电机133与第二螺旋轴132的左端或者右端连接,并且设置在接料槽131的左外侧或者右外侧,安装支架136横跨设置在接料槽131的上端,较重单向气缸134通过安装支架136固定设置在接料槽131的边沿上,称重传感器135设置在接料槽131的底部两端,哪个净菜盒121开始出菜,相对应的称重单向气缸134 启动,称重单向气缸134向下运动,向下压住翘板137的右端,使得翘板137 的左边向上翘起,从而向上挑起净菜盒121的壳体的后端,第一螺旋轴1211 旋转将食材向后推出,翘板137将食材的重量传递到称重传感器135,实现称重;当接料槽131内的食材重量达到系统设定重量后,称重传感器135发出信号,系统控制传动组件14的单向气缸147停止工作,净菜盒121停止出菜,称重单向气缸134停止启动,称重单向气缸134向上恢复原位,翘板137 的左边向下恢复原位,净菜盒121的壳体恢复原位。净菜盒121停止出菜后,驱动电机133为第二螺旋轴132提供机械能,第二螺旋轴132旋转将食材向左或者向右推出。第二螺旋轴132上设置有多个小孔,能够将水从小孔中喷出,起到清洗食材及接料槽131的作用。净菜盒组件12的下方设置有废水接收盘16,用于收集废水。
59.传动组件14包括:动力电机141、同步带张紧板142、皮带、前安装板144、后安装板145、传动装置146、和单向气缸147,动力电机141、同步带张紧板142、和单向气缸147设置在后安装板145的背面,传动装置146和皮带设置在前安装板144和后安装板145内部,一个传动装置146与一个净菜盒 121和一个单向气缸147对应,传动装置146包括:轴套1461、压轮1462、同步轮1463、离合器安装座1464和弹簧1465,同步轮1463固定套设在轴套 1461上,弹簧1465设置在轴套1461尾端,通过离合器安装座1464将传动装置146安装。轴套1461前端与前安装板144齐平、轴套1461的尾端突出到后安装板145以外,动力电机141为皮带提供机械能,动力电机141带动皮带运动,皮带设置在压轮1462和同步轮1463之间,同步带张紧板142起到固定、收紧或放松皮带的作用,一个皮带连接两层同步轮1463,带动两层同步轮1463转动,同步轮1463转动带动轴套1461转动。准备出菜时,哪个净菜盒121准备出菜,自动出料装置1的系统程序控制与之相对应的单向气缸147开始工作、单向气缸147向前运动,单向气缸147插入轴套1461的尾端内卡合,使轴套1461向前运动、弹簧1465压缩,并使得相应的净菜盒121 的第一螺旋轴1211的尾端插入轴套1461的首端内卡合,轴套1461的首端内设三角凸点,轴套1461转动带动第一螺旋轴1211旋转,将食材向后推出。当接料槽131内的食材重量达到系统设定重量后,称重传感器135发出信号,系统控制单向气缸147停止工作,由于弹簧1465的回弹力使得单向气缸147 与轴套1461脱离、轴套1461恢复原位、第一螺旋轴1211与轴套1461脱离,第一螺旋轴1211失去机械能停止旋转,净菜盒121停止出菜。进锅升降组件 15还包括:第三螺旋轴、出菜电机153、升降螺杆154、交错气缸155、电动推杆156、升降电机157、微动轴158、和运动轴159,第三螺旋轴设置在出菜槽151内部,出菜电机153为第三螺旋轴提供机械能,出菜电机153与第三螺旋轴的左端或者右端连接并且设置在出菜槽151的左外侧或者右外侧。出菜槽151与升降螺杆154和运动轴159连接,升降电机157带动升降螺杆 154向上或者向下运动,电动推杆156带动运动轴159向前或者向后移动、或者向左或者向右旋转90度,交错气缸155带动微动轴158运动,微动轴 158带动出菜槽151向左或向右平行小幅度运动。出菜槽151的边沿设置有一个半圆形缺口1511,出菜槽151开始接菜时,升降电机157工作出菜槽151 上下运动到接料槽131对应的位置,此时,接料槽131的尾部正好在半圆形缺口1511内,出菜槽151能够正好接住食材;出菜槽151接菜完成后,升降电机157带动升降螺杆154向上运动,致使出菜槽151向上运动到出菜口111 对应的位置,出菜口111打开,电动推杆156运动,带动运动轴159运动,致使出菜槽151向前后移动、或者向左右旋转90度,出菜电机153工作,第三螺旋轴旋转将食材推出到智能锅。所述自动出料装置1还包括配电箱17和制冷组件18,配电箱17设置在自动出料装置1的上部,制冷组件18的压缩机设置在自动出料装置1的下部,冷凝管设置在净菜盒组件12盒体的外面,制冷组件18控制自动出料装置1内部的温度为
‑
2℃~1℃,优选的,制冷组件 18控制自动出料装置1内部的温度为0℃
±
0.5℃。
60.智能炒锅21包括:炒锅主体211、锅盖212、第一电机213、第二电机214 和喷头216,打开锅盖212,自动出料装置1将食材加入到炒锅主体211中,通过第一电机213带动炒锅主体211沿着炒锅主体211中心轴的方向发生自体旋转,通过第二电机214带动炒锅主体211在z轴方向发生旋转。智能炒锅21还包括拨盘组件215,拨盘组件215带动炒锅主体211在xy平面旋转,通过拨盘组件215使得炒锅主体211的出口与盘子对准,并且装盘时食材不会飞溅。调味料添加装置22包括液体调味料添加装置221和粉末调味料添加装置222,液体调味料添
加装置221通过管道连接喷头216向炒锅主体211 内添加液体调味料,粉末调味料添加装置222通过管道连接喷头216向炒锅主体211内添加粉末状调味料。
61.尽管本技术已公开了多个方面和实施方式,但是其它方面和实施方式对本领域技术人员而言将是显而易见的,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。本技术公开的多个方面和实施方式仅用于举例说明,其并非旨在限制本技术,本技术的实际保护范围以权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1