烹饪器具的制作方法
1.本实用新型总地涉及烹饪器具。
背景技术:
2.已知有部分烹饪器具设计有下米装置,该下米装置可以自动向烹饪器具的内锅中下米,以方便烹饪。但是现有的烹饪器具的下米装置结构较为复杂,并且在烹饪器具中占用空间较大,使得烹饪器具体积庞大。
3.因此,需要一种烹饪器具,以至少部分地解决相关技术中存在的问题。
技术实现要素:
4.在实用新型内容部分中引入了一系列简化形式的概念,这将在具体实施方式部分中进一步详细说明。本实用新型的实用新型内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
5.为至少部分地解决上述问题,本实用新型提供一种烹饪器具,所述烹饪器具包括:
6.机体组件,所述机体组件上设置有底座,所述机体组件包括:
7.储料机构,所述储料机构包括储料仓,所述储料仓具有侧向的出口;以及
8.送料机构,所述送料机构包括送料仓,所述送料仓具有进料口和出料口,所述进料口设置在所述送料仓的侧壁上,所述进料口能够与所述出口连通,以使所述储料仓中的物料经由所述送料仓进入所述烹饪器具的烹饪空间中;以及
9.锅体组件,所述锅体组件可坐设于所述底座上,所述烹饪空间位于所述锅体组件的内部。
10.根据本实用新型的烹饪器具通过在储料仓上设置侧向出口,并将进料口设置在送料仓的侧壁上,可以实现出口和进料口的侧向对接和连通,由此可以使烹饪器具的结构更紧凑。
11.可选地,所述送料机构还包括驱动装置,所述驱动装置能够驱动所述送料仓在第一位置和第二位置之间移动,其中当所述送料仓在所述第一位置时,所述送料仓与所述出口以及所述烹饪空间不连通,当所述送料仓在所述第二位置时,所述送料仓与所述出口以及所述烹饪空间连通。该方案通过使驱动装置驱动送料仓在第一位置和第二位置之间移动,可以实现送料仓的自动化移动,从而可以节省人力。
12.可选地,所述储料仓设置在所述锅体组件的上方,且所述送料仓沿竖直方向在所述第一位置和第二位置之间可移动。该方案可以使得当进行进料操作时将送料仓移至下方的第二位置,使得进料口与储料仓的出口连通;当不进行进料操作时将其移至上方的第一位置,使其大致位于储料仓的侧方,从而可以节省烹饪器具的高度,使烹饪器具在高度方向上的结构更紧凑。
13.可选地,当所述送料仓处于所述第二位置时,所述进料口的下边缘位于所述出口
的下端面的下方,且所述进料口的上边缘位于所述出口的上端面和下端面之间。该方案可以避免存米死角的存在,并且可以防止物料泄漏到机体内部。
14.可选地,所述烹饪器具还包括位置检测装置,所述位置检测装置与所述驱动装置电连接,所述位置检测装置能够检测所述送料仓的位置,且所述位置检测装置配置为当检测到所述送料仓处于所述第一位置和所述第二位置时向所述驱动装置发送信号,以使所述驱动装置停止驱动所述送料仓移动。该方案可以保证送料仓精确地停止在第一位置和第二位置。
15.可选地,所述位置检测装置包括上下间隔设置的第一光耦板和第二光耦板,所述送料仓上设置有延伸部,当所述延伸部穿过所述第一光耦板时,所述位置检测装置判断所述送料仓到达所述第一位置,当所述延伸部穿过所述第二光耦板时,所述位置检测装置判断所述送料仓到达所述第二位置。该方案便于实现并且检测的准确率高。
16.可选地,所述烹饪器具还包括控制装置,所述控制装置配置为至少基于送料的时长t、送料的速度v以及连通口的有效面积s确定流经所述连通口的落料量,所述连通口为在所述送料仓位于所述第二位置时在所述进料口与所述出口的连通处形成的可供物料经过的面积最小的口。该方案可以准确有效地计算出落料量。
17.可选地,所述落料量还与误差修正因子x相关,其中落料量=s*vt+x,
18.其中,t为所述送料仓处于所述第二位置的时长;v=v0+gt,v0为落米初始速度,且v0为0~10m/s,g为重力加速度;x为从所述送料仓的延伸部穿过所述第一光耦板开始至穿过所述第二光耦板又立即返回至穿过所述第一光耦板期间流经所述连通口的落料量。该方案可以进一步准确地计算出落料量。
19.可选地,所述送料仓处于所述第二位置的时长为所述延伸部穿过所述第二光耦板开始至所述延伸部脱离所述第二光耦板为止的时长。该方案可以进一步准确地计算出落料量。
20.可选地,所述出口具有第一周向延伸长度l1,所述进料口具有第二周向延伸长度l2,所述第一周向延伸长度l1小于所述第二周向延伸长度l2。该方案可以保证从出口中的落出的物料都能经由进料口落入送料仓中,避免物料漏到机体中而影响机体的正常运行。
21.可选地,有效面积s=l1*b,其中b为所述进料口的上边缘与所述出口的下端面之间的最短距离。该方案可以进一步准确地计算出落料量。
附图说明
22.本实用新型实施方式的下列附图在此作为本实用新型的一部分用于理解本实用新型。附图中示出了本实用新型的实施方式及其描述,用来解释本实用新型的原理。在附图中,
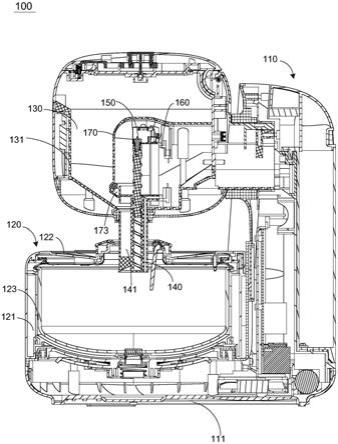
23.图1为根据本实用新型的一个优选实施方式的烹饪器具的截面示意图,其中送料仓处于第一位置;
24.图2为图1中所示的烹饪器具的另一个截面示意图,其中送料仓处于第二位置;
25.图3为图1中所示的烹饪器具的分解立体图;
26.图4为图1中所示的烹饪器具的送料仓的立体示意图;
27.图5为图1中所示的烹饪器具的送料仓的纵向截面示意图;
28.图6为图1中所示的烹饪器具的送料仓的平面示意图;
29.图7为图1中所示的烹饪器具的送料仓的横向截面示意图;
30.图8为图2中所示的烹饪器具的储料仓和送料仓在配合状态下的纵向截面图;
31.图9为图2中所示的烹饪器具的储料仓和送料仓在配合状态下的横向截面图;
32.图10为图1中所示的烹饪器具的一部分的截面示意图,其中送料仓的进料口的下边缘抵接至缓冲件;以及
33.图11-图13为图1中所示的烹饪器具的缓冲件的不同视角的示意图。
具体实施方式
34.在下文的描述中,给出了大量具体的细节以便提供对本实用新型更为彻底的理解。然而,对于本领域技术人员来说显而易见的是,本实用新型实施方式可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本实用新型实施方式发生混淆,对于本领域公知的一些技术特征未进行描述。
35.为了彻底了解本实用新型实施方式,将在下列的描述中提出详细的结构。显然,本实用新型实施方式的施行并不限定于本领域的技术人员所熟习的特殊细节。
36.本实用新型提供了一种烹饪器具。根据本实用新型的烹饪器具可以为电饭煲、电压力锅或其他的烹饪器具,并且根据本实用新型的烹饪器具除具有煮米饭的功能以外,还可以具有煮粥、煲汤、炒菜等各种功能。下面结合附图对本实用新型的优选实施方式进行说明。
37.根据本实用新型的优选实施方式的烹饪器具100为分体式烹饪器具。下面将结合附图对本实用新型的烹饪器具100进行详细地阐述。
38.参考图1-图3,烹饪器具100包括机体组件110和锅体组件120。机体组件110的底部具有底座111,锅体组件120能够被放置在底座111上并且可以从底座111上取下,以便于将锅体组件120放置在任何期望的位置处,例如餐桌上。
39.锅体组件120包括煲体121、设置在煲体121中的内锅123和锅盖构件 122。煲体121可分离地坐设于底座111上。内锅123可取出地放置在煲体121 中,当锅盖构件122盖合至煲体121时,锅盖构件122与内锅123之间形成烹饪空间。
40.底座111上通常设置有加热装置(未示出)以及为加热装置供电的供电模块。当锅体组件120放置在底座111上时供电模块可以向加热装置供电,使得加热装置可以对煲体中的内锅123进行加热。在一个优选实施方式中,加热装置为电磁加热,示例性地,加热装置可以包括线圈盘和盘绕在线圈盘上的线圈,以使得当通电时,加热装置可以产生热量以加热内锅123。可以理解,在未示出的其他实施方式中,加热装置也可以配置为其他结构,例如电热丝加热等。示例性地,该供电模块可以为与外界电源相适配的插头,插头插接后可以为加热装置供电,供电模块也可以配置为容置在底座111中的电池。
41.进一步参考图1和图2,机体组件110中还设置有储料机构130和送料机构140。储料机构130包括储料仓131,储料仓131中可以储存大米、小米等食材。储料仓131具有由第一端部132(参照图10)和位于第一端部132 上方的第二端部133(参照图10)形成的侧向出口134,也就是说,该出口 134设置在储料仓131的侧面,以便于储料仓131中的物料经由出口134流出。在图示实施方式中,该出口134设置在储料仓131的下部,从而可以进一步便于储
料仓131中的物料通过重力作用从出口134流出。
42.如图3-图5所示,送料机构140包括送料仓141,送料仓141具有进料口142、设置在进料口142之下的出料口143和设置于进料口142和出料口 143之间的沿竖直方向延伸的进料通道144。进料口142和出料口143均设置在送料仓141的侧壁上。当在进料状态下(下文描述)时,进料口142能够与储料仓131的出口134连通,出料口143能够与内锅中的烹饪空间连通,以使储料仓131中的物料经由进料口142进入送料仓141,再经由出料口143 进入烹饪器具的烹饪空间中。送料仓141大致构造为柱状结构,且进料口142 和出料口143为沿送料仓141的周向方向延伸的弧形开口。
43.为了将物料均匀地散在烹饪空间中,如图5和图6所示,送料仓141在进料通道144的底部还设置有导向面145,导向面145从上到下沿朝向出料口143的方向向外倾斜。导向面145的上端连接至螺旋柱151(下文描述) 外壁,下端连接至送料仓141的底壁。优选地,导向面145构造为锥形斜面。
44.进一步优选地,导向面145相对于水平面的倾斜角度a为10
°
~80
°
。示例性地,该倾斜角度a可以为20
°
、40
°
、60
°
或70
°
等,本领域的技术人员可以根据实际需要进行设置。导向面145的设置可以对物料起到引流分散的作用,使食材尽可能均匀地分布在烹饪空间中,从而可以避免米饭堆积而造成夹生。
45.如图7和图8所示,进料通道144中还设置有至少一个沿进料方向延伸的导向筋146,以将进料通道144分隔成至少两个小通道。该方案可以便于将物料分流,避免其堆积在一个方向上而造成米饭夹生。在图示实施方式中,进料通道144中设置有一个导向筋146,其将进料通道144分隔成两个小通道。可以理解,在未示出的其他实施方式中,也可以在进料通道144中设置其他数量的导向筋146。导向筋146连接在螺旋柱151(下文描述)和送料仓 141的内壁之间。优选地,如图8所示,导向筋146连接在进料通道144的下方。该方案可以节省材料、降低成本。
46.优选地,如图9所示,储料仓131的出口134也构造为与进料口142配合的弧形的开口,且具有第一周向延伸长度l1,进料口142具有第二周向延伸长度l2,第一周向延伸长度l1小于第二周向延伸长度l2。该方案可以保证从出口134中的落出的物料都能经由进料口142落入送料仓141中,避免物料漏到机体组件中而影响机体组件的正常运行。进一步优选地,进料口142 的高度b大于或等于3mm(如图6所示),且第二周向延伸长度l2大于或等于3mm。
47.进一步参考图1-图3,送料机构140还包括驱动装置150,驱动装置150 能够驱动送料仓141在第一位置和第二位置之间移动。如图1所示,当送料仓141在第一位置时,送料仓141在机体组件中位于上方,送料仓141与出口134以及烹饪空间均不连通;如图2所示,当送料仓141在第二位置时,送料仓141在机体组件中位于下方,送料仓141与出口134以及烹饪空间连通,以使储料仓131中的物料经由出口134进入送料仓141,再经由出料口 143进入烹饪器具的烹饪空间中。
48.如图3和图5所示,在图示实施方式中,驱动装置150包括电机152和与电机152连接的螺杆153,送料仓141中设置有与螺杆153配合的螺旋柱 151。电机152可在通电时驱动螺杆153转动,螺杆153与螺旋柱151配合,从而当螺杆153转动时,送料仓141可上下移动。具体地,当电机152驱动螺杆153正向转动时可带动送料仓141向下运动至第二位置,当送料仓
141 处于第二位置时,进料口142的下边缘位于出口134的下端面(即第一端部 132)的下方,且进料口142的上边缘位于出口134的上端面(即第二端部 133)和下端面之间。该方案可以避免储料仓131向送料仓141进米时存在存米死角,并且可以防止物料泄漏到机体组件内部而影响机体组件的正常运行。当完成下米后,电机152可驱动螺杆153反向转动从而可带动送料仓141向上运动至第一位置。
49.如图1-图3所示,烹饪器具还包括位置检测装置160,位置检测装置160 与驱动装置150电连接。位置检测装置160能够检测送料仓141在机体组件中的位置。当位置检测装置160检测到送料仓141处于第一位置和第二位置时可向驱动装置150发送信号,以使驱动装置150停止驱动送料仓141移动。该方案可以保证送料仓141精确地停止在第一位置和第二位置。
50.优选地,如图3所示,位置检测装置160包括上下间隔设置的第一光耦板161和第二光耦板162,第一光耦板161和第二光耦板162可检测信号的通断信息。如图4所示,送料仓141上设置有延伸部147,该延伸部147构造为筋状结构。当送料仓141上下运动至延伸部147穿过第一光耦板161时,位置检测装置160判断送料仓141到达第一位置,电机152接收到第一光耦板161传递的信号时停止驱动送料仓141运动。当送料仓141上下运动至延伸部147穿过第二光耦板162时,位置检测装置160判断送料仓141到达第二位置,电机152接收到第二光耦板162传递的信号时停止驱动送料仓141 运动。可以理解,在未示出的其他实施方式中,也可以选择其他合适的位置检测装置。
51.优选地,烹饪器具100还包括控制装置,控制装置可配置为计算经由储料仓131的出口134向送料仓141中落料的量。具体地,控制装置配置为至少基于送料的时长t、送料的速度v以及连通口的有效面积s确定流经连通口的落料量。如图2和图8所示,在本技术中,连通口定义为在送料仓141 位于第二位置时在进料口142与出口134的连通处形成的可供物料经过的面积最小的口。进一步,结合图8和图9所示,有效面积s=l1*b。如上所述,储料仓131的出口134的第一周向延伸长度l1小于送料仓141的进料口142 的第二周向延伸长度l2,因此,此处在计算有效面积s时取较小的第一周向延伸长度l1;而b为进料口142的上边缘与出口134的下端面之间的最短距离。
52.进一步优选地,落料量还与误差修正因子x相关。具体地,在根据本实用新型的优选实施方式中,落料量=s*vt+x。其中,t为送料仓141处于第二位置的时长,即,延伸部147穿过第二光耦板162开始至落米结束时延伸部147脱离第二光耦板162为止的时长。v=v0+gt,v0为落米初始速度,且v0为0~10m/s,g为重力加速度,通常取值9.8m/s2。
53.误差修正因子x定义为从送料仓141的延伸部147穿过第一光耦板161 开始至穿过第二光耦板162又立即返回至穿过第一光耦板161期间流经连通口的落料量。误差修正因子的存在是因为在送料仓141向下运动至延伸部147 穿过第二光耦板162之前,送料仓141的进料口142与储米仓的出口134处于半连通状态,物料已经从出口134流出;而当完成落料之后,送料仓141 向上运动,延伸部147脱离第二光耦板162之后,送料仓141的进料口142 与储米仓的出口134还处于半连通状态,仍有物料从出口134流出。上述两段仍有物料从出口134流出的时间并未计入送料时长t,但在这两段时间里也有物料通过出口134流入进料口142。因此,在计算落料量时通过将误差修正因子计算在其中,可以进一步准确地计算出落料量。对于误差修正因子的计算,可以在烹饪器具的实验阶段得出,例如可以通过将上述两
段时间的落料量通过称重的方式得出,并将其存储到烹饪器具的系统中。优选地,为了使误差修正因子x的值更准确,在实验阶段,可以通过对误差修正因子x 进行多次测试,并对多次测试的结果取平均值而得出。
54.结合图3所示,机体组件110中还设置有一罩体170,该罩体170形成储料仓131的一部分。特别地,储料仓131的第二端部133设置在罩体170 上。罩体170中设置有卡位174(如图1所示),上述的第一光耦板161和第二光耦板162可以固定在罩体170中的卡位174上。此外,电机152和螺杆 153也设置在罩体170中。
55.如图1-图3以及图10所示,储料机构130还包括缓冲件135,缓冲件 135设置在储料仓131的位于上方的第二端部133上,即,缓冲件135连接在罩体170上。缓冲件135可以由例如橡胶等可变形的软质材料制成。在装配状态下,送料仓141的外壁与该缓冲件135过盈配合。当送料仓141从第二位置向第一位置移动时,进料口142的边缘能够挤压缓冲件135至变形。
56.结合图11-图13所示,缓冲件135在俯视状态下大致构造为c形结构,且包括连接部136和连接在连接部136下方的变形部137。连接部136连接至罩体170,变形部137构造为从连接部136向下倾斜地延伸的结构边。优选地,变形部137相对于连接部136成预定角度地延伸,该预定角度大于0 且小于90度。示例性地,该预定角度可以为30度、40度或50度等,本领域的技术人员可以根据实际需要进行设置。在缓冲件135的装配状态下,该变形部137悬垂在第一端部132和第二端部133之间。
57.如图3以及图11-图13所示,连接部136包括第一卡合部138和设置在第一卡合部138下方的第二卡合部139。罩体170具有一底边缘171和设置在底边缘171下方且与底边缘171间隔开的凸缘172。第一卡合部138具有朝向底边缘171的向上的开口,并且能够通过该开口接合在底边缘171的底部,第二卡合部139具有朝向凸缘172的侧向的开口,并且能够通过该侧向的开口接合至该凸缘172,以此方式,可以将缓冲件135牢固地连接至罩体 170。在未示出的其他实施方式中,也可以通过例如注塑等方式将缓冲件135 与罩体170一体形成。
58.如图2和图11所示,连接部136和变形部137之间设置有缓冲腔173。该缓冲腔173可以在变形部137受力被挤压时缓冲变形。当送料仓141从第二位置向第一位置移动时,进料口142的下边缘能够将变形部137朝向缓冲腔173的方向挤压。上述方案可以使得,当送料仓141完成落料向上运动时,若正好有大米等颗粒物处于缓冲件135与进料口142的下边缘的接触位置,则颗粒物在接触到缓冲件135时,会在送料仓141的挤压下将缓冲件135的变形部137向缓冲腔173的方向挤压变形,直到颗粒物能完全避开送料仓141 的运动,从而可以使送料仓141正常运动至第一位置。该方案可以减小送料仓141的运动阻力,并且可以有效防止在送料仓141运行的过程中出现卡米而导致送料仓141无法正常工作。优选地,缓冲腔173的高度h大于或等于 3mm且小于或等于20mm,周向长度l3大于或等于2mm且小于或等于20mm,该方案可以更好地形成防卡米的效果。示例性的,缓冲腔173的高度h可以设置为5mm或6mm,周向长度l3可以设置为7mm或8mm,本领域的技术人员可以根据实际需要进行设置。
59.除非另有定义,本文中所使用的技术和科学术语与本实用新型的技术领域的技术人员通常理解的含义相同。本文中使用的术语只是为了描述具体的实施目的,不是旨在限制本实用新型。本文中出现的诸如“设置”等术语既可以表示一个部件直接附接至另一个部件,也可以表示一个部件通过中间件附接至另一个部件。本文中在一个实施方式中描述的
特征可以单独地或与其它特征结合地应用于另一个实施方式,除非该特征在该另一个实施方式中不适用或是另有说明。
60.本实用新型已经通过上述实施方式进行了说明,但应当理解的是,上述实施方式只是用于举例和说明的目的,而非意在将本实用新型限制于所描述的实施方式范围内。本领域技术人员可以理解的是,根据本实用新型的教导还可以做出更多种的变型和修改,这些变型和修改均落在本实用新型所要求保护的范围以内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1