用于家具的伸缩支腿的制作方法
1.本披露总体上涉及一种用于高度可调节家具的伸缩柱。
背景技术:
2.在高度可调节家具(例如,高度可调节桌子)中,桌面的高度可以升高或降低。这些桌子具有呈伸缩柱形状的支腿,每个支腿具有两个或更多个细长管,这些细长管以彼此相关的同心方式布置。桌面被布置在这些支腿的一端上。关于支腿,设计了一种用于改变桌面高度的布置,该布置驱动同心细长管沿纵向方向彼此远离或彼此相入。这种布置可以是位于内部并连接到管、同时被电动马达驱动的线性致动器。因此,同心细长管可以沿第一方向被驱动彼此远离以加长支腿,由此增加桌子的高度,或者沿相反方向被驱动,使得它们被驱动彼此相入,导致支腿缩短,由此减小桌子的高度。
3.这些伸缩柱通常是包括两个、三个或更多个管状伸缩部分的柱。在这些设计中,为了以稳定的方式加长支腿,当支腿处于其最大延伸度时,柱的邻近管必须具有重叠部分。
4.双管伸缩柱通常具有更简单的线性致动器的优点,该致动器驱动支腿的升高/降低。在wo 18056886 a1中披露了这些双管柱支腿的示例。
5.然而,这种双管设计具有较短的延伸高度覆盖范围,通常范围在支腿的最紧凑位置的650mm与最大延伸度下的1150mm之间。有限的高度范围主要是由于稳定性的原因,根源为伸缩支腿在其最大延伸度下的最佳长径比。
6.为了进一步增加伸缩支腿的延伸长度,利用了包括三个管的伸缩柱。除了双管柱的内伸缩部分和外伸缩部分之外,这些柱还包括中心伸缩段。在wo2018199827中给出了这种三管伸缩支腿的示例。此文献披露了一种用于高度可调节家具的伸缩柱,该伸缩柱包括线性致动器,该线性致动器包括固定到柱的第一端的第一心轴、至少部分地围绕第一心轴的管以及至少部分地布置在管内部且固定到柱的第二端的第二心轴。该伸缩柱进一步包括固定地布置到柱的第二端的内伸缩部分、连接到管的中心伸缩部分以及固定地布置到柱的第一端的外伸缩部分。该伸缩柱进一步包括将中心伸缩部分连接到管的装置,该装置被布置到管和中心伸缩部分,其方式使得中心伸缩部分可相对于管沿着纵向轴线移动。
7.三管柱可以覆盖更宽的高度范围,然而致动器的设计和操作变得更加复杂和昂贵,因为致动器还需要驱动柱的中心伸缩段。因此,需要一种高度可调节桌子,其具有大的调节范围,但与现有技术相比成本较低。
技术实现要素:
8.双管柱基本上更加便宜,因为驱动它们所需的复杂性较低,因此是更有成本效益的装置。发明人已经意识到,当仅使用两个管的解决方案时,管的很大长度不参与获得期望的最大高度,因为这保证了桌子支腿的稳定性。因此,为了使用双管柱达到更大范围的可达高度,需要在保持稳定性的同时消除管的重叠。
9.根据本发明的第一方面,此目的和其他目的是通过一种用于高度可调节家具的伸
缩柱来实现的,该伸缩柱沿着纵向轴线从伸缩柱的第一端延伸至第二端,该伸缩柱包括:固定地布置在该伸缩柱的该第二端处的长形外管;具有顶端和底端的长形内管,其中,该顶端限定该伸缩柱的该第一端,并且其中,该长形内管的大小被确定成并适于移入和移出所述外管、可被驱动单元沿着该纵向轴线在最大高度与最小高度之间驱动;以及中间元件,该中间元件具有下部部分、中间部分以及上部部分,该下部部分的大小被确定成并适于从其内部接合该外管,该中间部分的大小被确定成并适于装配到该内管中并从其内部接合该内管,该上部部分的大小被确定成并适于保持在该内管内,从而提供稳定性,其中,当所述伸缩柱在该最大高度与该最小高度之间移动时,该中间元件借助于该内管被动地移动。
10.应注意,术语“家具”在本发明的上下文中应当被广泛解读,以涵盖可以整合根据本发明的伸缩柱的任何器具或设备,比如但不限于可调节工作场所。
11.在一个实施例中,该内管和该外管可以是同心的。
12.该中间元件的被动移动意味着该中间元件的移动不受该驱动单元的主动控制。因此,与三管柱的解决方案不同(其中至少两个构件的移动需要单独地主动控制并且彼此相关,从而导致这些系统的复杂性),在由本发明提供的解决方案中,简单的驱动单元可以设置为单独控制一个移动构件。根据本发明,这个构件将是内管。这简化了在比之前由双管柱可达到的更大高度范围内驱动柱,因此大大降低了成本,同时仍然允许有稳定性。
13.在一个实施例中,该内管进一步包括接合部分,并且该中间元件进一步包括对应的接合元件,该接合元件适于与该内管的该接合部分相互作用,从而在扩展行程的过程中移动该中间元件。
14.扩展行程意味着该伸缩柱正在扩展,从而增加其长度。该伸缩柱的最大高度则将标记此行程的上限。
15.根据本发明,完全的扩展行程如下进行:从该柱的最小高度,该内管从该外管向外驱动,当该内管的该接合部分与该中间元件上的对应接合元件相接时,其将沿向外方向拉动该中间元件,直到达到该最大高度时停止。
16.在一个实施例中,该中间元件的该接合元件限定该中间元件的该上部部分的起始部分(onset)。
17.该接合元件可以被布置在该中间元件的中央部分中,从而通过将该中间元件的实质部分(即,上部部分)限制在该内管内来提供稳定性,并且此外,允许该中间部分延伸到该内管和该外管两者中。通过将该接合元件布置在中央部分中,在该中央部分上方的部分将被放置在该内管内,而在该中央部分下方的部分将被放置在该外管内,并且由此使该中间元件在完全延伸时提供的稳定性最大化。
18.在一个实施例中,该内管的该底端适于与该中间元件的该下部部分相互作用,从而在收缩行程的过程中移动该中间元件。
19.该中间元件的该上部部分、该中间部分和该下部部分可以是连续的部分,区别仅为它们的功能和它们的定位。该下部部分可以略微突出该内管的周边(下面将更详细地解释),而该中间部分和该上部部分具有基本相同的形状和尺寸,从而装配在内管内部。当该柱正在扩展时,仅借助于该接合元件与该内管的该接合部分的相互作用将该上部部分限制在该内管内。
20.收缩行程意味着该伸缩柱正在缩回,从而减小其长度。因此,该伸缩柱的最小高度
将标记此行程的下限。
21.根据本发明,完全的收缩行程如下进行:从该柱的最大高度,该内管被向内驱动向该外管,当该内管的该底端与该中间元件的该下部部分相接时,该内管将随着其继续在该外管内移动而推动该中间元件,直到达到最小高度时停止。如本文稍后所解释的,在桌子支腿内包括这种伸缩柱的桌子中,该最小高度可以在桌子支脚内的空腔的底部内达到。空腔底部将提供物理障碍以防止柱被更进一步地推动(特别是假如该驱动单元发生故障)。
22.在一个实施例中,当该伸缩柱处于该最小高度时,该中间元件的整个中间部分被布置在该内管内部。
23.这有益于实现较低的最小高度,因为整个长度的该中间元件(除了该下部部分之外)都将容纳在该内管内,因此对该伸缩柱的总高度没有贡献。该下部部分可以是显著很小的部分,比如是该中间元件的整个长度的10%、5%、1%或仅0.2%。
24.在一个实施例中,当延伸至该最大高度时,该内管基本上移出所述外管。
25.当处于该柱的最大高度时,该内管与该外管可以具有小于30%的重叠、20%的重叠、10%的重叠、5%的重叠、1%的重叠或完全没有重叠。然而值得注意的是,为了具有稳定性,在该内管与该外管之间具有一些重叠将是有益的。否则,取决于该外管和该中间元件的相对厚度,该柱可能会由于上述构件之间不可避免的间隙而晃动。
26.在一个实施例中,该中间元件的该下部部分包括至少一个突出部,该至少一个突出部被布置成当该中间元件的该中间部分处于所述内管内时从该内管的周边突出。
27.这可以防止该中间元件完全进入该内管,同时允许该内管在该收缩行程的过程中向下推动该中间元件。
28.在一个实施例中,该中间元件包括在该中间元件的该中间部分的外表面的一部分上的至少一个凹槽,该凹槽被定位在该接合元件与该下部部分之间并且被布置成容纳该内管的所述接合部分。
29.这可以允许该内管的该接合部分沿着所述纵向方向平滑移动。
30.根据本发明的另一个方面,提供了一种包括至少一个支腿的桌子,每个支腿包括根据本发明的第一方面的伸缩柱,其中,该伸缩柱从该内管的顶端固定地附接到该桌子,并且在该外管的底端处固定地附接到支脚元件。
31.可以只有一个支腿包括被该驱动单元主动驱动的由第一方面限定的伸缩柱,而其他(多个)支腿是被动支腿。
32.该内管的该顶端可以被附接到桌面的底侧。
33.该外管的底端可以被固定到该支脚元件上或在该支脚元件内。
34.在一个实施例中,所述外管的该底端被布置到该支脚元件的空腔中,从而允许该内管在该桌子处于该最小高度位置时进入该支脚元件。
35.该桌子支脚可以是空心部件,包括具有一定厚度的外部形状限定本体。在这种情况下,该伸缩柱的该外管的底端将在该支脚的空心本体内进行调节,并且被附接到外部本体的内侧。替代性地,该支脚可以不是空心的,而是包括被设计成容置该外管的底端的空腔。在任一种情况下,将该外管的底端容纳在该支脚元件内将通过使该最小高度进一步降低该桌子支脚的高度来增加可达高度范围。
36.在本发明的另一个方面中,提供了一种桌子。该桌子可以包括根据本发明的上述
实施例中的任一个的伸缩柱。然而,该桌子不必具有带有上述特征的伸缩柱,而可以是独立的桌子。然而,如果该桌子确实包括上面的伸缩柱,则协同作用是进一步减小了桌子的最小高度以及以简单且廉价的方式实现驱动。该桌子可以包括:马达,该马达基本上布置于该伸缩柱外部,用于为延伸到该伸缩柱中的蜗杆提供旋转运动并且驱动蜗轮;空心轴承套筒,该空心轴承套筒可从其内部驱动地布置到该蜗轮并且联接到导螺杆,使得该导螺杆在该轴承套筒被该马达驱动的情况下围绕该纵向轴线旋转;用于接合该导螺杆的带有螺纹的接收螺母,该接收螺母被联接到输出轴,从而在该导螺杆旋转时沿着该导螺杆的长度线性地移动,其中,该输出轴在所述马达启动时使该长形内管移入和移出所述长形外管,使得该输出轴沿着该纵向轴线的完全抽出将实现该伸缩柱的该最大高度,并且完全缩回将实现该伸缩柱的该最小高度。
37.根据这个实施例,作为本文前面提到的该驱动单元的一部分的该马达是提供旋转移动的驱动力,其最终通过该驱动单元的其他部件在该最小高度与该最大高度之间驱动该内管。
38.基本上布置在该伸缩柱外部的该马达可以显著贡献于获得更大的高度范围,因为其尺寸都不会增加该柱的最终长度,从而为该高度范围的最小值留出空间。在这个实施例中,该马达可以被附接到该桌面的背面,邻近于柱,使得该蜗杆可以到达该柱的相关部件(即,该蜗轮)。
39.该蜗轮可以是空心结构,被设计成容纳附接在其内侧的该轴承套筒。因此,当该蜗杆驱动该蜗轮时,该蜗轮和所附接的轴承套筒都将围绕该纵向轴线旋转。该套筒轴承具有空心结构。可以在其空心结构内容纳该导螺杆。该导螺杆可以从底端联接到该轴承套筒,并且被布置成随着该轴承套筒的旋转而旋转。该输出轴(实际上是联接到该内管并被布置成沿纵向方向移动该内管的构件)从一端通过该接收螺母联接到该导螺杆。随着该导螺杆的旋转,该螺母将沿着该导螺杆的凹槽移动,从而使该输出轴沿着该纵向轴线向上或向下移动。
40.在一个实施例中,该空心轴承套筒被布置成通过将该导螺杆的末端部分和进一步缩回时的该输出轴容纳在该轴承套筒的空心结构内来使该输出轴能够进一步缩回。
41.这个实施例可以允许更进一步地降低该柱的最小高度,从而获得更大的高度范围。
42.在一个实施例中,该轴承套筒和该蜗轮位于定位在该伸缩柱的该第一端处的壳体内部,该壳体被布置成进一步容纳该导螺杆的一部分和在输出轴缩回时的该输出轴。
43.将这些构件容纳在壳体内将这些部件固定在一起并就位,同时提供了更好的美观性。值得注意的是,此壳体可以允许该内管的顶端在该伸缩柱的收缩行程和扩展行程中相应地进出自身。此外,它可以允许在其内部容纳其他有用的部件。下文中给出了这种部件的示例。
44.在一个实施例中,该壳体进一步包括至少一个轴向轴承,从而减小该轴承套筒随着该蜗轮旋转的旋转摩擦。
45.该轴向轴承可以被布置和定位成部分地围绕该蜗轮。在这个实施例中,该轴向轴承必须允许该蜗杆从未被围绕的部分接近该蜗轮。该轴向轴承可以被布置成从外侧来装配在该内管内。此外,当该柱接近其最小高度时,该轴向轴承可以被布置成装配在该外管内。
46.在一个实施例中,该壳体进一步包括至少一个径向轴承,从而径向地固定所述轴承套筒并且减小所述轴承套筒相对于所述蜗轮旋转时的摩擦。
47.该径向轴承可以沿着该纵向轴线定位和固定在该蜗轮的任一侧,并且从内侧围绕附接到该径向轴承的该轴承套筒。从外部,该径向轴承可以被装配在该轴向轴承的内部。
48.具有两个径向轴承的实施例是优选的,每个径向轴承沿纵向方向定位在该蜗轮的任一侧。
49.在本发明的另一个方面中,提供了一种支脚延伸单元。根据上述实施例中的任一个(具有或不具有带有中间构件的伸缩柱),该延伸单元可以用于桌子的支脚。然而,该延伸单元不必布置在这种桌子中,而可以是独立的部件。但是,如果将该延伸单元与上述桌子相结合,则协同作用是进一步增加了这种桌子的行程长度(即,在最小高度与最大高度之间的长度),并且这是以廉价的方式实现的。无论如何,该支脚包括延伸单元,该延伸单元适于位于该支脚的内部容积内并且可在该支脚下方平行于该纵向轴线手动延伸,该延伸单元包括:芯柄,该芯柄被定位在该支脚的该内部容积内并且从一端固定到该支脚,该芯柄包括外表面上的螺纹;第一延伸承座,该第一延伸承座包括内表面的第一部分上的第一凹槽,这些第一凹槽被布置成与该芯柄的这些螺纹接合并且围绕平行于该纵向轴线的轴线旋转,从而相应地实现该第一延伸承座从该支脚的该空心容积的可旋转伸出和到该空心容积的可旋转缩入,该芯柄是空心的并且适于接收工具,该工具用于施加该芯柄相对于该第一延伸承座的旋转以调节该延伸单元的总长度延伸度。
50.这将通过使该桌子的最大高度增加该第一延伸承座的可延伸长度来为该桌子提供更宽的可达高度范围。
51.该芯柄优选地可以延伸该支脚的整个高度的至少90%,并且沿着其延伸度的至少90%具有凹槽。
52.该芯柄的工具接纳部分可以适于接收内六角扳手或其他等效工具,以便通过手动旋转内六角扳手工具来施加旋转。
53.在一个实施例中,该延伸单元的该第一延伸承座进一步包括该内表面的第二部分上的第二凹槽。
54.在一个实施例中,这些第一凹槽沿着该第一延伸承座的内表面的凹槽部分的30%、40%、50%、60%或70%延伸,而这些第二凹槽相对于彼此沿着凹槽部分的另外70%、60%、50%、40%或30%延伸。
55.在一个实施例中,该支脚的该延伸单元进一步包括:
56.第二延伸承座,该第二延伸承座包括外表面的一部分上的凹槽,这些凹槽被布置成与该第一延伸承座的这些第二凹槽接合并围绕该纵向轴线旋转,从而相应地实现第二延伸承座从第一延伸承座的可旋转伸出和到第一延伸承座的可旋转缩入。
57.这可以允许将该桌子的可达高度范围更进一步地增加该第二延伸承座的可延伸长度和该第一延伸承座的可延伸长度。
58.在一个实施例中,该第一延伸承座的这些第二凹槽包括与该第一延伸承座的这些第一凹槽不同的至少一个特性。
59.差异可以在于尺寸,比如:凹槽间距、凹槽直径、凹槽高度,或者在于其旋转摩擦,或替代性地上述特性的任何组合。
60.在一个实施例中,该第一延伸承座和该第二延伸承座相应地与该芯柄的这些螺纹和该第一延伸承座的这些第二凹槽具有不同的旋转摩擦,从而允许顺序地启动这些延伸承座。
61.由此,可以保证这些延伸承座可以按顺序而不是同时地向外延伸。
62.具有较低相对旋转摩擦的延伸承座将在手动旋转该工具时首先启动,随后,当该延伸承座被延伸至其最大延伸度时以及在此之后,另一个延伸承座可以通过手动旋转该工具被旋转启动。
63.值得注意的是,两个延伸承座不需要都延伸,它们也不需要延伸到其最大长度,但延伸量可以由用户调节以便获得令人期望的桌子高度。
附图说明
64.参照附图,本发明的进一步细节和方面将从以下详细说明中变得清楚,在附
65.图中:
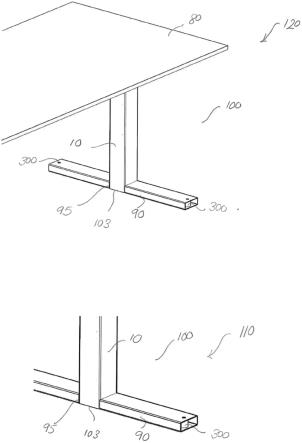
66.图1a至图1d示出了处于其最小位置的伸缩柱的透视图。
67.图2a至图2c示意性地展示了伸缩柱的扩展行程的第一阶段。
68.图3a至图3b演示了在扩展行程的过程中内管的接合部分与中间元件的接合元件接合。
69.图4a至图4b展示了扩展行程的第二阶段。
70.图5a至图5d展示了处于其最大位置的伸缩柱。
71.图6a至图6b示意性地演示了伸缩柱的收缩行程的第一阶段。
72.图7a至图7b描绘了收缩行程的第二阶段。
73.图8示出了中间元件的截面透视图。
74.图9a至图9d示出了伸缩柱的中间元件相对于输出轴和导螺杆的相对位置。
75.图10a至图10d显示了伸缩柱和驱动单元。
76.图11a至图11c示出了处于最小高度的伸缩柱和驱动单元。
77.图12a至图12b示出了具有单个延伸承座的延伸单元。
78.图13a至图13b是处于最大延伸度的带有单个延伸承座的延伸单元。
79.图14示出了完全缩回的带有双延伸承座的延伸单元。
80.图15a至图15b是处于最大延伸度的带有双延伸承座的延伸单元。
81.图16a至图16b是具有方形截面的延伸单元。
82.图17a至图17b是处于最大延伸度的具有方形截面的延伸单元。
具体实施方式
83.现在将在下文中参照附图对本发明进行更全面地描述,在附图中示出了本发明的当前优选实施例。然而,本发明可以被实施为许多不同的形式并且不应被解释为限于在此提出的这些实施例;而是,这些实施例被提供用于获得彻底性和完整性、并且向技术人员充分地传达本发明的范围。
84.图1至图7展示了伸缩柱的完全的扩展行程和收缩行程的不同阶段。为了方便观看,并且在更好的背景下进行说明,附图是参照高度可调节的桌子绘制的,其中,支腿包括
根据本发明的伸缩柱。然而应当注意的是,权利要求不限于带有所附桌子构件的伸缩柱。而是,所寻求的保护由权利要求限定。
85.图1a至图1d演示了处于其最小位置111的伸缩柱100。应注意,最小高度和最小位置都指的是同一个概念,因此除非另有说明,否则在本文的其余部分中可以互换使用。此外,上述观念也适用于最大高度和最大位置。此外,最小高度111和最大高度112是相对于笛卡尔坐标系限定的,其中,伸缩柱100的纵向轴线对应于且平行于所述坐标系的y轴。原点被限定为伸缩柱的最小位置111,而最大位置112则将在所述坐标系的x-y平面的第一象限中。
86.图1a描绘了处于最小高度111的高度可调节桌子120的一部分,其中,支腿包括根据本发明的伸缩柱100。伸缩柱从内管20的顶端22(未示出)附接到桌面80的下侧。
87.图1b和图1c示出了伸缩柱100的下部部分和桌子120的支脚元件90的特写视图。在图1a中,可以看到伸缩柱100的外管10定位在桌子120的支脚元件90的空腔95内。在支脚元件90的两侧都可以看到延伸单元300。这些延伸单元可以辅助用户得到桌子120的更宽的可达高度范围。延伸单元300在本文中并关于图12a至图15b更详细地描述。
88.外管10的底部限定伸缩柱100的第二端103。图1b展示了其中移除了外管10的一部分以露出内管20和中间元件30的视图。如可以看到的,在伸缩柱100的最小位置111处,内管20和因此中间元件30坐于伸缩柱的最底部位置处,在支脚元件90的空腔95内。中间元件30的下部部分31从内管20的底端23的周边突出。中间元件的下部部分31被布置并大小被确定成与外管10的内侧配合并接合。
89.图1d的110示出了在桌子120的支脚元件90的空腔95内调节的处于最小高度111的伸缩柱100,而不包括桌面80,从而提供内管20的顶端22(该顶端确定伸缩柱的第一端102)的视图。桌面80将定位在内管20的顶端22上方,并且附接到该顶端。可以看到马达150被布置在内管20的上部部分处,该上部部分坐于壳体60中。马达150是驱动单元200(未示出)的一部分,其用于在柱的最小高度111与最大高度112之间驱动内管20。驱动单元200稍后将在本文中进行详细描述。如从图中可以观察到的,内管20和外管10的顶端被容纳在壳体60内。
90.在图1d的视图中,外管10和内管20已被部分移除,以便露出中间元件30以及作为驱动单元200(未示出)的一部分的输出轴40的一部分。中间元件30包括下部部分31、中间部分32以及上部部分33,该下部部分的大小被确定成并适于从内部接合外管10,该中间部分的大小被确定成并适于装配到内管20中并从内部接合内管20,该上部部分的大小被确定成并适于保持在内管20内,从而提供稳定性。中间元件进一步具有接合元件35,该接合元件限定中间部分32的末端和上部部分33的始端,并且被布置成在扩展行程的第二阶段的过程中(即,当内管20与中间元件30接合时)与内管20的接合部分21接合,并且在伸缩柱100的扩展行程的过程中使中间元件30随其自身被动地移动。中间元件进一步包括沿着中间部分32的长度的凹槽34,该凹槽被设计成在扩展行程的第一阶段(即,当内管20从外管10向外移动但尚未与中间元件30接合时,因此中间元件30是静止的)以及伸缩柱100的收缩行程的第一阶段(即,当内管20向内移动向外管10但内管20的底端23尚未到达并接合中间元件的下部部分31时,因此中间元件30是静止的)的过程中适应内管的接合部分21沿自身的移动。
91.图2a至图2c示意性地展示了扩展行程的第一阶段。如上文提到的,这个阶段被限定为当内管20正在从外管10向外移动但其接合元件21尚未与中间元件30的接合部分35接合,使得中间元件30静止时。
92.图2a描绘了在扩展行程的第一阶段的过程中高度可调节桌子120的一部分,其中支腿包括根据本发明的伸缩柱100。伸缩柱从内管20的顶端22(未示出)附接到桌面80的下侧。在外管10的顶端可见凹部15,该凹部被设计用于当伸缩柱100处于其最小高度111时接纳驱动单元200的蜗杆156(未示出)。
93.图2b和图2c示出了伸缩柱100的下部部分和桌子120的支脚元件90的特写视图。在图2b的视图中,外管10被部分地移除以露出内管20和中间元件30。可以看到,当内管20已经相对于其在图1中的位置向上(从外管10向外)移动时,中间元件30是静止的,并且仍然坐于伸缩柱100的底端103处、在支脚元件90的空腔95内。图2c演示了其中内管20的侧壁被部分地移除以露出内管20的定位在中间元件30的凹槽34内的接合部分21的视图。接合部分21被设计成在扩展行程的第一阶段中在此凹槽34内移动,从而提供平滑运动。
94.图3a至图3b演示了伸缩柱100的扩展行程的时刻,其中内管的接合部分21与中间元件30的对应接合元件35接合。图3a示出了桌子120的下部部分的特写视图,其中可以部分地看到伸缩柱100和支脚元件90。在图3a的视图中,外管被部分地移除,从而露出内管20的底端23和中间元件30。在这个时刻,当中间元件的下部部分31仍然坐于伸缩柱100的底端103并因此静止时,中间元件32的全长处在内管20外部,因为内管20的接合部分21现在与中间元件30的接合元件35接合。从图3b中提供的视图可更好地观察到这一点,其中移除了内管20的侧壁以提供中间元件30的接合元件35与内管20的接合部分21的接合的透视图。在图3b中,还可部分地观察到中间元件30的上部部分33。无论伸缩柱100处于扩展行程或收缩行程的哪个阶段,这个上部部分33将始终处在内管20内。
95.图4展示了扩展行程的第二阶段。如上文提到的,这个阶段被限定为当内管20通过其接合部分21与中间元件30的接合元件35接合并且在伸缩柱100的扩展行程的过程中使中间元件30随其自身被动地移动时。图4a描绘了在扩展行程的第二阶段的过程中高度可调节桌子120的一部分,其中,支腿包括根据本发明的伸缩柱100。伸缩柱从内管20的顶端22(未示出)附接到桌面80的下侧。在外管10的顶端可见凹部15,该凹部被设计用于当伸缩柱100处于其最小高度111时接纳驱动单元200的蜗杆156(未示出)。图4b演示了与图4a中相同的视图,只是外管10的侧壁被移除,从而露出内管20的底端23以及中间元件30的下部部分31和中间部分32。如可见的,中间元件30已经通过内管20被动地向上移动(从外管10向外)。可以理解的是,在扩展行程的这个阶段的过程中,中间元件30不再是静止的。
96.图5展示了处于其最大位置112的伸缩柱100。图5a和图5b描绘了处于最大高度112的高度可调节桌子120的一部分,其中,支腿包括根据本发明的伸缩柱100。伸缩柱从内管20的顶端22(未示出)附接到桌面80的下侧。外管10的底端限定了伸缩柱100的第二端,可以看到它定位在支脚元件90的空腔95内。接纳外管10的凹部15的蜗杆156(未示出)也在图5a中可见。在图5b中,外管10的侧壁被移除,从而露出内管20的底端23和中间元件30。图5c示出了图5b的伸缩柱100的盒装部分的特写视图。如从图5b和图5c看到的,中间元件30的中间部分32的整个长度处在内管20外部。如可观察到的,在这个阶段,内管20和外管10的重叠p1相对于伸缩柱100的总长度l非常小。由于重叠的长度增加了伸缩柱在其最小高度的长度和/或减小了伸缩柱在其最大高度的长度,因此令人期望的是具有尽可能小的重叠p1,优选地小于长度的20%、长度的15%、长度的10%、长度的5%、或小至长度的2%或更小。
97.图5d示出了在桌子120的支脚元件90的空腔95内调节的处于最大高度112的伸缩
柱100,而不包括桌面80,从而提供确定伸缩柱的第一端102的内管20的顶端22的视图。桌面80将定位在内管20的顶端22上方,并且附接到该顶端。可以看到马达150被布置在内管20的上部部分处,该上部部分坐于壳体60中。在图5d的视图中,外管10的侧壁和内管20的一部分已被移除,从而给出整个中间元件30、输出轴40和导螺杆50的一部分的透视图。导螺杆50也是驱动单元200的部件,并且将在本文中进一步更详细地解释。如此图中所示,内管20的接合部分21与中间元件30的接合元件35接合,并且被定位在外管10内部的最顶部分处以及内管20内部的最底部分处。如先前提到的,中间元件30的上部部分33将始终处在内管20内以提供稳定性。而且,大小被确定成并适于从内部接合外管10的下部部分31与外管10的内壁摩擦接合。
98.图6示意性地演示了伸缩柱100的收缩行程的第一阶段。如上文提到的,这个阶段被限定为当内管20正在向内移动向外管10但内管20的底端23尚未到达也未接合中间元件30的下部部分31,使得中间元件30静止时。在收缩行程的第一阶段的过程中,中间元件30的下部部分31通过与外管10的内壁的摩擦接合而保持静止。
99.图6a描绘了在收缩行程的第一阶段的过程中高度可调节桌子120的一部分,其中,支腿包括根据本发明的伸缩柱100。伸缩柱从内管20的顶端22(未示出)附接到桌面80的下侧,并且限定伸缩柱100的第二端103的外管10的底端处于支脚元件90的空腔95内。图6b是图6a中标记的伸缩柱100的盒装部分的特写视图。在图6a和图6b两者中移除了外管的侧壁,从而露出内管20的底端23、中间元件30以及输出轴40的一部分。如从这些图中可见的,并且由于内管20向下移动(向内移入外管10中),内管20与外管10的重叠p2与如图5所示在伸缩柱100的最大高度112处的上述构件的重叠p1相比更大。由于内管20在中间元件30的中间部分32上的向下移动,与在伸缩柱100的最大位置112处相比,中间元件30的中间部分32保持在内管20外部的部分更小。在收缩行程的第一阶段的过程中,内管20的接合部分21将在中间元件30的凹槽34内移动。
100.图7描绘了伸缩柱100的移动的最后阶段,即,收缩行程的第二阶段。这个阶段被限定为当内管20正在向内移动向外管10并且通过其底端23与中间元件30的下部部分31接合,并且在伸缩柱100的收缩行程的过程中使中间元件30随其自身被动地移动时。
101.图7a描绘了在收缩行程的第二阶段的过程中高度可调节桌子120的一部分,其中,支腿包括根据本发明的伸缩柱100。伸缩柱从内管20的顶端22(未示出)附接到桌面80的下侧。在图7a的视图中移除了外管10的一部分,从而示出在这个阶段处在外管10内的内管20的部分,中间元件30的下部部分31位于内管20的底端23下方并且从该底端的周边和输出轴40的一部分突出。如可从这个图中观察到的,内管20的上部部分保持在外管的外部,因为伸缩柱100在收缩行程结束时尚未达到其最小高度111。
102.图7b示出了伸缩柱100的下部部分和桌子120的支脚元件90的特写视图。在图2b的视图中,外管10被部分地移除以露出内管20和中间元件30。
103.图8示意性地示出了中间元件30的截面透视图。如所观察到的,中间元件30的内部是空心的,包括两个区段;即,中间元件30的第一内部空心37和第二内部空心38。中间元件30的空心结构被设计成容纳输出轴40和/或导螺杆50。第一内部空心37所具有的截面直径d1大于第二内部空心38的截面直径d2。从第一内部空心37开始的第二内部空心38的起始部分由第二内部空心38的顶部边缘36限定。这个顶部边缘36用作中间元件30的端部止动件,
类似于物理障碍,从而阻挡中间元件在扩展行程中进一步向外移动。因此,顶部边缘36将被称为物理障碍。物理障碍36的停止机构关于图9解释如下。
104.图9演示了伸缩柱100,以及中间元件相对于输出轴40和导螺杆50的相对位置。图9a示出了其中移除了外管10的侧壁和内管20从而露出中间元件30、输出轴40和导螺杆50的视图。驱动单元的机制稍后将在本文中进行详细描述,但简而言之,导螺杆50将旋转移动转换为输出轴40的纵向移动。输出轴40进而联接到内管20,并且在伸缩柱100的扩展行程和收缩行程的过程中相应地驱动内管20从外管10向外和向内。
105.在图9a中,可以看到中间元件30的第一内部空心37的开口,导螺杆50正在穿过该开口。输出轴40从第二空心38的开口(未示出)从另一端离开中间元件30。图9b示出了与图9a相同的视图,只是中间元件30被部分地移除从而露出输出轴40和导螺杆50的处于中间元件30内的部分。接收螺母45处在输出轴40的顶部,并且将其联接到导螺杆50。图9c示出了图9b中的伸缩柱的一部分的特写视图,其中,中间元件的整个长度以及输出轴40和导螺杆50的部分是可见的。此外,在图9c中,外管10和内管20从图片中完全移除。集中于中间元件30的内侧,可见第一内部空心37、第二内部空心38和物理障碍36。当导螺杆50处于第一内部空心37内时,输出轴40良好地在第一内部空心37内,拖尾进入中间元件30的第二内部空心38中。这是由于柱处于其最小高度111与最大高度112之间的中间某处,如图9a和图9b中内管20相对于外管10的定位所指示的。此外,从图9c可以看到,输出轴40的接收螺母45包括下突出部46,该下突出部的截面直径略大于输出轴40的截面直径。这个突出部46的直径大于中间元件30的第二内部空心38的直径d2。因此,当处于扩展行程中时,突出部46将撞击在中间元件30的物理障碍36上,从而阻挡中间元件30在伸缩柱100中进一步向外移动。这种情况在图9d中进行描绘,其中给出了伸缩柱100的截面透视特写视图。值得注意的是,如在这个图中观察到的,导螺杆50的一部分51良好地在输出轴40内延伸。然而,必须注意的是,导螺杆的这一部分51可能永远不会离开输出轴40,因为图9d演示了伸缩柱100的最大高度112。因此,当说到“导螺杆没有延伸到中间元件30的第二空心38内部”时,这仅意在指的是导螺杆50的不包括部分51的部分。
106.在图10和11中,将扩展地解释驱动单元200的机制。应注意,在所有这些图中,如在图10a中更好地看到的,给出了桌子120和因此伸缩柱120和驱动单元200的倒置视图。
107.图10显示了当伸缩柱100位于其最小高度111与最大高度112之间的中间某处时的伸缩柱100和驱动单元200。这从外管10和内管20以及输出轴40的接收螺母45(下面给出更多解释)的相对定位中可以看出。如可在图10a中观察到的,桌子120是倒置的,显示了桌面80的下面。宽向紧固杆81和两个长向紧固杆82通过壳体60帮助将伸缩柱100和驱动单元200紧固到桌面80的下侧。在图10b中,已经移除了外管10和内管的一部分以及整个中间元件30,从而提供输出轴40和导螺杆50的更佳的视图。观察到,导螺杆50穿在轴承套筒70内,穿入壳体60中。输出轴40的接收螺母45良好地位于轴承套筒70外部,这指明伸缩柱100未处于其最小高度111。
108.图10c展示了伸缩柱100的顶部部分的特写视图,其中,移除了外管10、内管20和壳体60的一部分,从而给出除了导螺杆50和输出轴40之外处在壳体60内的驱动单元200的部件的更佳的视图。图10d演示了驱动单元200的视图,其中不包括壳体60、外管10和内管20。从图10c和图10d可以理解,蜗杆156从一端附接到马达150、壳体60、壳体60的内保持件61、
内管20,并且在伸缩柱的大约最小高度111的情况下从设计成接收蜗杆156的另一端的凹部(65、25(未示出)、15(未示出))附接到外管10。取决于期望柱100扩展还是收缩,蜗杆156被构造为在被马达150驱动的任一旋转方向上旋转。蜗轮156则将这种旋转移动传递到蜗轮66,该蜗轮被布置和附接在轴承套筒70周围。当蜗轮66围绕纵向轴线旋转时,它将使轴承套筒70与自身一起围绕纵向轴线旋转。从图10d可观察到,导螺杆50从端79附接到轴承套筒70。导螺杆50可沿着纵向轴线旋转,并且随着轴承套筒70的旋转,它将使导螺杆50与自身一起旋转。导螺杆50又通过接收螺母45与输出轴40联接。输出轴40通过固定装置43从另一端固定到伸缩柱的第二端103。应注意,这个固定装置43保持输出轴40刚性地附接到柱100的第二端103,不允许任何移动分离。当导螺杆50旋转时,接收螺母45的内螺纹(未示出)与导螺杆50上的凹槽相互作用。由此,导螺杆50的旋转移动转换为输出轴50沿着纵向轴线的纵向移动,从而允许对包括根据本发明的伸缩柱100的桌子120进行高度调节。
109.此外,图10c和图10d演示了两个径向轴承64,这些径向轴承被装配和附接到轴承套筒70并围绕蜗轮66的两侧。这些径向轴承64用于径向地固定轴承套筒70,并且在轴承套筒70相对于蜗轮66旋转时减小旋转摩擦。此外,在图10c中,还可看见内保持件61附接到壳体60的内侧并且装配到径向轴承64和蜗轮66周围。此外,轴向轴承62可附接地装配在壳体60与径向轴承64之间。轴向轴承旨在减小轴承套筒70随着蜗轮的旋转而产生的旋转摩擦。在这个实施例中,壳体60的内保持件61必须允许蜗杆156从未被围绕的部分接近蜗轮66。内保持件61被布置成从外侧装配在内管20内,并且另外当柱100接近其最小高度111时装配在外管10内。
110.如先前所提到的,在图10的图示中,伸缩柱100不处于其最小高度111。这可从输出轴40的接收螺母45在导螺杆50上的位置观察到。在此演示的实施例中,为了更进一步地增加伸缩柱100的可达高度范围,轴承套筒70被构造为具有空心结构,从而能够在其空心78内容纳接收螺母45以及输出轴40的一部分。这是为了有助于更进一步地降低伸缩柱100的高度,因此允许实现更低的最小高度。
111.上述情况在图11中示意性地演示,其中在伸缩柱100的最小高度111示出了伸缩柱100和驱动单元200。在图11a中,示出了伸缩柱100的第一端102,其中,部分地移除了壳体60、内管20、外管10和内保持件61,从而露出蜗杆156、蜗轮66、径向轴承64、轴承套筒70的一部分以及输出轴40。在这个位置中,接收螺母45和导螺杆50均不可见,因为它们完全进入轴承套筒70的空心78中。这在图11b给出的视图中更好地看到,其中除了上述之外,还部分地移除了轴承套筒70、蜗杆156、蜗轮66和径向轴承64,从而示出轴承套筒70的空心78。如可从这两个图中观察到的,外管10完全处在壳体60内,表明柱100处于最小高度111。图11c示出了驱动单元200的示意图,其中完全移除了壳体60、内保持件61以及内管20和外管10。从图11b和图11c观察到,接收螺母45坐于轴承套筒70的最低端,使得导螺杆50在其与轴承套筒70的附接端46处几乎不可见。由此,伸缩柱100的高度可以进一步减小轴承套筒70的轴向长度x。
112.图12至图17描绘了根据本发明的第二方面的布置在高度可调节桌子120的支脚元件90上的延伸单元300的不同状态和/或实施例。通过更进一步地增加桌子120的最大高度,延伸单元300允许获得桌子120的更宽高度范围。
113.图12示出了具有单个延伸承座320的延伸单元300,该延伸承座被布置在高度可调
节桌子120的支脚元件90上。应注意,当不需要进一步最大化桌子120的高度时,延伸单元300可以被布置成完全缩回在支脚元件90的本体92内。这种情况在图12a中演示,其中给出了支脚元件90的截面视图,露出了完全缩回在支脚元件90的本体92内的第一延伸承座320。图12b展示了与图12a相同的状态,其中截面切割穿过延伸单元300以便露出其内的元件。芯柄310是可见的,从一端311固定地附接到支脚元件90。芯柄310是空心的,从而使得能够在第一延伸承座320的工具接纳端323处接收工具,以提供来自工具接纳部分318的手动旋转。芯柄310在其外表面上具有螺纹315,并且被布置成在延伸单元300完全缩回时处于第一延伸承座320内。第一延伸承座320包括位于内侧的一组第一凹槽325,该组第一凹槽被构造为在第一延伸承座320旋转时与芯柄310上的螺纹315接合。当工具(未示出)旋转时,第一延伸承座320通过第一组凹槽325与芯柄310的螺纹315接合,并且因此,第一延伸承座将沿着平行于纵向轴线的轴线移动,从支脚元件90下面向外延伸。
114.图13示出了延伸单元300在其最大延伸度下的上述实施例。在图13a中,可见第一延伸承座320在支脚元件90下面延伸。应注意,第一延伸承座320的微小部分321即使在完全延伸时仍保持在支脚元件90的本体92内。这是为了确保稳定性。芯柄310的螺纹315明显地裸露。图13b展示了与图13a相同的状态,其中,包括一个延伸承座320的延伸单元300处于其最大延伸度,使得截面的切线穿过延伸单元300。第一延伸单元的非延伸部分321的内部视图显示第一延伸单元320的凹槽325仍然与该部分321中的芯柄的螺纹315接合。
115.图14是处于其完全缩回状态的延伸单元300的另一个实施例(即,双延伸承座)的示意图示。除了第一延伸承座320之外,这个实施例还包括第二延伸承座330。第一延伸承座320被构造为当延伸单元300处于完全缩回时将第二延伸承座330包围在其自身的一部分328内。在这种状态下,从其余部分329开始,第一延伸承座320邻近于芯柄310。再次,类似于之前的实施例,芯柄310是空心的,从而使得能够从工具接纳部分318接收工具以被接收在第二延伸承座330的工具接收端333处。第一延伸承座包括位于邻近芯柄310的部分329上的一组第一凹槽,该组第一凹槽被构造为在工具(未示出)旋转时与其接合,并且该第一延伸承座另外包括一组第二凹槽326,该组第二凹槽被构造为接合第二延伸承座330。第一延伸单元的第一凹槽325和第二凹槽326的尺寸可以不同。在图14和图15所演示的特定实施例中,它们的直径和螺距不同。第二延伸承座330包括外部凹槽335,这些外部凹槽被构造为通过第一延伸承座320的第二凹槽326接合第一延伸承座320。
116.第一延伸承座320和第二延伸承座330相应地与芯柄310的螺纹315和第一延伸承座320的第二凹槽326具有不同的旋转摩擦,从而允许顺序地启动这些延伸承座320、330。
117.由此,可以保证这些延伸承座320、330可以按顺序而不是同时地向外延伸。
118.具有较低相对旋转摩擦的延伸承座将首先在第二延伸承座330旋转时通过手动旋转接合到第二延伸工具330的工具接纳端333的工具(未示出)而被启动,随后,当该延伸承座延伸至其最大延伸度以及在此之后,另一个延伸承座可以通过手动旋转工具来被旋转启动。
119.图15a和图15b描绘了处于其完全抽出状态的延伸单元300的双延伸承座实施例。如可以看到的,第一延伸承座320的一部分321保持在支脚元件90的本体92内,而第二延伸承座330的一部分331保持在第一延伸承座320的内部内。这些重叠部分321、331保证了延伸单元300在完全延伸时的稳定性。
120.值得注意的是,两个延伸承座不需要都延伸,它们也不需要延伸到其最大长度,但延伸量可以由用户调节以便获得令人期望的桌子高度。
121.图16和图17相应地示出了延伸单元300的实施例的缩回状态和抽出状态,其中延伸承座340具有方形截面。在这个实施例中,仅包括第一延伸承座340。在图16a中,已经移除了延伸承座,从而露出芯柄210和螺纹315。在图16a的视图中,在支脚元件90中穿过延伸单元340的凹部349将在支脚元件90下面延伸。图16b演示了具有处于缩回状态的方形单延伸承座340的延伸单元300。
122.图17a演示了延伸单元300,其具有在支脚元件90下面延伸的处于完全抽出位置的方形单延伸承座340。芯柄310和其螺纹315在图17a给出的视图中可见。图17b演示了延伸单元300,其具有处于完全抽出状态的方形单延伸承座340,其中切线穿过延伸单元300的元件从而露出其内的内部元件。方形延伸承座340的内部凹槽345是可见的。在这个实施例中,与之前的实施例(其中延伸承座320、330具有圆形截面,使得它们能够围绕平行于纵向轴线的轴线旋转)不同,方形延伸承座340不能旋转。而是,与之前的实施例(其中芯柄310被固定附接并不旨在旋转)不同,在图16和图17的实施例中,芯柄310被制成围绕平行于纵向轴线的轴线旋转。应注意,只允许芯柄310旋转移动,并且在其他方面沿纵向方向和侧向方向是静止的。这个实施例的芯柄310通过工具接纳部分318将工具(未示出)接纳到其本体的空心中。当工具旋转时,芯柄310与工具一起旋转。通过这样,方形延伸承座340的内部凹槽345与芯柄的螺纹315接合,使得延伸承座340能够轴向移动。
123.应注意,延伸承座可以具有任何几何截面和/或延伸单元可以包括任何数量的延伸承座。
124.本领域技术人员认识到,本发明决不限于上述优选实施例。相反地,在所附权利要求的范围内,许多修改和变化是可能的。
125.另外,所披露实施例的变化是技术人员在实践所要求保护的发明时通过学习附图、披露内容、以及所附权利要求可以理解并实现的。在权利要求中,词语“包括”不排除其他的要素或步骤,并且不定冠词“一”或“一个”并不排除多个。在相互不同的从属权利要求中引用某些措施的这种单纯事实并不表明不能有利地使用这些措施的组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1