一种商场清洁扫地机器人及方法与流程
一种商场清洁扫地机器人及方法
1.本申请是申请日为2019年3月25日,申请号为cn201910227717.2的发明名称为一种用于商场清洁的佣人式扫地机器人的分案申请。
技术领域
2.本发明涉及商场清洁领域,特别的,是一种商场清洁扫地机器人及方法。
背景技术:
3.在商场的路面上通常具有较多的灰尘和垃圾,为了自动清除它们,人们发明出了轻巧便捷的扫地机器人,这类机器人具有自动行驶和自动清扫的功能;
4.这类扫地机器人通常是利用滚刷负责扫地的,机体底部的集尘盒负责把扫不掉的细灰吸到集尘盒里去,但是对于大型商场且人流量多的地方一些地面上的死角携带的垃圾也相对较多,当对死角细灰处理的同时容易夹带着一些食品包装袋一起吸到集尘盒中,基于包装袋的大小厚度均不一致,如果在集尘盒吸尘的时候将这些体积厚度较大的包装袋吸附进去便容易造成排尘管道堵塞。
技术实现要素:
5.针对上述问题,本发明提供一种商场清洁扫地机器人及方法。
6.为了实现上述目的,本发明是通过如下的技术方案来实现:一种商场清洁扫地机器人及方法,其结构包括感应头部、机身、扫地手臂,所述机身的顶端安设有感应头部,且两者间采用电性连接,在所述机身的两侧机械连接有扫地手臂,在远离扫地手臂安装口的另一端设有配合毛刷的对接口,所述机身包括有翘柄、清灰口、底盘、移动轮、蓄电池口、集尘口,所述底盘中设有蓄电池口与集尘口,在蓄电池口的两侧安装有移动轮,所述集尘口贯穿至机身的内部与集尘盒相贯通,其中集尘盒主要由第一集尘腔、抽气泵、第二集尘腔、排尘件组成,所述第一集尘腔与第二集尘腔焊接为一体化,在两者的连接位置出通过隔板衔接,且两者衔接位置相对的一端设有排尘件,所述抽气泵设于第一集尘腔的左侧,所述排尘件与清灰口相通,所述第二集尘腔的内部设置有剪切叶片、高速转轴、收料网盘,所述剪切叶片设有四个,所述收料网盘的首末相通。
7.作为本发明的进一步改进,所述排尘件与延伸在机身内部的翘柄插嵌固定。
8.作为本发明的进一步改进,所述收料网盘设有两个,各为扇形结构,在两个所述收料网盘之间设有配合于剪切叶片的转动间隙且互不接触。
9.作为本发明的进一步改进,所述剪切叶片与高速转轴相嵌接,并通过连接轴固定。
10.作为本发明的进一步改进,所述高速转轴设有发热体、转盘、旋转电机,所述发热体设于转盘上,所述转盘配合于旋转电机。
11.作为本发明的进一步改进,所述发热体与连接轴之间固定有接杆。
12.作为本发明的进一步改进,所述排尘件由卸料板、密封块、支撑杆组成,所述卸料板与支撑杆形成t字形结构,所述卸料板的两侧通过密封块构成封闭的卸料空间。
13.作为本发明的进一步改进,所述卸料板位于卸料空间上,并与第一集尘腔、第二集尘腔内壁底端处于同一水平线上。
14.作为本发明的进一步改进,所述感应头部内部设置感应器,可可侦测障碍物,如碰到墙壁或其他障碍物,会自行转弯,配合机身设定控制路径,在商场中反复行走。
15.作为本发明的进一步改进,所述支撑杆远离卸料板的一端与翘柄连接,只需要拨动翘柄便可以实现卸料板在卸料空间上的摆动。
16.与现有技术相比,本发明具有如下有益效果:
17.1、本发明第一集尘腔与第二集尘腔共同作用,其中集尘口设于第二集尘腔处,在杂物吸入时,首先需要通过第二集尘腔进行处理,在第二集尘腔中利用剪切叶片配合高速转轴在高速转动下形成的高效剪切力将集尘口吸入的包装袋进行剪碎,使之形成细小碎片而不会堵塞排尘通道的同时可降低包装袋在集尘盒中的占用面积。
18.2、由于剪切叶片高速转动下会产生大量的气流,本发明在第二集尘腔中设有的收料网盘与剪切叶片相配合,将剪切叶片作用后的碎小包装袋至于收料网盘中,并且只有达到剪碎标准的包装袋才能完全置于内,防止在剪切叶片作用时产生的气流吹散剪碎后的包装袋。
19.3、本发明利用高速转轴中设有的发热体与剪切叶片相配合,随着发热体温度的升高,从而提高第二集尘腔内的空间温度,以此干燥在第二集尘腔中的包装袋,减少过分潮湿的包装袋在剪碎中效率低的问题。
20.4、本发明通过排尘件作用在第一集尘腔与第二集尘腔最低处的水平面上,由于重力作用,收集的粉尘多堆积在最低处,通过拨动支撑杆所配合的翘柄,便可打开卸料板,将杂物通过卸料空间至清灰口排出,不需要在另外的拆卸下集尘盒清理内部杂物便可达到排灰排杂,防止集尘盒在拆卸中粉尘四溅。
21.5、本发明翘柄与机身的衔接处采用弯折结构设计,在不排灰的情况下可将翘柄与机身完全贴合在一起,避免意外触发排灰通道导致二次清理。
附图说明
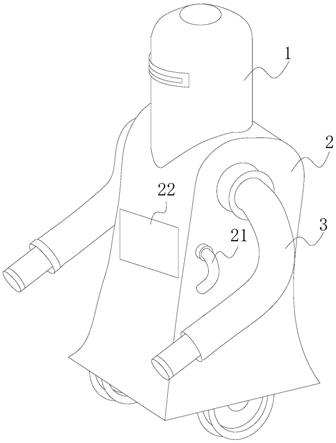
22.图1为本发明一种商场清洁扫地机器人及方法的外观结构示意图。
23.图2为本发明一种商场清洁扫地机器人及方法的底部俯视结构示意图。
24.图3为本发明集尘盒的内部结构示意图。
25.图4为本发明剪切叶片与高速转轴的平面安装结构示意图。
26.图5为本发明排尘件的结构示意图。
27.图中:感应头部
‑
1、机身
‑
2、扫地手臂
‑
3、翘柄
‑
21、清灰口
‑
22、底盘
‑
23、移动轮
‑
24、蓄电池口
‑
26、集尘口
‑
25、第一集尘腔
‑
251、抽气泵
‑
252、第二集尘腔
‑
253、排尘件
‑
254、剪切叶片
‑
53a、高速转轴
‑
53b、收料网盘
‑
53c、发热体
‑
3b1、转盘
‑
3b2、旋转电机
‑
3b3、连接轴
‑
b、卸料板
‑
54a、密封块
‑
54b、支撑杆
‑
54c。
具体实施方式
28.为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,图1~图5示意性的显示了本发明实施方式的扫地机器人的结构,下面结合具体实施方式,进一步阐
述本发明。
29.实施例
30.如图1
‑
图5所示,本发明提供一种商场清洁扫地机器人及方法,其结构包括感应头部1、机身2、扫地手臂3,所述机身2的顶端安设有感应头部1,且两者间采用电性连接,在所述机身2的两侧机械连接有扫地手臂3,在远离扫地手臂3安装口的另一端设有配合毛刷的对接口,所述机身2包括有翘柄21、清灰口22、底盘23、移动轮24、蓄电池口26、集尘口25,所述底盘23中设有蓄电池口26与集尘口25,在蓄电池口26的两侧安装有移动轮24,所述集尘口25贯穿至机身2的内部与集尘盒相贯通,其中集尘盒主要由第一集尘腔251、抽气泵252、第二集尘腔253、排尘件254组成,所述第一集尘腔251与第二集尘腔253焊接为一体化,在两者的连接位置出通过隔板a衔接,且两者衔接位置相对的一端设有排尘件254,所述抽气泵252设于第一集尘腔251的左侧,所述排尘件254与清灰口22相通,所述第二集尘腔253的内部设置有剪切叶片53a、高速转轴53b、收料网盘53c,所述剪切叶片53a设有四个,所述收料网盘53c的首末相通。
31.所述排尘件254与延伸在机身2内部的翘柄21插嵌固定。
32.所述收料网盘53c设有两个,各为扇形结构,在两个所述收料网盘53c之间设有配合于剪切叶片53a的转动间隙且互不接触。
33.所述剪切叶片53a与高速转轴53b相嵌接,并通过连接轴b固定。
34.所述高速转轴53b设有发热体3b1、转盘3b2、旋转电机3b3,所述发热体3b1设于转盘3b2上,所述转盘3b2配合于旋转电机3b3。
35.所述发热体3b1与连接轴b之间固定有接杆。
36.所述排尘件254由卸料板54a、密封块54b、支撑杆54c组成,所述卸料板54a与支撑杆54c形成t字形结构,所述卸料板54a的两侧通过密封块54b构成封闭的卸料空间。
37.所述卸料板54a位于卸料空间上,并与第一集尘腔251、第二集尘腔253内壁底端处于同一水平线上。
38.所述感应头部1内部设置感应器,可可侦测障碍物,如碰到墙壁或其他障碍物,会自行转弯,配合机身2设定控制路径,在商场中反复行走。
39.所述支撑杆54c远离卸料板54a的一端与翘柄21连接,只需要拨动翘柄21便可以实现卸料板54a在卸料空间上的摆动。
40.下面对上述技术方案中的扫地机器人的工作原理作如下说明:
41.扫地机器人不同于拖地机器人,因为在清扫灰尘时只能将大颗粒的灰尘清理,本发明采用的佣人式结构设计,在扫地手臂3的一端装有清扫毛刷达到扫地功能,并且还可在一定基础上减少过多的扫地死角存在;
42.为保证地面的洁净度,现有的扫地机器人还设有吸尘功能,主要将一些细小的灰尘吸附进集尘盒中,从而达到扫地机器人使用洁净度,本发明集尘盒主要由第一集尘腔251与第二集尘腔253配合抽气泵252,在第一集尘腔251与第二集尘腔253内抽空气使之形成一个负压空间从而将外界细尘通过集尘口25吸入,进而完成细尘的吸附作业,而在吸尘中会携带着一些包装袋一起被吸进去,为避免排灰通道出现堵塞的问题,本发明在第二集尘腔253中设有剪切叶片53a与高速转轴53b共同配合,由于集尘口25设在第二集尘腔253中,因此,细尘与一些杂物首先经过第二集尘腔253再到第一集尘腔251中,在第二集尘腔253中设
有的收料网盘53c与剪切叶片53a、高速转轴53b将第二集尘腔253的空间变小,只允许一些细尘或小杂物通过,因此,在吸附完成后关闭集尘口25时,启动旋转电机3b3,高速转轴53b带动剪切叶片53a高速转动将置于第二集尘腔253的杂物进行剪碎,从而满足排入到收料网盘53c的大小要求,因此集尘盒中的细尘与杂物达到一定容积后,拨动翘柄21,利用翘柄21所连接的支撑杆54c将卸料板54a由水平变为垂直,从而打开第一集尘腔251与第二集尘腔253的卸料空间,将杂物以及细尘成功的通过清灰口22排出,避免清理集尘盒时大量的粉尘四溅间接污染环境与内部零件。
43.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
44.因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1