一种料理机抗负载扰动方法及料理机与流程
1.本发明涉及一种料理机抗负载扰动方法及实用该方法的料理机。
背景技术:
2.料理机是一种能够实现搅拌、破壁、粉碎、绞肉、刨冰的食物处理机器。料理机工作时,刚开始往往并不知道料理的食物类型,而固体粉碎及液体搅拌场景下,采用相同的控制方式会导致不同场景下控制效果不佳,转速不稳定。对于固体粉碎来说,在电机高转速下,例如打冰糖操作,冰糖刚开始为固体,负载较大,后面变粉末,负载迅速变小;对于液体搅拌而言,高速打水过程中,水的形态没有发生改变,高速水流会形成漩涡,成为扰动的负载;对于固体液体混合食物,例如高速打豆浆,刚开始负载稍大,随着豆浆被破壁打匀,负载趋于纯液体形式;因此,料理机在高速转动过程中,存在负载扰动问题,负载扰动会导致转速震荡加剧,机体晃动严重,噪声较大。
技术实现要素:
3.本发明所要解决的第一个技术问题是针对上述现有技术提供一种料理机抗负载扰动方法,该方法能识别料理机在高速运行时搅动的负载是液体还是固体,从而动态调整电机转矩,继而降低在搅动液体时形成的漩涡所造成的转速扰动。
4.本发明所要解决的第二个技术问题针对上述现有技术提供一种料理机,该料理机能识别料理机在高速运行时搅动的负载是液体还是固体,从而动态调整电机转矩,继而降低在搅动液体时形成的漩涡所造成的转速扰动。
5.本发明解决上述第一个技术问题所采用的技术方案为:一种料理机抗负载扰动方法,其特征在于:包括如下步骤
6.步骤1、设置用于保存过零点的时间的数组t[n],并将数组t[n]清空,设置数组t[n]的有效元素个数c
t
、局部最大值n
max
、局部最小值n
min
,同时令c
t
=0,n
max
=0,n
min
=0,跳入步骤2;
[0007]
步骤2、获取料理机当前电机转速n,以及当前的时刻t
now
,跳入步骤3;
[0008]
步骤3、计算变量n
t
,n
t
=n-n
set
,然后跳入步骤4,其中n
set
为预设的电机设定速度;
[0009]
步骤4、判断变量n
t
是否等于0,若是,跳入步骤5,否则跳入步骤16;
[0010]
步骤5、数组t[n]的有效元素个数c
t
加1,跳入步骤6;
[0011]
步骤6、判断c
t
是否等于1,若是,跳入步骤7,否则跳入步骤8;
[0012]
步骤7、令t[0]=t
now
,跳入步骤20;
[0013]
步骤8、判断局部最大值n
maxtl
<n
max
<n
maxth
或者n
max
=0是否成立,若成立,跳入步骤9,否则跳入步骤14;其中n
maxtl
∈[100,200],n
maxth
∈[500,600];
[0014]
步骤9、判断局部最小值n
mintl
<n
min
<n
minth
或者n
min
=0是否成立,若成立,跳入步骤10,否则跳入步骤14;其中n
mintl
∈[-600,-500],n
maxth
∈[-200,-100];
[0015]
步骤10、令t[c
t
]=t
now
,计算过零点间隔时间t
int
=t[c
t
]-t[c
t-1],跳入步骤11;
[0016]
步骤11、判断过零点间隔时间t
mintl
<t
int
<t
minth
是否成立,若是,跳入步骤12,否则跳入步骤14;其中t
mintl
∈[2ms,3ms],t
minth
∈[100ms,200ms];
[0017]
步骤12、判断c
t
>c
th
是否成立,c
th
为预设常数,若是,跳入步骤13,否则跳入步骤20;
[0018]
步骤13、令电机转矩调节模式m=1,令调节标志位flgad=1,跳入步骤20;
[0019]
步骤14、令电机转矩调节模式m=0,令调节标志位flgad=0,跳入步骤15;
[0020]
步骤15、将数组t[n]清空,令c
t
=0,n
max
=0,n
min
=0,跳入步骤20;
[0021]
步骤16、判断变量n
t
>n
max
是否成立,若成立,跳入步骤17,否则跳入步骤18;
[0022]
步骤17、令n
max
=n
t
,跳入步骤18;
[0023]
步骤18、判断变量n
t
<n
min
是否成立,若成立,跳入步骤19,否则跳入步骤20;
[0024]
步骤19、令n
min
=n
t
,跳入步骤20;
[0025]
步骤20、判断电机转矩调节模式m是否等于0,若是,跳入步骤21,否则跳入步骤22;
[0026]
步骤21、采用pi算法调节电机的输出转矩,调节方式如下:
[0027]
设t(t)为时刻t电机转矩的输出,在经过δt时间后,输出的电机转矩为t(t+δt):
[0028][0029]
之后跳入步骤2;
[0030]
上述公式中,δt为转速的采样时间,即每隔δt时间更新一次速度;k
p
为预设比例系数,e(t+-δt)为时刻t+δt的电机转速的误差量,为常规参数;e(t)为时刻t电机转速的误差量,为常规参数;ki为搅拌固体时的积分系数,为预设常规参数;e(τ+δt)为τ+δt时刻电机转速的误差量,针对积分表达式积分变量为τ;
[0031]
步骤22、判断调节标志位flgad是否等于1,若是,跳入步骤23,否则跳入步骤2;
[0032]
步骤23、令flgad=0,说明此时处于负载扰动情况,料理机在搅动液体,输出的电机转矩为t(t+t
l
):
[0033][0034]
之后跳入步骤24;
[0035]
上述公式中,t(t)为时刻t电机转矩的输出,t(t+t
l
)为时刻t+t
l
电机转矩的输出;k
il
为搅拌液体时的积分系数,k
il
=λki,ki为搅拌固体时的积分系数,为预设常规参数;
[0036]
步骤24、将数组t[n]清空,令c
t
=0,n
max
=0,n
mmin
=0,跳入步骤2。
[0037]
作为优选,所述c
th
=300;n
maxtl
=150,n
maxth
=550,n
mintl
=-550,n
minth
=-150,t
mintl
=2.5ms,t
minth
=150ms,λ=1/5。
[0038]
本发明解决上述第二个技术问题所采用的技术方案为:一种料理机,包括电机,用于控制电机输出转矩的控制器,其特征在于:所述控制器采用上述抗负载扰动方法调节电机的输出转矩。
[0039]
与现有技术相比,本发明的优点在于:能识别料理机在高速运行时,搅动的是液体还是固体,并根据搅动的食物类型动态的调整电机转矩输出,降低在搅动液体时形成的漩
涡所造成的转速扰动,减小料理机工作时的晃动,降低噪声。
附图说明
[0040]
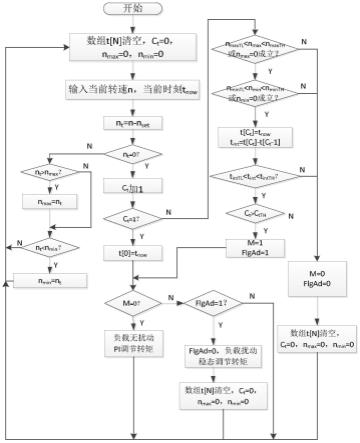
图1为本发明实施例中料理机抗负载扰动方法流程图。
具体实施方式
[0041]
以下结合附图实施例对本发明作进一步详细描述。
[0042]
本实施例提供了一种料理机抗负载扰动方法,参见图1所示,其包括如下步骤
[0043]
步骤1、设置用于保存过零点的时间的数组t[n],并将数组t[n]清空,设置数组t[n]的有效元素个数c
t
、局部最大值n
max
、局部最小值n
min
,同时令c
t
=0,n
max
=0,n
min
=0,跳入步骤2;
[0044]
步骤2、获取料理机当前电机转速n,以及当前的时刻t
now
,跳入步骤3;
[0045]
步骤3、计算变量n
t
,n
t
=n-n
set
,然后跳入步骤4,其中n
set
为预设的电机设定速度;
[0046]
步骤4、判断变量n
t
是否等于0,若是,跳入步骤5,否则跳入步骤16;
[0047]
步骤5、数组t[n]的有效元素个数c
t
加1,跳入步骤6;
[0048]
步骤6、判断c
t
是否等于1,若是,跳入步骤7,否则跳入步骤8;
[0049]
步骤7、令t[0]=t
now
,跳入步骤20;
[0050]
步骤8、判断局部最大值n
maxtl
<n
max
<n
maxth
或者n
max
=0是否成立,若成立,跳入步骤9,否则跳入步骤14;其中n
maxtl
∈[100,200],n
maxth
∈[500,600];n
maxtl
优选取值为150;n
maxth
的优选取值为550;
[0051]
步骤9、判断局部最小值n
mintl
<n
min
<n
minth
或者n
min
=0是否成立,若成立,跳入步骤10,否则跳入步骤14;其中n
mintl
∈[-600,-500],n
maxth
∈[-200,-100];n
mintl
的优选取值为-550,n
minth
的优选取值为-150;
[0052]
步骤10、令t[c
t
]=t
now
,计算过零点间隔时间t
int
=t[c
t
]-t[c
t-1],跳入步骤11:
[0053]
步骤11、判断过零点间隔时间t
mintl
<t
int
<t
minth
是否成立,若是,跳入步骤12,否则跳入步骤14;其中t
mintl
∈[2ms,3ms],t
minth
∈[100ms,200ms];t
mintl
的优选取值为2.5ms,t
minth
的优选取值为150ms;
[0054]
步骤12、判断c
t
>c
th
是否成立,c
th
为预设常数,表示数组t[n]的大小,c
th
可以取值为300;若是,跳入步骤13,否则跳入步骤20;
[0055]
步骤13、令电机转矩调节模式m=1,令调节标志位flgad=1,跳入步骤20;
[0056]
步骤14、令电机转矩调节模式m=0,令调节标志位flgad=0,跳入步骤15;
[0057]
步骤15、将数组t[n]清空,令c
t
=0,n
max
=0,n
min
=0,跳入步骤20;
[0058]
步骤16、判断变量n
t
>n
max
是否成立,若成立,跳入步骤17,否则跳入步骤18;
[0059]
步骤17、令n
max
=n
t
,跳入步骤18;
[0060]
步骤18、判断变量n
t
<n
min
是否成立,若成立,跳入步骤19,否则跳入步骤20;
[0061]
步骤19、令n
min
=n
t
,跳入步骤20;
[0062]
步骤20、判断电机转矩调节模式m是否等于0,若是,跳入步骤21,否则跳入步骤22;
[0063]
步骤21、采用pi算法调节电机的输出转矩,调节方式如下:
[0064]
设t(t)为时刻t电机转矩的输出,在经过δt时间后,输出的电机转矩为t(t+δt):
[0065][0066]
之后跳入步骤2;
[0067]
上述公式中,δt为转速的采样时间,即每隔δt时间更新一次速度;k
p
为预设比例系数,e(t+δt)为时刻t+δt的电机转速的误差量,为常规参数;e(t)为时刻t电机转速的误差量,为常规参数;ki为搅拌固体时的积分系数,为预设常规参数;e(τ+δt)为τ+δt时刻电机转速的误差量,针对积分表达式积分变量为τ;
[0068]
步骤22、判断调节标志位flgad是否等于1,若是,跳入步骤23,否则跳入步骤2;
[0069]
步骤23、令flgad=0,说明此时处于负载扰动情况,料理机在搅动液体,输出的电机转矩为t(t+t
l
):
[0070][0071]
之后跳入步骤24;
[0072]
上述公式中,t(t)为时刻t电机转矩的输出,t(t+t
l
)为时刻t+t
l
电机转矩的输出;k
il
为搅拌液体时的积分系数,k
il
=λki,λ优选取值为1/5,ki为搅拌固体时的积分系数,为预设常规参数;
[0073]
步骤24、将数组t[n]清空,令c
t
=0,n
max
=0,n
min
=0,跳入步骤2。
[0074]
通过上述方法,可以使料理机在高速运行时,判断搅动负载的是液体还是固体,然后动态调整转矩输出的方式,降低在搅动液体时形成的漩涡所造成的转速扰动,提高声音品质。
[0075]
本实施例还提供了一种料理机,包括电机,用于控制电机输出转矩的控制器,控制器采用上述公开的抗负载扰动方法调节电机的输出转矩。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1