抽吸清洁设备的制作方法
1.本发明涉及一种抽吸清洁设备、尤其自主行进的吸尘机器人,其具有设备壳体,在所述设备壳体中布置有风扇和过滤腔,所述过滤腔用于容纳借助所述风扇抽吸的抽吸物,其中,所述过滤腔具有用于可逆地封闭过滤腔的腔室开口的腔室封闭元件,并且其中,所述设备壳体具有相对于所述腔室封闭元件独立的、用于可逆地封闭设备壳体的壳体开口的壳体封闭元件,从抽吸清洁设备外部穿过所述壳体开口能够到达所述过滤腔的腔室开口。
背景技术:
2.这种抽吸清洁设备在现有技术中是已知的。它们通常具有具备所谓的永久过滤器的过滤腔,永久过滤器永久地留在抽吸清洁设备中并且可以借助基站或其他抽吸清洁设备再生。在此,过滤腔被抽空并且可用于抽吸清洁设备重新抽吸运行。
3.为了借助基站或甚至其他抽吸清洁设备的风扇抽空抽吸清洁设备的过滤腔,首先打开抽吸清洁设备的设备壳体,以实现相对于被设备壳体包围的过滤腔的入口。随后,过滤腔的腔室开口被打开,以便能够抽空过滤腔。
4.这种抽吸清洁设备的缺点是,用户或基站必须首先移动壳体封闭元件,并且然后也必须接着移动腔室封闭元件,因为壳体封闭元件不同时形成过滤腔的腔室封闭元件。然后过滤腔才打开用于再生过程。
技术实现要素:
5.从上述现有技术出发,本发明所要解决的技术问题是,使得用于抽空过滤腔的再生过程更容易,尤其能更容易地到达过滤腔的内部空间。
6.为了解决上述技术问题,按照本发明建议,所述腔室封闭元件和壳体封闭元件机械地相互耦连,使得所述壳体封闭元件相对于所述壳体开口的位移运动同时也引起所述腔室封闭元件相对于所述腔室开口的位移运动,其中,所述腔室封闭元件相对于壳体封闭元件可移动地支承在所述壳体封闭元件上。
7.根据本发明,壳体封闭元件和腔室封闭元件机械地相互耦连,使得在壳体闭合元件位移运动时,腔室闭合元件发生移位,从而使腔室开口可以与基站或其他抽吸清洁设备的抽吸接头连接,其中,位移运动可由用户手动进行或由抽吸清洁设备的伺服机构自动进行。因此仅通过唯一一个操纵动作就能进入过滤腔,即壳体封闭元件的移位,壳体封闭元件构成抽吸清洁设备的设备壳体的外部的局部区域。
8.优选的是,参照所述抽吸清洁设备在抽吸运行期间的通常的取向,所述壳体开口构造在所述设备壳体的上侧。在此,参照所述壳体开口的关闭状态,所述壳体封闭元件优选与所述设备壳体的相邻的壳体局部区域构成一个平面。在设备壳体的上侧上形成的壳体开口实现由用户或甚至由基站对壳体开口最佳的可到达性,以便将抽吸接头连接待再生的抽吸清洁设备的过滤腔。在抽吸清洁设备的壳体开口的关闭状态下,设备壳体的表面优选构成平坦的面,在该平坦的面中壳体封闭元件与相邻的壳体局部区域齐平地并排布置,使得
设备壳体的上侧易于清洁并为灰尘和脏物的积聚提供很少的可能性。
9.在此建议,所述壳体封闭元件可线性移动地支承在所述设备壳体上。因此壳体开口的打开通过壳体封闭元件相对于设备壳体的移位实现,其中,通过壳体封闭元件的位移运动也同时导致腔室封闭元件的位移。在壳体封闭元件位移时,优选首先腔室封闭元件从腔室开口或密封腔室开口的密封件抬起,然后腔室封闭元件才相对于腔室开口滑移。
10.尤其建议,所述腔室封闭元件通过随动件与所述壳体封闭元件机械地作用连接,从而在所述壳体封闭元件移位时也使得所述腔室封闭元件同时移位。所建议的随动件将壳体封闭元件和腔室封闭元件如此相互耦连,使得在壳体封闭元件移位时腔室封闭元件也一同移位。用户或基站只需使壳体封闭元件移位,然后由此腔室封闭元件的移位也自动进行。随动件可以优选稳固地在壳体封闭元件上固定,例如借助螺钉连接或卡锁连接,使得壳体封闭元件和随动件之间不能相对运动。相反,腔室封闭元件优选可移动地与随动件连接,以便相对于腔室封闭元件相对过滤腔的滑移附加地,还能实现腔室封闭元件相对于壳体封闭元件的运动。腔室封闭元件由此可以沿与滑移方向不同的方向从腔室开口或配属的密封件上抬离。
11.在此建议,所述抽吸清洁设备具有导引装置,用于机械地导引所述壳体封闭元件和/或随动件的位移运动。导引装置可以是形成或布置在设备壳体中的导引滑槽。导引装置例如可以具有导引凹槽,随动件或壳体封闭元件的对应的局部区域可以在导引凹槽内部滑动。优选的是,随动件的局部区域在导引滑槽中被导引,其中,壳体封闭元件又间接通过随动件支承在导引装置上。然而备选地也可以将壳体封闭元件的局域区域在导引装置中导引。
12.所述随动件附加地优选具有导引轨道,所述腔室封闭元件的连接元件在所述导引轨道中可移动地导引。在随动件内部的导引轨道实现腔室封闭元件从过滤腔抬离,其中,抬离运动的方向与由导引装置引起的位移运动不同。因此,除了将壳体封闭元件的位移运动传递到腔室封闭元件上之外,随动件的任务还在于将力传递到腔室封闭元件,所述力使腔室封闭元件遵循导引轨道与腔室开口分离或从腔室开口抬离。在此,导引装置的导引凹槽和随动件的导引轨道这样相互定向,使得在力沿打开方向施加到壳体封闭元件上时,首先导致腔室封闭元件沿随动件的导引轨道移位,然后才是沿导引装置的移位。然而,这两种运动也可以至少部分地同时进行。
13.优选的是,所述腔室封闭元件借助弹簧元件相对于所述壳体封闭元件支撑,其中,所述弹簧元件的复位力指向远离壳体封闭元件的方向。因此,不仅在空间方面,而且也在作用方式上,弹簧元件都布置在壳体封闭元件和腔室封闭元件之间,所述弹簧元件优选构造成压力弹簧。例如弹簧元件可以是螺旋弹簧、板簧或类似物。弹簧元件将腔室封闭元件压在过滤腔的局部区域或包围腔室开口的密封元件上,使得腔室开口优选灰尘密封和气密地被封闭。弹簧元件在此支撑在壳体封闭元件上。
14.此外建议,所述导引装置配有复位元件,所述复位元件设置为,将复位力沿关闭方向施加到所述壳体封闭元件和/或随动件的借助所述导引装置导引的局部区域上。复位元件例如可以是牵引弹簧,其在壳体封闭元件的打开运动中被张紧,然后一旦沿打开方向作用在壳体封闭元件上的力消失,就将壳体封闭元件或者在导引装置中导引的随动件拉回初始位置,该初始位置相当于壳体开口和腔室开口的关闭状态。可以规定,所述导引装置具有
多于一个的复位元件。若所述导引装置例如构造成沿周向包围壳体封闭元件的导引框架,或者具有两个子元件并且这些子元件从两侧限定腔室开口和壳体开口的边界,则可以与导引框架的局部区域相对置地或者给每个导引子元件都配设自己的复位元件。
15.尤其建议,所述壳体封闭元件在朝向设备壳体内部的下侧上具有导引斜坡,当所述壳体封闭元件沿打开方向位移运动时,所述导引斜坡能够在所述设备壳体的相邻的壳体局部区域之上滑动。导引斜坡的斜率优选与所述导引装置的斜率相对应,其中,所述斜率的尺寸优选这样确定,即壳体封闭元件相对于设备壳体的相邻的局部区域以尽可能小的角度位移。优选规定0.1度至5度的斜率。然而也可以规定高达10度的斜率。在位移到打开位置时,壳体封闭元件保持尽可能近地在设备壳体的上侧处,使得其不与基站的局部区域、进行再生的吸尘器甚至用户碰撞。然而备选或附加地也可以规定,壳体封闭元件进入设备壳体的凹部或盖子中。
16.最后建议,所述壳体封闭元件具有操纵区域,所述操纵区域与所述设备壳体的相邻的壳体局部区域相间隔,从而能够沿壳体封闭元件的打开方向对所述操纵区域施加移动力。若壳体封闭元件的操纵区域位于设备壳体的平面内,就可以在壳体封闭元件旁例如设置凹部,尤其凹槽,其可以到达操纵区域。重要的是,操纵区域如此布置,使得力可以作用在操纵区域上,所述力沿壳体封闭元件的移位方向作用,即沿壳体开口的打开方向作用。
附图说明
17.以下根据实施例进一步阐述本发明。在附图中:
18.图1示出在壳体封闭元件移位时按照本发明的抽吸清洁设备;
19.图2示出抽吸清洁设备,通过外部抽吸装置使得壳体封闭元件的移位继续进行;
20.图3示出外部抽吸装置与抽吸清洁设备的过滤腔连接时的抽吸清洁设备;
21.图4示出剖切按照图1的抽吸清洁设备的纵剖面;
22.图5示出剖切按照图2的抽吸清洁设备的纵剖面;
23.图6示出剖切按照图3的抽吸清洁设备的纵剖面;
24.图7根据分解视图示出抽吸清洁设备的局部区域,连同壳体封闭元件、腔室封闭元件和导引装置;
25.图8示出在组装状态下的根据图7的抽吸清洁设备的局部区域,同时壳体封闭元件和腔室封闭元件处于关闭位置;
26.图9示出在壳体封闭元件的位移运动的第一时刻的局部区域;
27.图10示出在壳体封闭元件的位移运动继续进行时的局部区域;
28.图11以立体俯视图示出根据图8的抽吸清洁设备的局部区域;
29.图12以立体俯视图示出根据图9的局部区域;
30.图13以立体俯视图示出根据图10的局部区域;
31.图14示出具有根据图11的局部区域的抽吸清洁设备;
32.图15示出具有根据图12的局部区域的抽吸清洁设备;
33.图16示出具有根据图13的局部区域的抽吸清洁设备;
34.图17示出具有壳体封闭元件和腔室封闭元件的封闭系统的另外的实施方式;
35.图18示出根据图17的实施方式的导引框架;
36.图19示出具有封闭的壳体开口的抽吸清洁设备的上侧面的立体俯视图;
37.图20示出具有集成在壳体封闭元件中的腔室封闭元件的抽吸清洁设备的另外的实施方式。
具体实施方式
38.图1至6示例性示出自主行进的吸尘机器人形式的抽吸清洁装置1,其具有马达驱动的轮子21(见图4至6)用于自主行进。此外,抽吸清洁设备1具有未示出的导航装置,抽吸清洁设备1借助该导航装置可以在环境中定向和定位。为此,抽吸清洁设备1例如具有测距装置,例如激光三角测量装置,其可以测量相对于环境中存在的障碍物的距离。根据测得的距离值,抽吸清洁设备1的计算装置生成环境地图,抽吸清洁设备1可以用环境地图计划环境中的行进行程或自身定位。然而,下文所述的发明不仅用于自主行进的抽吸清洁设备1,而且同样用于手动地由用户手持导引的抽吸清洁设备1。原则上本发明适用于所有抽吸清洁设备1,这些设备具有可再生的过滤腔4,过滤腔4可被外部抽吸装置20抽空。
39.在此示出的抽吸清洁设备1具有设备壳体2,在设备壳体中布置有风机3和过滤腔4。风机3配设有未进一步示出的电动机。过滤腔4通过抽吸通道24与抽吸口23相连。在抽吸清洁设备1的抽吸运行中,从待清洁的表面吸起的抽吸物可以通过抽吸口23和抽吸通道24进入过滤腔4,其中接着只有清洁后的空气流至风机3。抽吸口23配设有清洁元件22,在此例如围绕基本水平的轴线旋转的刷毛辊,其用于对待清洁的表面进行机械处理。除了示例性说明的清洁元件22或相对于此替选的是,抽吸清洁设备1还可以具有其他或另外的清洁元件22,例如擦拭元件和/或围绕基本垂直的轴线旋转的清洁元件22。为了避免与环境中的障碍物碰撞,抽吸清洁设备1优选具有未示出的障碍物传感器,例如超声波传感器。相对于抽吸清洁设备1的通常的向前运动,传感器优选在前方布置在抽吸清洁设备1的设备壳体2上。
40.在设备壳体2的上侧9上布置有壳体封闭元件7,壳体封闭元件7可逆地封闭壳体开口8。在壳体开口8打开时,用户或外部抽吸装置20可以到达布置在设备壳体2中的过滤腔4,即到达腔室开口6,在腔室封闭元件5的打开状态下腔室开口6露出至过滤腔4内部的入口。
41.如图4至图6所示地,壳体开口8和腔室开口6彼此间隔开并且单独构造地在一侧具有壳体封闭元件7,在另一侧具有腔室封闭元件5。
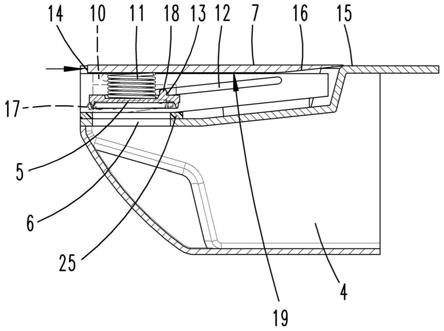
42.壳体封闭元件7和腔室封闭元件5机械地通过在此例如两个导引装置12和两个随动件10相互耦连。这由图7至图10示出。图7具体示出抽吸清洁设备1的局部区域的分解视图,该局部区域具有过滤腔4和壳体局部区域15,壳体局部区域15限定壳体开口8的边界。为了机械耦连,壳体封闭元件7和腔室封闭元件5通过随动件10连接,随动件具有未进一步示出的凸缘,所述凸缘支承在导引装置12中。导引装置12构造成导引槽的形式,其相对于壳体封闭元件7的底侧或者说下侧19具有锐角。两个随动件10和两个导引装置12相对于壳体开口8或者腔体开口6相互对置。在壳体封闭元件7和位于其下方的腔室封闭元件5之间还布置有弹簧元件11,所述弹簧元件11在此构造为压力弹簧并且压力弹簧的复位力将腔室封闭元件5从壳体封闭元件7推离。腔室封闭元件5尤其被相对于过滤腔4的密封元件25挤压,所述密封元件围绕腔室开口6的边缘。壳体封闭元件7与支承在导引装置12中的随动件10不可移动地连接。相反,腔室封闭元件5可移动地支承在随动件10上,即借助连接元件18支承,所述连接元件18啮合在随动件10的导引轨道13中。在壳体开口8或腔室开口6打开时,腔室封闭
元件5在随动件10上的可移动的支承首先实现腔室封闭元件5从密封元件25上基本沿垂直方向作用的抬起,并且然后在壳体封闭元件7或者说腔室封闭元件5的打开运动继续进行的情况下,实现腔室封闭元件5沿导引装置12移动,即基本水平或稍微向上导引的位移运动。随动件10借助复位元件17、即在此例如拉伸弹簧与导引装置12连接,其中,在随动件10沿打开方向移动时复位元件17被张紧。在随动件10上的打开力消失时,随动件10受复位元件17的复位力作用再次移位到初始位置中,初始位置与腔室封闭元件5和壳体封闭元件7的关闭状态一致。壳体封闭元件7在其下侧19上还具有导引斜坡16,(如图8至10所示)导引斜坡16实现壳体封闭元件7从限定壳体开口8的边界的壳体局部区域15的平面抬出并至少部分地在相邻的壳体局部区域15上方滑移。在与导引斜坡16对置的侧边缘上,壳体封闭元件7具有操纵区域14,通过操纵区域可以引入力,所述力导致壳体开口8的打开。例如,基站的可移位的局部区域或手动由用户导引的抽吸装置20可以作用在操纵区域14上。
43.图11至图13以及图14至图16以独特视图(图11至图13)示出根据图7的抽吸清洁设备1在组装状态中的局部区域以及集成到抽吸清洁设备1的情况(图14至图16)。
44.现在例如本发明这样作用,用户借助手动导引的抽吸装置20,例如手持吸尘器的吸嘴,向壳体封闭元件7的操纵区域14上施加力。力的施加基本平行于设备壳体2的上侧9进行,使得壳体封闭元件7通过在导引装置12中导引的随动件10移动。在此,壳体封闭元件7的导引斜坡16到达相邻的壳体局部区域15上方,而壳体封闭元件7沿上升的导引装置12移动。首先如图5和图9所示,腔室封闭元件5的连接元件18在随动件10的导引轨道13内移位。腔室封闭元件5以此从腔室开口6的密封元件25抬离并且然后可以沿基本水平的方向遵循导引装置12。在壳体开口8的打开位置中,壳体封闭元件7露出进入设备壳体2的入口,即尤其是过滤腔4的腔室开口6上的入口,使得外部抽吸装置20可以与过滤腔4的腔室开口6连接并进行再生。一旦作用在壳体封闭元件7上的、尤其操纵区域14上的力消失,例如方式是外部抽吸装置20从操纵区域14被移除,则随动件10和固定在随动件上的壳体封闭元件7从图6所示的打开位置被拉回根据图4的关闭位置中,这凭借在打开运动时张紧的复位元件17的复位力。在此,布置在壳体封闭元件7和腔室封闭元件5之间的弹簧元件11同样减小应力,弹簧元件11将腔室封闭元件5压回到密封元件25上。在此,腔室封闭元件5的连接元件18同时再次在随动件10的导引轨道13内移位。然后,腔室开口6又气密和灰尘密封地被封闭。
45.图17示出根据本发明的抽吸清洁设备1的另一种实施方式,其中,与根据图7的实施方式不同的是,具有腔室开口6的壳体局部区域15设计成具有两个部件。在此,上部的局部区域形成壳体外壁,当壳体开口8借助壳体封闭元件7封闭时,壳体封闭元件7位于该壳体外壁的平面内。壳体局部区域15的下部部分具有腔室开口6(并且优选也具有未示出的密封元件25)以及用于复位元件17的侧向的容纳部26,复位元件17用于壳体封闭元件7以及腔室封闭元件5返回移位到关闭位置中。与根据图4至图16的前述实施方式相反的是,用于腔室封闭元件5和壳体封闭元件7之间的连接的随动件10集成在导引框架27中,导引框架27相对于腔室封闭元件5的关闭位置沿周向围绕腔室开口6。导引框架27连同壳体封闭元件7相对于壳体局部区域15能抵抗复位元件17的复位力地移位到打开位置中。为了实现壳体封闭元件7和导引框架27的结合的移位,壳体封闭元件7具有销栓28,销栓28支承在导引框架7的对应的凹部29中。根据图18的视图,腔室封闭元件5布置在导引框架27内(不明显)并利用其连接元件18咬合在导引框架27的导引轨道13中,以便在导引框架27连同壳体封闭元件7和腔
室封闭元件5一起相对于壳体局部区域15移位之前,实现腔室封闭元件5相对于壳体局部区域15的垂直抬离。腔室封闭元件5相对于壳体封闭元件7的垂直移位由弹簧元件11控制,弹簧元件11将腔室封闭元件5通过导引框架27相对腔室开口6的边缘区域挤压。
46.图19示出壳体局部区域15连同位于关闭位置中的壳体封闭元件7的俯视图。可以看到操纵区域14,操纵区域14作为止挡元件突伸超出壳体局部区域15的表面平面并且可以由用户抓持或被外部的抽吸清洁设备1或基站的局部区域接触,以便使壳体封闭元件7和位于壳体封闭元件7上的导引框架27整体上相对于壳体开口8移位。
47.最后,图20示出抽吸清洁设备1的另一种替选实施方式,其具有壳体封闭元件7,腔室封闭元件5容纳在壳体封闭元件7中。因此,腔室封闭元件5由壳体封闭元件7包围。在此,腔室封闭元件5相对于壳体封闭元件7可移动地支承,以实现腔室封闭元件5从腔室开口6的密封元件25上的初始的抬离。为此,壳体封闭元件7又例如可以提供用于壳体封闭元件5的连接元件18(未示出)的导引轨道13(未示出)。然而替选的是,可以在壳体封闭元件7内部配设其他类型的导引滑槽,该导引滑槽实现腔室封闭元件5相对于壳体封闭元件7的相对运动。壳体封闭元件7又沿导引装置12相对于壳体局部区域15和腔室开口6移动。该导引装置12在此例如是在壳体局部区域15上形成的导引斜坡。导引装置12和/或壳体封闭元件7又可以配设一个复位元件17(或两个复位元件17),在操纵力消失时,复位元件可以将壳体封闭元件7移位返回到关闭位置中。
48.附图标记列表
[0049]1ꢀꢀꢀꢀꢀꢀꢀꢀ
抽吸清洁设备
[0050]2ꢀꢀꢀꢀꢀꢀꢀꢀ
设备壳体
[0051]3ꢀꢀꢀꢀꢀꢀꢀꢀ
风机
[0052]4ꢀꢀꢀꢀꢀꢀꢀꢀ
过滤腔
[0053]5ꢀꢀꢀꢀꢀꢀꢀꢀ
腔室封闭元件
[0054]6ꢀꢀꢀꢀꢀꢀꢀꢀ
腔室开口
[0055]7ꢀꢀꢀꢀꢀꢀꢀꢀ
壳体封闭元件
[0056]8ꢀꢀꢀꢀꢀꢀꢀꢀ
壳体开口
[0057]9ꢀꢀꢀꢀꢀꢀꢀꢀ
上侧
[0058]
10
ꢀꢀꢀꢀꢀꢀꢀ
随动件
[0059]
11
ꢀꢀꢀꢀꢀꢀꢀ
弹簧元件
[0060]
12
ꢀꢀꢀꢀꢀꢀꢀ
导引装置
[0061]
13
ꢀꢀꢀꢀꢀꢀꢀ
导引轨道
[0062]
14
ꢀꢀꢀꢀꢀꢀꢀ
操纵区域
[0063]
15
ꢀꢀꢀꢀꢀꢀꢀ
壳体局部区域
[0064]
16
ꢀꢀꢀꢀꢀꢀꢀ
导引斜坡
[0065]
17
ꢀꢀꢀꢀꢀꢀꢀ
复位弹簧
[0066]
18
ꢀꢀꢀꢀꢀꢀꢀ
连接元件
[0067]
19
ꢀꢀꢀꢀꢀꢀꢀ
下侧
[0068]
20
ꢀꢀꢀꢀꢀꢀꢀ
抽吸装置
[0069]
21
ꢀꢀꢀꢀꢀꢀꢀ
轮子
[0070]
22
ꢀꢀꢀꢀꢀꢀꢀ
清洁元件
[0071]
23
ꢀꢀꢀꢀꢀꢀꢀ
抽吸口
[0072]
24
ꢀꢀꢀꢀꢀꢀꢀ
抽吸通道
[0073]
25
ꢀꢀꢀꢀꢀꢀꢀ
密封元件
[0074]
26
ꢀꢀꢀꢀꢀꢀꢀ
容纳部
[0075]
27
ꢀꢀꢀꢀꢀꢀꢀ
导引框架
[0076]
28
ꢀꢀꢀꢀꢀꢀꢀ
销栓
[0077]
29
ꢀꢀꢀꢀꢀꢀꢀ
凹部。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1