一种食物烹煮机的制作方法
1.本发明涉及食品烹饪设备技术领域,特别涉及一种食物烹煮机。
背景技术:
2.烹饪设备在烹饪过程中一般会使用到牛肉酱、番茄酱等酱料和一些配菜,现有技术中,酱料一般盛放在瓶子里,通过按压或者挤压将酱料挤出,如专利号为cn207264504u的专利公开了一种现制面食自动贩卖机,酱料添加装置包括固定设置在中心的出料压杆和绕中心旋转的酱料平台,所述酱料平台上设置有若干组均匀分布的酱料瓶,所述酱料瓶上端设置有出料臂,所述出料臂连通酱料瓶,所述出料压杆向下按压出料臂时,酱料从出料臂中挤出;其中食物单元存储格包括若干组储存格和储存槽,设置有三个食物单元存储格,分别装有牛腩、肉丸和青菜等顾客日常喜好的食物,储存格包括柱型的储物空间、设置在储存格上表面的插销孔和串针件,所述串针件包括与插销孔配合固定的l型插销、与组合夹具配合使用的夹持柄和用于串接固定食物的串针,通过机械手夹持串针件,依靠饭盒边缘将食物刮落于饭盒内,完成加料菜品的添加。
3.上述的瓶装的酱料开口开口后空气会进入内部,存放时间短且容易变质;另外,配菜需要事先穿在串针上,以方便会对食材造成破坏,影响口感,另一方面,清洗完后再进行串食材过程中容易造成再次污染,存在卫生安全隐患。
技术实现要素:
4.为了解决现有技术存在的现有的烹饪设备食材不够安全卫生的问题,本发明提供一种通过料包供应酱料和料格供应配菜的方式来保证食材卫生的食物烹煮机。
5.本发明解决其技术问题所采用的技术方案是:
6.一种食物烹煮机,包括:
7.食物烹煮机构,所述的食物烹煮机构包括盛放有用于烹饪食物的液体的锅体,锅体内设有用于盛放待烹饪食物的容器;
8.主食供应机构,所述的主食供应机构向容器中输入待烹主食;
9.碗具供应机构,所述的碗具供应机构逐个供应碗具;
10.转运机构,转运机构在若干设定位置之间转运;
11.酱料供应机构,所述的酱料供应机构向碗具中投放酱料,酱料供应机构包括料包供应机构、用于划开料包的划刀和用于拿取料包并将其挤出的夹挤机构;
12.配菜供应机构,所述的配菜供应机构包括若干循环移动至取放料位的料格,所述的转运机构将料格的配菜转运至容器内;
13.汤液供应机构,所述的汤液供应机构向碗具中注入汤液;
14.还包括工作台,用于放置物品。
15.进一步的,所述的转运机构包括至少一个转运机械手,转运机械手的端部设有电磁吸附机构。
16.进一步的,所述的电磁吸附机构包括环形基座,所述的环形基座设有环形槽,所述的环形槽内置有导电线圈,所述的环形基座上还设有用于将导电线圈覆盖的环形盖。
17.进一步的,所述的容器上设有与电磁吸附机构配合的磁吸块,所述的容器为挂娄,锅体中设置至少一个挂娄,所述的挂娄底部没入锅体内的液体中,食物烹煮机构还包括驱动内部盛有食物的挂娄运动至指定位置以便转运机构拿取的移动机构,所述的移动机构包括位于锅体的锅沿上方的用于放置容器的承载盘,所述的承载盘上固定有便于所述的挂娄的手柄悬挂的固定架,固定架包括用于套住挂娄外侧从而实现挂娄悬挂的挂圈,所述的承载盘下端固定有齿圈,所述的齿圈上固定有若干销轴,所述的销轴上安装有第一陶瓷轴承,所述的第一陶瓷轴承外圈与锅体外壁接触并沿锅体外壁滚动,且若干第一陶瓷轴承沿锅体中心线周向均布,锅体上固定有第一动力机组,所述的第一动力机组的输出端连接有与齿圈啮合的齿轮。
18.进一步的,所述的承载盘下端安装有第二陶瓷轴承,所述的第二陶瓷轴承在锅体的锅沿上滚动,所述的锅体上固定有底环,所述的第一动力机组固定在底环上,所述的底环上固定连接有顶环,所述的顶环位于锅体的上方,所述的顶环上固定有风机。
19.进一步的,所述的碗具供应机构包括支撑主体,支撑主体上设有下料通道,若干叠放的碗具置于下料通道中,下料通道的末端设置有逐个下料机构,逐个下料机构包括将末端的碗具卡住或松开的至少两个卡手,卡手连接有驱动其运动的驱动机构,所述的碗具供应机构还包括便于托取碗具的叉托,所述的叉托上设有与电磁吸附机构配合的磁吸块。
20.进一步的,所述的驱动机构包括转动连接在所述的支撑主体上的转轴,所述的卡手与转轴固定连接,每个转轴对应固定连接有转臂,所有转臂共同连接有用于驱动其往复摆动的往复运动机构,所述的往复运动机构包括与支撑主体固定连接的电机,所述的电机连接有滚珠丝杠,所述的滚珠丝杠的丝杠螺母上固定有同步连杆,所述转臂均与同步连杆铰接。
21.进一步的,所述的料包供应机构将料包逐个输送至取料位,所述的料包供应机构包括若干支撑板,所述的支撑板上固定有第二动力机组,所述的第二动力机组输出端连接有主动轴,所述的主动轴上固定有至少一个主动链轮,所述的支撑板上还转动连接有从动轴,所述的从动轴上固定有与主动链轮一一对应的从动链轮,每一对主动链轮和从动链轮之间连接有链条,所述的链条上固定有隔板,相邻隔板之间形成用于容纳料包的隔仓,所述的料包供应机构底部设有防止料包掉落的托板,支撑板上设有用于检测料包是否用完的检测机构,所述的支撑板上设有用于调整从动轴位置从而调整链条松紧程度的调节结构。
22.进一步的,所述的夹挤机构为夹挤一体机构,夹挤一体机构拿取位于取料位的料包,所述的夹挤一体机构上也设有与电磁吸附机构配合的磁吸块,所述的夹紧一体机构包括安装板,所述的安装板上设有第一气缸手指和第二气缸手指,第一气缸手指的两个指头上分别固定有一个用于夹住料包的第一封口边的第一夹爪,第二气缸手指的两个指头上分别固定有一个用于夹住料包的第二封口边的第二夹爪,第二夹爪一一对应固定连接或一体成型有挤料块,且挤料块远离第二夹爪的一侧靠近第一夹爪,第一夹爪和第二夹爪处于夹紧状态时,每对挤料块之间具有间隙,所述的安装板上还设有供第二气缸手指滑动的滑轨,所述的第二气缸手指沿靠近和远离第一气缸手指滑动。
23.进一步的,所述的配菜供应机构包括架体,所述的架体上设有两层滑道,滑道上滑
动设有若干所述的料格,滑道两侧分别设有第一通道和第二通道,所述的第一通道和第二通道中分别设有第一升降板和第二升降板,所述的架体上在第一滑道的端部设有第一推送气缸,第一推送气缸活塞杆固定有用于推送料格的第一推送板,所述的架体上在第二滑道的端部设有第二推送气缸,第二推送气缸的活塞杆固定有用于推送料格的第二推送板,所述的料格一端开口。另一端固定有与电磁吸附机构配合的磁吸块。
24.有益效果:
25.(1)本发明的食物烹煮机构,结构布置合理,各机构配合度高,整体工作效率高,可实现面食等的机械化烹饪,现场制作,保证了食品的新鲜度,而且单独料包和单独料格盛装配菜形式,保证食材健康卫生;
26.(2)食物烹煮机构的承载盘周向通过在齿圈上设置第一陶瓷轴承与锅体配合外部,通过第二陶瓷轴承在锅沿上滚动实现承载盘的支撑,锅体内壁不需要预留安装位置,这样安装过程更简单,并且不存在污染食物的风险;第一陶瓷轴承直接安装在齿圈上,这样将导向限位结构和驱动机构通过齿圈集成,减少零件,简化结构,节省成本,避免零件过多产生干涉问题;第一陶瓷轴承和第二陶瓷轴承的材质符合食品设备要求,不生锈,耐高温;
27.(3)面条机制作的面条直接输入挂娄中进行烹煮,无二次传递,干净卫生;
28.(4)碗具供应机构通过卡手的夹紧和松开来逐个分放碗具,结构简单,容易实现,成本低;两侧卡手采用同一个电机驱动,保证动作同步性的同时能够简化结构,节省成本,配合叉托形式,叉托下降一定的高度,然后卡手再夹住倒数第二个碗具,人工或者机械手就可将末端的碗具取走,防止一次落下多个碗具,保证了操作精度;
29.(5)本发明的酱料添加机构采用单独料包进行上料,密封性能好,干净卫生,保质期长;可通过夹取机构夹取料包,然后通过挤料机构将酱料挤出,可充分将酱料挤出,防止浪费;夹取机构与挤料机构一体设置,可以节省空间,挤料块集成在第二夹爪上,跟随夹爪一起运动,无需额外的动力,节省成本;
30.(6)本发明的配菜供应机构只需要将配菜散装放置在料格中,然后对料格进行传送,食材不需要额外的捆扎或者串针,操作简单,难度低,而且保证食材的卫生;推送机构为在滑道两端设置的气缸,易于实现,成本低,且推动机构设置在端部,便于零件的维护。
附图说明
31.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域的普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他附图。
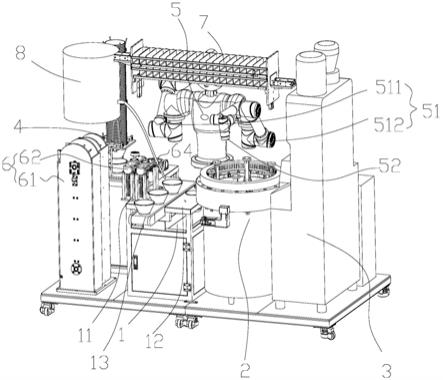
32.图1为本发明的食物烹煮机的外部结构图;
33.图2为本发明的食物烹煮机的内部结构图;
34.图3为本发明的食物烹煮机构的第一立体图;
35.图4为本发明的食物烹煮机构的第二立体图;
36.图5为本发明的电磁吸附机构的剖视图(内部接线形式);
37.图6为本发明的电磁吸附机构的内部结构图(外部接线形式);
38.图7为碗具供应机构的立体图;
39.图8为叉托的结构示意图;
40.图9为料包供应机构的外部立体图;
41.图10为料包供应机构的内部立体图;
42.图11为夹挤一体机构的立体图;
43.图12为料包及划开位置的结构示意图;
44.图13为配菜供应机构的第一立体图;
45.图14为配菜供应机构的第二立体图;
46.图15为料格的结构示意图。
47.其中,1、工作台,11、第一放置架,12、第二放置架,13、输送带
48.2、食物烹煮机构,21、锅体,22、挂娄,23、承载盘,24、固定架,241、挂圈,25、底环,26、顶环,27、风机,28、第一动力机组,29、齿轮,210、齿圈,211、销轴,212、第一陶瓷轴承,213、第二陶瓷轴承,
49.3、主食供应机构,
50.4、碗具供应机构,41、碗具,42、卡手,43、转轴,44、转臂,45、电机,46、滚珠丝杠,47、丝杠螺母,48、同步连杆,49、叉托,
51.5、转运机构,51、转运机械手,511、第一机械手,512、第二机械手,52、电磁吸附机构,521、环形基座,522、导电线圈,523、环形盖,53、磁吸块,
52.6、酱料供应机构,61、料包供应机构,611、链条,612、隔板,613、托板,614、支撑板,615、第二动力机组,616、主动轴,617、主动链轮,618、从动轴,619、从动链轮,6111、轴承座,6112、顶紧螺丝,6113、顶紧螺丝座,6114、螺母,62、夹挤一体机构,621、第一夹爪,622、第二夹爪,623、挤料块,624、第一气缸手指,625、第二气缸手指,626、滑轨,627、安装板,63、料包,631、第一封口边,632、第二封口边,64、划刀,65、取料位,
53.7、配菜供应机构,71、架体,72、料格,73、滑道,74、第一通道,75、第二通道,76、第一升降板,77、第二升降板,78、第一推送气缸,79、第一推送板,710、第二推送气缸,711、第二推送板,712、取放料位,
54.8、汤液供应机构。
具体实施方式
55.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本发明及其应用或使用的任何限制。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
56.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本技术的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
57.除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本发明的范围。同时,应当明白,为了便于描述,附图中所示出的各个部
分的尺寸并不是按照实际的比例关系绘制的。对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为授权说明书的一部分。在这里示出和讨论的所有示例中,任何具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它示例可以具有不同的值。应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步讨论。
58.在本发明的描述中,需要理解的是,方位词如“前、后、上、下、左、右”、“横向、竖向、垂直、水平”和“顶、底”等所指示的方位或位置关系通常是基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,在未作相反说明的情况下,这些方位词并不指示和暗示所指的装置或元件必须具有特定的方位或者以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制;方位词“内、外”是指相对于各部件本身的轮廓的内外。
59.为了便于描述,在这里可以使用空间相对术语,如“在
……
之上”、“在
……
上方”、“在
……
上表面”、“上面的”等,用来描述如在图中所示的一个器件或特征与其他器件或特征的空间位置关系。应当理解的是,空间相对术语旨在包含除了器件在图中所描述的方位之外的在使用或操作中的不同方位。例如,如果附图中的器件被倒置,则描述为“在其他器件或构造上方”或“在其他器件或构造之上”的器件之后将被定位为“在其他器件或构造下方”或“在其他器件或构造之下”。因而,示例性术语“在
……
上方”可以包括“在
……
上方”和“在
……
下方”两种方位。该器件也可以其他不同方式定位(旋转90度或处于其他方位),并且对这里所使用的空间相对描述作出相应解释。
60.此外,需要说明的是,使用“第一”、“第二”等词语来限定零部件,仅仅是为了便于对相应零部件进行区别,如没有另行声明,上述词语并没有特殊含义,因此不能理解为对本发明保护范围的限制。
61.如图1和图2,一种食物烹煮机,包括:
62.食物烹煮机构2,食物烹煮机构2包括盛放有用于烹饪食物的液体的锅体21,锅体21内设有用于盛放待烹饪食物的容器;
63.主食供应机构3,主食供应机构3向容器中输入待烹主食;主食供应机构可以是面条机;
64.碗具供应机构4,碗具供应机构4逐个供应碗具41;
65.转运机构5,转运机构5在若干设定位置之间转运。
66.酱料供应机构6,所述的酱料供应机构6向碗具41中投放酱料,酱料供应机构6包括料包供应机构61、用于划开料包63的划刀64和用于拿取料包63并将其挤出的夹挤机构;
67.配菜供应机构7,配菜供应机构7包括若干循环移动至取放料位的料格72,转运机构将料格72的配菜转运至容器内;
68.汤液供应机构8,汤液供应机构8向碗具41中注入汤液;汤液供应机构8上可在管道设置阀体来控制汤液的流出。
69.工作台1,用于放置物品,
70.食物烹煮机还包括用于将盛放有烹饪完成食物的碗具41输出的输送带。
71.本发明的食物烹煮机外部具有机壳,机壳上可以设置面板,可以是触屏等形式,消费者通过选择相应的选项并扫码支付,便可等待拿取食物,方便卫生,食物烹煮机底部具有
托盘,上述机构均设置在托盘上,托盘底部具有滚轮,便于整个食物烹煮机的移动。
72.如图5和图6,转运机构5包括至少一个转运机械手51,转运机械手51的端部设有电磁吸附机构52。电磁吸附机构52包括环形基座521,环形基座521设有环形槽,环形槽内置有导电线圈522,环形基座521上还设有用于将导电线圈522覆盖的环形盖523。环形基座521和环形盖523的材料均为铁。这种结构的环形基座521中心的通孔吸力较大,能够吸附住对应磁吸块53,图5为中心出线方式,图6为外部出线方式。
73.如图3和图4,容器上设有与电磁吸附机构52配合的磁吸块53,容器为挂娄22,锅体21中设置至少一个挂娄22,挂娄22底部没入锅体21内的液体中,食物烹煮机构2还包括驱动内部盛有食物的挂娄22运动至指定位置以便转运机构5拿取的移动机构,移动机构包括位于锅体21的锅沿上方的用于放置容器的承载盘23,承载盘23上固定有便于挂娄22的手柄悬挂的固定架24,固定架24包括用于套住挂娄22外侧从而实现挂娄22悬挂的挂圈241,承载盘23下端固定有齿圈210,齿圈210上固定有若干销轴211,销轴211上安装有第一陶瓷轴承212,第一陶瓷轴承212外圈与锅体21外壁接触并沿锅体21外壁滚动,且若干第一陶瓷轴承212沿锅体21中心线周向均布,锅体21上固定有第一动力机组28,第一动力机组28的输出端连接有与齿圈210啮合的齿轮29。
74.承载盘23下端安装有第二陶瓷轴承213,第二陶瓷轴承213在锅体21的锅沿上滚动,锅体21上固定有底环25,第一动力机组28固定在底环25上,底环25上固定连接有顶环26,顶环26位于锅体21的上方,顶环26上固定有风机27。
75.如图7和图8,碗具供应机构4包括支撑主体,支撑主体包括顶板和底板,顶板与底板之间通过连接柱固定连接,底板用于承接落下的碗具,顶板中心设有与下料通道对应的通孔,顶板上还设有用于避让卡手的缺槽,支撑主体上设有下料通道,支撑主体上固定有若干保持杆,若干保持杆合围成下料通道,若干叠放的碗具41置于下料通道中,下料通道的末端设置有逐个下料机构,逐个下料机构包括将末端的碗具41卡住或松开的至少两个卡手42,卡手42连接有驱动其运动的驱动机构,碗具供应机构4还包括便于托取碗具41的叉托49,叉托49上设有与电磁吸附机构52配合的磁吸块53。下料通道可以竖直方向设置,碗具利用重力下落,当然也不限于这种形式,也可以沿其他方向,沿其他方向设置的话可以根据情况设置推动装置。
76.驱动机构包括转动连接在支撑主体上的转轴43,卡手42与转轴43固定连接,每个转轴43对应固定连接有转臂44,所有转臂44共同连接有用于驱动其往复摆动的往复运动机构,往复运动机构包括与支撑主体固定连接的电机45,电机45为步进电机,电机45连接有滚珠丝杠46,滚珠丝杠46的丝杠螺母47上固定有同步连杆48,所述转臂44均与同步连杆48铰接。
77.如图9和图10,料包供应机构61将料包63逐个输送至取料位65,料包供应机构61包括若干支撑板614,支撑板614上固定有第二动力机组615,第二动力机组615输出端连接有主动轴616,主动轴616上固定有至少一个主动链轮617,支撑板614上还转动连接有从动轴618,从动轴618上固定有与主动链轮617一一对应的从动链轮619,每一对主动链轮617和从动链轮619之间连接有链条611,链条611上固定有隔板612,相邻隔板612之间形成用于容纳料包63的隔仓,料包供应机构61底部设有防止料包63掉落的托板613,支撑板614上设有用于检测料包63是否用完的检测机构,隔仓转动到某一特定位置设定为取料位65,检测机构
设置在取料位65的上游,可以是采用光电开关等形式,料包63高出隔板612,这样能够检测到是否有料包63通过。
78.支撑板614上设有用于调整从动轴618位置从而调整链条611松紧程度的调节结构。从动轴618通过轴承座6111安装在支撑板614上,轴承座6111上设置腰孔,调节结构包括设置在轴承座6111下方用于顶住轴承座6111的顶紧螺丝6112,支撑板614上还固定有用于支撑顶紧螺丝6112的顶紧螺丝座6113,顶紧螺丝6112上配合有螺母6114,螺母6114抵在顶紧螺丝座6113上。链条611如果松动,会影响传送位置,不能到达取料位65,从而难以与机械手取料节奏匹配,所以通过调整结构将链条611调整至适当位置。通过轴承座6111腰孔和螺栓对轴承座6111水平方向进行限位,然后通过顶紧螺丝6112将轴承座6111在竖直方向上顶紧从而实现竖直方向上的限位。
79.夹挤机构可以分开设置为夹取机构和挤料机构,如夹取机构可以为两个夹住,挤料机构为设置两个夹爪之间的挤料爪,本发明中,如图11和图12,夹挤机构设置为夹挤一体机构62,夹挤一体机构62拿取位于取料位65的料包,夹挤一体机构62上也设有与电磁吸附机构52配合的磁吸块53,夹紧一体机构包括安装板627,安装板627上设有第一气缸手指624和第二气缸手指625,第一气缸手指624的两个指头上分别固定有一个用于夹住料包63的第一封口边631的第一夹爪621,第二气缸手指625的两个指头上分别固定有一个用于夹住料包63的第二封口边632的第二夹爪622,第二夹爪622一一对应固定连接或一体成型有挤料块623,且挤料块623远离第二夹爪622的一侧靠近第一夹爪621,第一夹爪621和第二夹爪622处于夹紧状态时,每对挤料块623之间具有间隙,安装板627上还设有供第二气缸手指625滑动的滑轨626,第二气缸手指625沿靠近和远离第一气缸手指624滑动。酱料可以是多种,对应的料包供应机构61和夹挤一体机构62就是多个。
80.如图13~15,配菜供应机构7包括架体71,架体71上设有两层滑道73,滑道73上滑动设有若干用于盛装配菜的料格72,滑道73两侧分别设有第一通道74和第二通道75,第一通道74和第二通道75中分别设有第一升降板76和第二升降板77,第一升降板76和第二升降板77分别连接有升降气缸,架体71上在第一滑道73的端部设有第一推送气缸78,第一推送气缸78活塞杆固定有用于推送料格72的第一推送板79,架体71上在第二滑道73的端部设有第二推送气缸710,第二推送气缸710的活塞杆固定有用于推送料格72的第二推送板711,料格72一端开口,另一端固定有与电磁吸附机构52配合的磁吸块53。架体71上还设有用于检测位于取放料位712上游的料格72中是否还有配菜的检测装置。
81.工作台1可以放置碗具,工作台1上设有若干用于放置夹挤一体机构62的第一放置架11、用于放置容器的第二放置架12和将装有烹饪好的食物的碗具输出的输送带13。
82.本发明中,转运机械手51包括第一机械手511和第二机械手512,均安装在转运机器人上,其中第一机械手511负责拿取碗具41和拿取料包63并将酱料投放到碗具41中,第二机械手512负责拿取料格72并将配菜放入挂娄22中和将挂娄22中烹熟的食物放入碗具41中。
83.工作原理:
84.根据第一机械手511和第二机械手512的操作范围分为第一动作模块和第二工作模块:第一动作模块和第二动作模块同步进行,或者至少第一动作模块先进行。
85.第一动作模块:
86.1)取碗:首先,第一机械手511拿取叉托49将叉托49套在碗具供应机构4的最末端的碗具41下方并保持不动,起到承托所有碗具411的作用,电机45正转,丝杠螺母47向下运动,带动转臂44和转轴43转动,卡手42松开最末端的碗具41,卡手42松开后,第一机械手511带动叉托49下降一定的高度,这样所有的碗具41都下降一定高度,紧接着电机45反转,丝杠螺母47向上运动,带动转臂44和转轴43转动,下降的高度使得卡手42复位后正好夹住倒数第二个碗具41,第一机械手511就可将末端的碗具41取走,并将碗具放置在指定位置,第一机械手511松开叉托49,可以将叉托49就地放下或者放置在其他位置;
87.2)投入酱料:夹挤一体机构62被第一机械手511从第一放置架11上拿取,然后到达料包供应机构61的取料位65,第一夹爪621和第二夹爪622分别夹取料包63的第一封口边631和第二封口边632,并将料包63取出;夹挤一体机构62带动料包63至划刀64位置,并将料包63靠近第二夹爪622的一侧靠向划刀64并移动,使得料包63被划刀64划开,划开位置如图12,这样第二封口边632留在第二夹爪62上,料包63的其他部分留在第一夹爪621上,考虑到划刀出会粘上酱料,可以在划刀64附近设置擦刀机构或者喷水机构对划刀64进行清洗,防止划刀64上残留的酱料对下次划开的料包63产生污染;然后夹挤一体机构62带动划开的料包63至需要投放酱料的位置,然后第二气缸手指625沿滑轨626运动,带动挤料块623从靠近第一夹爪621位置向远离第一夹爪621位置运动,从而料包63两侧的挤料块623配合将料包63中的酱料挤出;夹挤一体机构62运动至指定丢弃位置,第一夹爪621和第二夹爪622松开,将废料丢弃;料包供应机构61的第二动力机组515带动链条611旋转,继续向取料位65供应料包63,旋转过程中,检测机构进行检测,若检测到有料包63通过,则继续工作,检测机构若没有检测到料包63通过,则停止动作并报警,进行补充料包63。
88.3)注汤:汤液供应机构8向碗具41中注入汤液:
89.第二动作模块:
90.1)煮面:主食供应机构3(可以采用面条机)将一定量的面条直接输入至食物烹煮机构2的挂娄22中,锅体21内的液体可以是持续加热的热水,对面条进行加热,承载盘23在隔一段时间进行旋转;
91.2)放入配菜:初始位置时,第一升降板76上升至取放料位712,即第一升降板76与位于上层的滑道73齐平,此时第二升降板77与位于上层的滑道73平齐,且第二升降板7上有料格72,第一推送气缸78推送料格72使得取放料位712上游的料格72推送至第一升降板76,第一升降板76的料格72被第二机械手512拿走并将料格72中的配菜倒出至指定位置的挂娄22(配菜可以和面条同时加入,也可以面条煮一段时间后加入配菜,根据配菜的种类及煮熟的容易程度设定),清空的料格72被重新放回第一升降板76,第一推送气缸78带动第一推送板79缩回;然后第一升降板6和第二升降板77同时下降,第二推送气缸710推送下层的料格72,使得第二升降板77旁边的料格72推送至第二升降板77上,同时第一升降板76上的料格72被推走,第二升降板77带动料格72上升,第二推送气缸710带动第二推送板711缩回;第一升降板76重新上升至取放料位712,然后重复上面的动作。在此过程中,通过检测装置14检测取放料位712上游的料格72中是否还有配菜,若检测还有配菜,则进行动作,若检测无配菜,则停止动作,并提醒添加配菜;
92.第一动作模块和第二动作模块的上述动作完成后,第一机械手511重新拿取叉托49并将已经注入酱料和汤料的碗具41托起:第二机械手512拿取指定位置(可以设定为最近
位置)的挂娄22并将挂娄22中烹熟的面条和配菜倒入已经注入酱料和汤料的碗具41中;第一机械手511最后将装有烹熟食物的碗具41放置至输送带13输出。
93.以上,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1