餐具清洗机的制作方法
1.本发明涉及一种餐具清洗机。
背景技术:
2.日本特开2006-334125号公报公开以往的餐具清洗机的一例。该餐具清洗机具备清洗槽、清洗装置、送风机构、温度监测机构以及控制部。
3.清洗槽用于收容被清洗物。清洗装置由喷嘴以及清洗泵构成,能够向清洗槽内供给清洗水。送风机构用于将清洗槽内的空气向机外排出。温度监测机构用于监测清洗槽内的清洗水的温度。控制部用于控制清洗装置以及送风机构。
4.而且,控制部执行:利用清洗水对收容在清洗槽的被清洗物进行清洗的清洗工序、以及利用清洗水对清洗工序之后的被清洗物进行冲洗的冲洗工序。此时,当温度监测机构所监测到的清洗水的温度达到规定的开始温度时,控制部使送风机构连续性地或者间歇性地运转。这样,在该餐具清洗机,通过将清洗槽内的蒸气强制性地排出到机外,能够抑制洗涤台的顶板上的结露。
5.然而,例如,在室温不同的夏季和冬季,在餐具清洗机周边亦即洗涤台的顶板等上结露的程度各不相同。另外,例如,即便是在因为各式各样的外因而导致室温变化的开放的设置环境、以及因为空调而使得室温稳定的封闭的设置环境下,在餐具清洗机的周边结露的程度也会不同。
6.由此,如上述以往的餐具清洗机那样,只要是清洗水的温度达到规定的开始温度就使送风机构进行运转,由此,无论季节或设置环境如何都很难能够稳定地抑制餐具清洗机的周边上的结露。
技术实现要素:
7.所以,提供一种无论季节或设置环境如何都能够稳定地抑制餐具清洗机的周边上的结露的餐具清洗机是本发明的非限定的课题之一。该课题通过技术方案1的方案而完成。本发明的进一步的发展形式在从属技术方案中进行了记述。
8.本发明的餐具清洗机具备:用于收容被清洗物的清洗槽、能够向所述清洗槽内供给清洗水的清洗装置、将所述清洗槽内的空气排出到机外的送风机构、对所述清洗槽内的所述清洗水的温度进行监测的温度监测机构、以及对所述清洗装置以及所述送风机构进行控制的控制部,所述控制部执行:利用所述清洗水对收容于所述清洗槽的所述被清洗物进行清洗的清洗工序、以及利用所述清洗水对所述清洗工序之后的所述被清洗物进行冲洗的冲洗工序,而且,当所述温度监测机构所监测到的所述清洗水的温度达到规定的开始温度时,所述控制部执行:以规定的风量使所述送风机构进行运转的结露抑制动作,在所述餐具清洗机中,还具备对室温进行监测的室温监测机构,所述控制部在执行所述结露抑制动作之前,所述室温监测机构所监测到的所述室温越低,就越降低所述开始温度。
9.在本发明的餐具清洗机中,控制部在执行结露抑制动作之前,室温监测机构所监
测到的室温越低,就越降低规定的开始温度。由此,例如,相比于室温较高的夏季而言,控制部更加降低室温较低的冬季这一方的开始温度。另外,例如,即便是在因为各式各样的外因而导致室温变化的开放的设置环境下,那种时不时的室温越低,控制部就会越发降低开始温度。其结果,控制部在与室温相对应的适当时机执行结露抑制动作,从而能够将清洗槽内的蒸气强制性地排出到机外。
10.所以,根据本发明的餐具清洗机,无论季节或设置环境如何都能够稳定地抑制餐具清洗机的周边上的结露。
11.在本发明的另一方式中,优选,温度监测机构所监测到的清洗水的温度越高,控制部就越增加结露抑制动作中的风量。
12.这种情况下,清洗槽内的清洗水的温度变高而产生的蒸气是结露原因所在,当变成了清洗槽内容易产生蒸气的环境的那种程度时,就会增加送风机构的风量。其结果,根据该餐具清洗机,在控制部执行结露抑制动作的期间,能够极其可靠地将清洗槽内的蒸气排出到机外,因此,能够进一步抑制餐具清洗机的周边上的结露。
13.在本发明的又一方式中,优选,控制部执行:开始清洗工序之前利用温度监测机构对清洗槽内的空气的温度进行监测的开始前监测动作,并将通过开始前监测动作而获取到的空气的温度推定为室温。而且,优选,执行开始前监测动作时的温度监测机构为室温监测机构。
14.这种情况下,已有的温度监测机构兼用作室温监测机构,因此,与重新设置室温监测机构的情况相比,能够实现制造成本的廉价化。
15.本发明中的其他方式以及优点可以根据以下的描述以及添附的附图所公开的实施例、该附图所例示的图解、以及、说明书以及该附图的整体所公开的本发明的概念而明显获知。
附图说明
16.图1是实施例1的餐具清洗机的示意截面图。
17.图2是实施例1的餐具清洗机的框图。
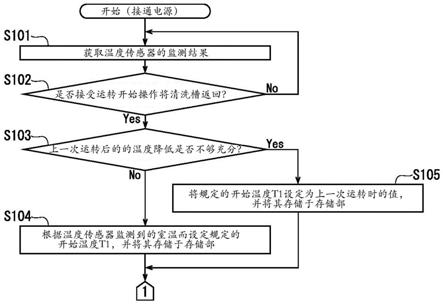
18.图3是清洗运转程序的流程图。
19.图4是清洗运转程序的流程图。
20.图5是清洗运转程序的流程图。
21.图6是表示室温与规定的开始温度之间的关系的图表。
22.图7是表示清洗水的温度和规定的开始温度之间的差值、与规定的风量之间的关系的表。
23.图8是实施例2的餐具清洗机所涉及的清洗运转程序的流程图。
24.附图符号说明
[0025]1…
餐具清洗机;tw1
…
被清洗物(餐具);7
…
清洗槽;61、62
…
清洗装置(61
…
喷嘴、62
…
泵);68
…
送风机构(送风风扇);31
…
温度监测机构(温度传感器);c1
…
控制部;t1
…
规定的开始温度;w1
…
规定的风量;31、32
…
室温监测机构(31
…
执行开始前监测动作时的温度传感器、32
…
室温传感器)。
具体实施方式
[0026]
下面,参照附图,说明本发明所涉及的实施例1、2。
[0027]
实施例1
[0028]
如图1所示,实施例1的餐具清洗机1是本发明的餐具清洗机的具体方式的一例。餐具清洗机1是在组合式厨房的顶板ct1的下方设置的且前表面抽拉式的清洗机。
[0029]
壳体、清洗槽以及盖体
[0030]
餐具清洗机1具备壳体9、清洗槽7以及盖体8。在本实施例中,将与大致箱状体亦即壳体9中的与利用组合式厨房的用户相对峙的侧面侧、亦即图1的纸面左侧规定为壳体9的前表面侧,将图1的纸面右侧规定为壳体9的里侧。
[0031]
壳体9的上部被顶板ct1覆盖。壳体9具有壳体开口9h。壳体开口9h在壳体9的前部的上端至下端为止的宽阔范围呈开放,并使壳体9内部与外部连通。
[0032]
清洗槽7被收容于壳体9内。图1所示的清洗槽7的位置为收容位置。在大致箱状体亦即清洗槽7的侧面、与壳体9的内壁面之间配置有未图示的滑轨机构。虽然省略了图示,清洗槽7通过该滑轨机构而能够相对于壳体9滑动。
[0033]
清洗槽7具有开口7h。开口7h使得清洗槽7的上部呈开放。在清洗槽7的前部的上端设置有把手7g。
[0034]
用户把持把手7g,通过手动操作而使清洗槽7从收容位置朝向壳体9的前方滑动,由此虽然省略了图示,成为:清洗槽7被从壳体9拉出到前方的状态。另外,用户通过手动操作而使被拉出的状态下的清洗槽7朝向壳体9的里侧滑动,能够使得清洗槽7回复到收容位置。
[0035]
盖体8配置在壳体9内的上部,能够对清洗槽7的开口7h进行封堵或使之开放。盖体8通过未图示的联动机构而与清洗槽7的滑动相联动地在图1所示的位置、与省略了图示的下述位置之间进行上下移动,即,该位置是:从图1所示的位置开始上升而允许清洗槽7滑动的位置。
[0036]
在清洗槽7处于收容位置的状态下,对壳体开口9h进行封堵,而且开口7h通过盖体8而被封堵。
[0037]
虽然省略了图示,但是,在清洗槽7从壳体9被拉出的状态下,通过留在壳体9内的盖体8,露出到壳体9的外部的开口7h被打开。据此,用户能够经由开口7h而将餐具tw1收容在清洗槽7中,或者将餐具tw1从清洗槽7中取出。
[0038]
餐具tw1例如为:茶碗、盘、玻璃杯等餐饮用器皿、或者筷子、勺子、叉子等餐饮用具等。餐具tw1是本发明的“被清洗物”的一例而已。
[0039]
在壳体9内设置有:供水管p1、供水电磁阀69以及排水管p2。供水管p1用于从在餐具清洗机1的外部设置的未图示的供水源向清洗槽7内供水。供水电磁阀69对供水管p1进行开闭,来切换水朝向清洗槽7的供给及其停止。排水管p2用于将清洗槽7内的清洗水排出到餐具清洗机1的外部。
[0040]
在清洗槽7内的底部设置有用于储存清洗水的储水部71。另外,在清洗槽7内配置有餐具篮70。餐具tw1载放在餐具篮70。
[0041]
在清洗槽7设置有排气通路79。排气通路79通过在清洗槽7的前表面上的把手7g的下方呈开口的排气口79a而与清洗槽7的外部连通。排气通路79上的与排气口79a相反侧的
连通口79b是:在将清洗槽7内的餐具篮70进行包围的内壁面上呈开口。排气通路79在排气口79a与连通口79b之间,弯折成大致s字形状。清洗槽7内的空气经过排气通路79而被排出到机外,亦即被排出到壳体9的前方。
[0042]
在本实施例中,在排气通路79没有设置:通过送风压力的有无而进行开闭的摆动式闸门。由此,排气通路79总是从连通口79b连通到排气口79a。
[0043]
喷嘴以及泵
[0044]
餐具清洗机1还具备喷嘴61以及泵62。喷嘴61以及泵62是本发明的“清洗装置”的一例。喷嘴61配置在清洗槽7内。泵62组装在清洗槽7的储水部71的下部。喷嘴61以及泵62在清洗槽7被拉出推入之时与清洗槽7一起移动。
[0045]
喷嘴61能够将清洗水从多个排出孔向清洗槽7内喷射。为了能够可靠地对在清洗槽7内重叠的多个餐具tw1进行清洗,或者对清洗槽7的内壁面或餐具篮70进行清洗,喷嘴61的喷射方向可以变化成各式各样的方向。
[0046]
当泵62进行正转动作时,将在清洗槽7的储水部71储存的清洗水供给于喷嘴61而向清洗槽7内喷射。由于所喷射的清洗水储存于储水部71,因此,通过泵62,能够反复地向喷嘴61供给。另外,在泵62进行反转动作时,能够将清洗槽7内的清洗水经由剩菜过滤器67以及排水管p2而向餐具清洗机1的外部排出。
[0047]
加热器、送风风扇、温度传感器以及水位传感器
[0048]
餐具清洗机1还具备:加热器63、送风风扇68、温度传感器31以及水位传感器34。送风风扇68是本发明的“送风机构”的一例。温度传感器31是本发明的“温度监测机构”的一例。
[0049]
另外,图1以及图2中双点划线所示的室温传感器32不是实施例1的餐具清洗机1所具备的,而是实施例2的餐具清洗机所具备,故而在本实施例中不予以说明。
[0050]
如图1所示,加热器63、送风风扇68、温度传感器31以及水位传感器34也组装于清洗槽7,在清洗槽7被拉出推入之时与清洗槽7一起移动。
[0051]
加热器63配置在储水部71的底部。加热器63对在清洗槽7的储水部71储存的清洗水、或者清洗槽7内的空气进行加热。
[0052]
例如,在储水部71储存有清洗水的状态下,加热器63被通电控制而持续地发热,或者停止发热,由此,清洗水被加热到规定的温度范围,并通过喷嘴61以及泵62而向清洗槽7内喷射。
[0053]
另外,在储水部71没有储存有清洗水的状态下,加热器63被通电控制而持续地发热,或者停止发热,由此,清洗槽7内的空气被加热到规定的温度范围。
[0054]
通过送风风扇68进行旋转动作,从餐具清洗机1的外部朝向清洗槽7内供给空气,并使该空气从清洗槽7内经由排气通路79而排出到机外。
[0055]
例如,在清洗槽7的储水部71中储存的清洗水通过喷嘴61以及泵62而向清洗槽7内喷射之时,通过送风风扇68进行旋转动作,清洗槽7内的含有湿气或蒸气的空气就会从排气通路79的排气口79a被排出到机外。此时,由加热器63加热的清洗水的温度越高,向机外排出的空气所含有的蒸气就越容易变多。
[0056]
另外,当在清洗槽7内结束清洗以及冲洗的餐具tw1进行烘干之时,送风风扇68进行旋转动作,且加热器63被通电控制,由此,向清洗槽7内供给的空气被加热到规定的温度
范围,一边烘干餐具tw1一边在清洗槽7内流通。此后,在清洗槽7内流通而含有湿气或蒸气的空气从排气通路79的排气口79a被排出到机外。
[0057]
温度传感器31被设置在相对于储水部71的底部中的加热器63而处于下方的位置。温度传感器31对清洗槽7内的温度进行监测。更加详细而言,温度传感器31在加热器63的附近,对在清洗槽7的储水部71储存的清洗水、或者清洗槽7内的空气的温度进行监测。
[0058]
另外,大多情况下,餐具清洗机1在将清洗水从清洗槽7的储水部71排出而结束运转之后,直到开始下一次运转为止,间隔开几个小时以上。由此,在运转开始前的餐具清洗机1中,清洗槽7以及加热器63的温度极有可能是与室温相同的程度。另外,在运转开始前的餐具清洗机1中,在实施将清洗槽7从收容位置拉出而将餐具tw1收容在清洗槽7内的作业的期间,清洗槽7内的空气很容易被换气。因此,在本实施例中,如在后面详细说明的那样,在开始清洗工序之前,将温度传感器31所监测到的清洗槽7内的空气的温度推定为室温。
[0059]
水位传感器34是设置在水位监测槽34a内的浮动式传感器,其中,该水位监测槽34a配置在清洗槽7的储水部71的旁边。水位监测槽34a经由连通管p3而与清洗槽7的储水部71连接。水位传感器34用于监测清洗槽7内的清洗水的水位。
[0060]
控制部、操作部以及显示部
[0061]
图1以及如图2所示,餐具清洗机1还具备:控制部c1、操作部40以及显示部47。
[0062]
如图1所示,控制部c1配置在:清洗槽7的前部的比把手7g更靠向下方的位置。操作部40以及显示部47配置在清洗槽7的前部的上端。
[0063]
控制部c1是由未图示的cpu、存储器、接口电路等构成的电子电路单元。如图2所示,控制部c1包括存储部c12。存储部c12是构成控制部c1的存储器,并由rom以及ram等存储元件构成。
[0064]
存储部c12存储有:为了使餐具清洗机1进行动作而由控制部c1执行的各种程序、例如图3~图5所示的清洗运转程序等。另外,存储部c12能够随时存储:餐具清洗机1的设定信息等各种信息、用于执行各种程序的初始设定信息等。
[0065]
如图2所示,控制部c1从温度传感器31以及水位传感器34接收监测信号。另外,控制部c1从下述未图示的传感器类接收监测信号,未图示的传感器例如包括:用于监测清洗槽7是否处于收容位置的位置传感器、用于监测清洗槽7是否被锁定在收容位置的锁定传感器。
[0066]
而且,控制部c1借助驱动电路60而输出控制信号,由此,来控制喷嘴61、泵62、供水电磁阀69、加热器63以及送风风扇68的动作,从而执行清洗运转。在本实施例中,清洗运转包含:清洗工序、无加热冲洗工序、加热冲洗工序以及烘干工序。无加热冲洗工序以及加热冲洗工序是本发明的“冲洗工序”的一例而已。
[0067]
控制部c1在清洗工序中,利用使加热器63进行动作而加热到规定的温度范围的清洗水,来对收容在清洗槽7的餐具tw1进行清洗。
[0068]
控制部c1在无加热冲洗工序中,在停止了加热器63的状态下,利用清洗水来对清洗工序后的餐具tw1进行冲洗。
[0069]
控制部c1在加热冲洗工序中,利用使加热器63进行动作而加热到规定的温度范围的清洗水,来对无加热冲洗工序后的餐具tw1进行冲洗。
[0070]
控制部c1在烘干工序中,利用使送风风扇68以及加热器63进行动作而加热到规定
的温度范围的暖风,来烘干冲洗工序后的餐具tw1。
[0071]
控制部c1在送风风扇68的连续旋转中使驱动电压等发生变化来变更转速,或者在送风风扇68的间歇性的旋转中,变更旋转与停止之间的时间配比,由此能够对其风量进行变更。
[0072]
在本实施例中,使得烘干工序中的送风风扇68的风量为100%。如在后面详细说明的那样,在清洗工序以及冲洗工序中有时需要使送风风扇68进行旋转动作的情况下,控制部c1根据情况,而设定:比100%低的规定的风量w1。
[0073]
操作部40具有:电源按键、用户进行输入操作用的未图示的多个按键等。如图1所示,在清洗槽7处于收容位置的状态下,由于操作部40被顶板ct1所覆盖,因此,用户无法进行操作。另一方面,虽然省略了图示,但是,操作部40在清洗槽7被拉出的状态下呈现露出,因此,用户能够进行操作。控制部c1获取:用户对操作部40进行的各种操作输入的信息。
[0074]
显示部47具有:灯、能够显示用于将各种信息传递给用户的数字或文字等的显示元件等。显示部47也在清洗槽7被拉出的状态下呈现露出,因此,用户能够视觉确认。控制部c1将与清洗运转的设定等有关的信息、清洗运转的进展情况等各种信息传递给显示部47,并使之显示。
[0075]
清洗运转中进行的多个工序以及结露抑制动作
[0076]
用户在使餐具清洗机1执行清洗运转的情况下,首先将清洗槽7从壳体9拉出,进行将清洗对象的餐具tw1载放在餐具篮70上的作业,而且按动操作部40的电源按键,来接通餐具清洗机1的电源。
[0077]
在该状态下,清洗槽7的储水部71未储存有清洗水,通过清洗槽7的拉出或餐具tw1的载放而使得清洗槽7内的空气被换气。由此,温度传感器31能够监测:所拉出的清洗槽7内的已被换气的空气的温度。
[0078]
当接通餐具清洗机1的电源时,控制部c1执行:图3~图5所示的清洗运转程序的步骤s101~s144。
[0079]
具体而言,控制部c1在图3所示的步骤s101中,从餐具清洗机1的电源被接通之时,就能够获取温度传感器31的监测结果。
[0080]
接着,控制部c1转移到步骤s102,判断:是否由操作部40接受运转开始操作将清洗槽7返回到了收容位置。
[0081]
在用户将清洗对象的餐具tw1载放在餐具篮70的作业、以及、针对操作部40进行的各种设定输入完成之后,将清洗槽7返回到收容位置以便开始清洗运转时,在步骤s102为“yes”,转移到步骤s103。
[0082]
另一方面,如果用户将清洗对象的餐具tw1载放在餐具篮70的作业、以及、针对操作部40进行的各种的设定输入还在继续中,而清洗槽7没有返回到收容位置,则在步骤s102为“no”,反复进行步骤s101、s102。
[0083]
即,控制部c1在步骤s101、s102中,开始清洗工序之前,持续地获取温度传感器31的监测结果。步骤s101、s102是本发明的“开始前监测动作”的一例。执行步骤s101、s102之时的温度传感器31是本发明的“室温监测机构”的一例。
[0084]
当从步骤s102转移到步骤s103时,控制部c1基于所获取的温度传感器31的监测结果,判断:上一次运转后的清洗槽7以及加热器63的温度降低是否不够充分。作为具体例,根
据所获取的温度传感器31的监测结果而计算出的温度降低率是否高于规定的閾值,由此来判断上一次运转后的清洗槽7以及加热器63的温度降低是否不够充分。
[0085]
在步骤s103为“no”的情况下,控制部c1判断为:上一次运转后的清洗槽7以及加热器63的温度已经充分降低,转移到步骤s104。另一方面,在步骤s103为“yes”的情况下、控制部c1判断为:上一次运转后的清洗槽7以及加热器63的温度降低不够充分,转移到步骤s105。
[0086]
当从步骤s103转移到步骤s104时,控制部c1将在步骤s101、s102中获取到的温度传感器31的监测结果推定为室温。
[0087]
如图6所示,在存储部c12存储有:关于室温与规定的开始温度t1之间的关系的信息。控制部c1参照存储于存储部c12的信息,根据温度传感器31所监测到的室温,来设定规定的开始温度t1。
[0088]
例如,如果温度传感器31所监测到的室温为15℃,则将规定的开始温度t1设定为38℃,如果室温为35℃,则将开始温度t1设定为45℃。即,从图6所示的图表中的右肩上升曲线明显可知,温度传感器31所监测到的室温越低,控制部c1就会越发降低开始温度t1。
[0089]
而且,控制部c1将所设定的规定的开始温度t1作为此次运转时的值而存储于存储部c12。此后,控制部c1转移到图4所示的步骤s111。
[0090]
另一方面,当从步骤s103转移到步骤s105时,控制部c1判断为:无法将在步骤s101、s102所获取的温度传感器31的监测结果推定为室温,将用于开始进行结露抑制动作的规定的开始温度t1设定为:已存储于存储部c12的上一次运转时的值,并作为此次运转时的值而存储于存储部c12。此后,控制部c1转移到图4所示的步骤s111。
[0091]
当从图3所示的步骤s104或者步骤s105转移到图4所示的步骤s111时,控制部c1控制供水电磁阀69,并向清洗槽7供给清洁的清洗水。
[0092]
接着,控制部c1转移到步骤s112,开始清洗工序。具体而言,控制部c1一边利用加热器63对在清洗槽7的储水部71储存的清洗水进行加热,一边使泵62进行动作,将被加热的清洗水从喷嘴61向清洗槽7内喷射。此时,预先投放到清洗槽7的规定位置的洗涤剂溶解于被供给到清洗槽7的清洗水中。据此,通过清洗水所含有的洗涤剂,能够促进收容在清洗槽7的餐具tw1上的污垢的分解,污垢成分就会从餐具tw1转移到清洗水中。
[0093]
在由加热器63加热的清洗水达到上限温度之后,经过规定时间,直到在步骤s117为“yes”为止,继续进行清洗工序。此时,温度传感器31对清洗槽7内的清洗水的温度进行监测。
[0094]
在步骤s112开始进行清洗工序之后,控制部c1转移到步骤s113,判断:温度传感器31所监测到的清洗水的温度是否为规定的开始温度t1以上。
[0095]
从自来水管等供水源供给来的温度较低状态的清洗水虽然通过加热器63的加热而呈温度上升,但直至达到规定的开始温度t1为止,在步骤s113一直为“no”,反复进行步骤s113。而且,当通过加热器63的进一步加热,而清洗水的温度达到规定的开始温度t1时,在步骤s113为“yes”,转移到步骤s114。
[0096]
当转移到步骤s114时,控制部c1为了执行送风风扇68所实施的结露抑制动作,而设定规定的风量w1。
[0097]
如图7所示,在存储部c12存储有:清洗水的温度和规定的开始温度t1之间的差值、
与规定的风量w1之间的关系所相关的信息。控制部c1参照存储于存储部c12的信息,根据清洗水的温度和规定的开始温度t1之间的差值,来设定规定的风量w1。
[0098]
具体而言,使烘干工序中的送风风扇68的风量为100%,如果清洗水的温度与规定的开始温度t1之间的差值为0℃以上且小于6℃,则将规定的风量w1设定为30%,如果差值为6℃以上且小于11℃,则将风量w1设定为50%,如果差值为11℃以上,则将风量w1设定为70%。即,温度传感器31所监测到的清洗水的温度越高,控制部c1就会越发增加结露抑制动作中的风量w1。
[0099]
接着,控制部c1转移到图4所示的步骤s115,作为结露抑制动作,以规定的风量w1而使送风风扇68进行运转。据此,送风风扇68将空气从餐具清洗机1的外部向清洗槽7内供给,并将清洗槽7内的含有湿气或蒸气在内的空气从排气通路79的排气口79a排出到机外。
[0100]
接着,控制部c1转移到步骤s116,根据清洗水的温度与规定的开始温度t1之间的差值的增加,对规定的风量w1进行再次设定。
[0101]
接着,控制部c1转移到步骤s117,判断:由加热器63加热的清洗水达到上限温度之后是否经过了规定时间。在本实施例中,作为一例,清洗工序中的清洗水的上限温度为60℃,达到上限温度之后的规定时间为10分钟。
[0102]
在步骤s117为“no”的情况下,反复进行步骤s115~s117。此时,控制部c1在步骤s116,对规定的风量w1进行再次设定时,在下一步骤s115,以被再次设定的规定的风量w1来使送风风扇68进行运转。
[0103]
另一方面,在步骤s117为“yes”的情况下,完成清洗工序,转移到步骤s121。
[0104]
例如,温度传感器31所监测到的室温为15℃,在步骤s104中规定的开始温度t1被设定为38℃的情况下,在步骤s114,清洗水的温度(38℃)与规定的开始温度t1(38℃)之间的差值为0℃,因此,规定的风量w1被设定为30%。此后,反复进行步骤s115~s117,当清洗水的温度与规定的开始温度t1之间的差值为44℃-38℃=6℃时,规定的风量w1被再次设定为50%,当差值为49℃-38℃=11℃时,规定的风量w1被再次设定为70%。即便清洗水达到上限温度60℃,规定的风量w1也被维持在70%。
[0105]
当从步骤s117转移到步骤s121时,控制部c1多次执行:通过泵62的反转将含有洗涤剂以及污垢成分在内的清洗水经由排水管p2向餐具清洗机1的外部排出的动作、控制供水电磁阀69而向清洗槽7供给清洁的清洗水的动作、以及无加热冲洗工序。
[0106]
在无加热冲洗工序中,将没有被加热器63加热的清洗水从喷嘴61向清洗槽7内喷射,并将含有洗涤剂以及污垢成分在内的清洗水从餐具tw1上去除。此时,温度传感器31对清洗槽7内的清洗水或者空气的温度进行监测。
[0107]
控制部c1在排水~供水~无加热冲洗工序的执行中,转移到步骤s122,判断:温度传感器31所监测到的温度是否小于规定的开始温度t1。
[0108]
从自来水管等供水源供给来的温度较低状态的清洗水虽然在无加热冲洗工序的执行中能够降低清洗槽7内的温度,但是,直至降低到规定的开始温度t1为止,在步骤s122为“no”,反复进行步骤s122。而且,当清洗槽7内的温度降低到规定的开始温度t1时,在步骤s122为“yes”,转移到步骤s123。
[0109]
当转移到步骤s123时,控制部c1使送风风扇68停止下来从而结束结露抑制动作。这样,控制部c1在清洗工序中,当清洗槽7内的温度达到规定的开始温度t1时则执行结露抑
制动作,在无加热冲洗工序的中途,直至清洗槽7内的温度降低到规定的开始温度t1为止,持续进行结露抑制动作,将清洗槽7内的蒸气强制性地向机外排出,由此,能够抑制餐具清洗机1的周边亦即顶板ct1等上的结露。
[0110]
接着,控制部c1转移到步骤s124,判断:无加热冲洗工序的多次执行是否完成。在步骤s124为“no”的情况下,反复进行步骤s124。另一方面,在步骤s124为“yes”的情况下,转移到图5所示的步骤s125。
[0111]
当转移到步骤s125时,控制部c1通过泵62的反转而将使用于冲洗的清洗水向餐具清洗机1的外部排出。
[0112]
接着,控制部c1转移到步骤s126,控制供水电磁阀69而向清洗槽7供给清洁的清洗水。
[0113]
接着,控制部c1转移到步骤s131,开始加热冲洗工序。在加热冲洗工序中,将由加热器63加热的清洗水从喷嘴61向清洗槽7内喷射,从而将含有洗涤剂以及污垢成分在内的清洗水从餐具tw1上去除。
[0114]
在由加热器63加热的清洗水达到上限温度之后,经过规定时间,直至在步骤s136为“yes”为止,持续进行加热冲洗工序。此时,温度传感器31对清洗槽7内的清洗水的温度进行监测。
[0115]
在步骤s131开始进行加热冲洗工序之后,控制部c1转移到步骤s132,判断:温度传感器31所监测到的清洗水的温度是否为规定的开始温度t1以上。
[0116]
从自来水管等供水源供给来的温度较低状态的清洗水虽然通过加热器63的加热而呈温度上升,但直至达到规定的开始温度t1为止,在步骤s132一直为“no”,反复进行步骤s132。而且,当通过加热器63的进一步加热而清洗水的温度达到规定的开始温度t1时,在步骤s132为“yes”,转移到步骤s133。
[0117]
当转移到步骤s133时,控制部c1为了执行送风风扇68所实施的结露抑制动作,而设定规定的风量w1。
[0118]
控制部c1参照图7所示的存储部c12所存储的信息,根据清洗水的温度与规定的开始温度t1之间的差值,来设定规定的风量w1。由于该设定与步骤s114是同样的,故省略说明。
[0119]
接着,控制部c1转移到图5所示的步骤s134,作为结露抑制动作,以规定的风量w1而使送风风扇68进行运转。据此,送风风扇68将空气从餐具清洗机1的外部向清洗槽7内供给,并将清洗槽7内的含有湿气或蒸气在内的空气从排气通路79的排气口79a排出到机外。
[0120]
接着,控制部c1转移到步骤s135,根据清洗水的温度与规定的开始温度t1之间的差值的增加,对规定的风量w1进行再次设定。
[0121]
接着,控制部c1转移到步骤s136,判断:由加热器63加热的清洗水达到上限温度之后是否经过了规定时间。在本实施例中,作为一例,加热冲洗工序中的清洗水的上限温度为70℃,达到限温度之后的规定时间为2分钟。
[0122]
在步骤s136为“no”的情况下,反复进行步骤s134~s136。此时,控制部c1在步骤s135,对规定的风量w1进行再次设定时,在下一步骤s134,以被再次设定的规定的风量w1来使送风风扇68进行运转。即,即便在加热冲洗工序,也与清洗工序同样地,温度传感器31所监测到的清洗水的温度越高,控制部c1就会越发增加结露抑制动作中的风量w1。
[0123]
另一方面,在步骤s136为“yes”的情况下,加热冲洗工序完成而转移到步骤s137。这样,控制部c1在加热冲洗工序中,当清洗槽7内的温度达到规定的开始温度t1时,执行结露抑制动作,直至加热冲洗工序结束为止,持续进行结露抑制动作,将清洗槽7内的蒸气强制性地排出到机外,由此,能够抑制餐具清洗机1的周边亦即顶板ct1等上的结露。
[0124]
当转移到步骤s137时,控制部c1通过泵62的反转而将使用于加热冲洗的清洗水向餐具清洗机1的外部排出。
[0125]
接着,控制部c1转移到步骤s141,开始烘干工序。而且,控制部c1转移到步骤s142,以100%的风量而使送风风扇68进行运转。在烘干工序中,利用使加热器63进行动作而被加热到规定的温度范围的暖风,来烘干冲洗工序后的餐具tw1。此时,温度传感器31能够监测:清洗槽7内的暖风的温度。
[0126]
接着,控制部c1转移到步骤s143,判断是否经过了规定时间。在本实施例中,作为一例,烘干工序中的暖风的温度范围为50℃~60℃,规定时间为60分钟。
[0127]
在步骤s143为“no”的情况下,反复进行步骤s143。另一方面,在步骤s143为“yes”的情况下,烘干工序完成而转移到步骤s144。
[0128]
当转移到步骤s144时,控制部c1执行清洗运转的结束处理。具体而言,使加热器63停止,直至清洗槽7内的空气的温度降低到规定的结束温度为止,利用送风风扇68而将外部的空气向清洗槽7内供给,此后,使送风风扇68停止下来。而且,在将清洗运转的结束向用户进行通知之后,结束该程序。
[0129]
在实施例1的餐具清洗机1中,当接通餐具清洗机1的电源时,控制部c1执行:图3~图5所示的清洗运转程序的步骤s101~s144。而且,在用户将清洗对象的餐具tw1载放在餐具篮70的作业、以及、针对操作部40进行的各种设定输入完成之后,将清洗槽7返回到收容位置以便开始清洗运转时,执行:包含清洗工序、无加热冲洗工序、加热冲洗工序以及烘干工序在内的清洗运转。
[0130]
在此,控制部c1执行图3所示的步骤s101~s104,温度传感器31所监测到的室温越低,就会越发降低规定的开始温度t1。由此,例如,相比于室温较高的夏季而言,控制部c1更加降低室温较低的冬季这一方的开始温度t1。另外,例如,即便是在因为各式各样的外因而导致室温变化的开放的设置环境下,那种时不时的室温越低,控制部c1就会越发降低开始温度t1。其结果,控制部c1在与室温相对应的适当时机执行图4所示的步骤s115的结露抑制动作、以及图5所示的步骤s134的结露抑制动作,从而能够将清洗槽7内的蒸气强制性地排出到机外。
[0131]
所以,根据实施例1的餐具清洗机1,无论季节或设置环境如何都能够稳定地抑制餐具清洗机1的周边上的结露。
[0132]
另外,在该餐具清洗机1中,控制部c1通过执行图4所示的步骤s114、s116,而在清洗工序中温度传感器31所监测到的清洗水的温度越高,就会越发增加图4所示的步骤s115的结露抑制动作中的风量w1。另外,控制部c1通过执行图5所示的步骤s133、s135,而在加热冲洗工序中温度传感器31所监测到的清洗水的温度越高,就会越发增加图5所示的步骤s134的结露抑制动作中的风量w1。由此,在该餐具清洗机1中,清洗槽7内的清洗水的温度变高而产生的蒸气是结露原因所在,当变成了清洗槽7内容易产生蒸气的环境的那种程度时,就会增加送风风扇68的风量w1。其结果,根据该餐具清洗机1,在控制部c1执行结露抑制动
作的期间,能够极其可靠地将清洗槽7内的蒸气排出到机外,因此,能够进一步抑制餐具清洗机1的周边上的结露。
[0133]
此外,在该餐具清洗机1中,控制部c1在图4的步骤s112,开始进行清洗工序之前,在图3的步骤s101、s102执行:利用温度传感器31而对清洗槽7内的空气温度进行监测的开始前监测动作,并将由开始前监测动作所获取到的空气的温度推定为室温。而且,执行开始前监测动作时的温度传感器31为室温监测机构。根据该构成,由于已有的温度传感器31兼用作室温监测机构,因此,与重新设置室温监测机构的情况相比,能够实现制造成本的廉价化。
[0134]
实施例2的餐具清洗机除了实施例1的餐具清洗机1的构成之外,还具备图1以及图2中双点划线所示的室温传感器32。室温传感器32配置在清洗槽7的前部位置的把手7g与排气口79a之间。室温传感器32监测室温。室温传感器32是本发明的“室温监测机构”的一例而已。伴随于此,实施例1所涉及的温度传感器31变更成:在实施例2中不兼用作室温监测机构。
[0135]
而且,在实施例2的餐具清洗机中,替换实施例1的餐具清洗机1所执行的清洗程序的图3所示的步骤s101~s105,变更成:执行图8所示的步骤s201~s203。实施例2的其他构成与实施例1同样。
[0136]
在实施例2中,当接通餐具清洗机的电源时,控制部c1在图8所示的步骤s201,判断:是否由操作部40接受运转开始操作将清洗槽7是否返回到了收容位置。
[0137]
在用户将清洗对象的餐具tw1载放在餐具篮70的作业、以及、针对操作部40进行的各种设定输入完成之后,为了开始清洗运转,将清洗槽7返回到收容位置时,在步骤s201为“yes”,转移到步骤s202。
[0138]
另一方面,如果用户将清洗对象的餐具tw1载放在餐具篮70的作业、以及、针对操作部40进行的各种的设定输入还在继续中,而清洗槽7没有返回到收容位置,则在步骤s201为“no”,反复进行步骤s201。
[0139]
当从步骤s201转移到步骤s202时,控制部c1获取室温传感器32所监测到的室温。
[0140]
接着,控制部c1转移到步骤s203,参照图6所示的存储部c12所存储的信息,根据室温传感器32所监测到的室温,来设定规定的开始温度t1。
[0141]
例如,如果室温传感器32所监测到的室温为15℃,则将规定的开始温度t1设定为38℃,如果室温为35℃,则将开始温度t1设定为45℃。即,室温传感器32所监测到的室温越低,控制部c1就会越发降低开始温度t1。
[0142]
而且,控制部c1将所设定的规定的开始温度t1存储于存储部c12之后,转移到图4所示的步骤s111。步骤s111以后的处理与实施例1同样,故而省略说明。
[0143]
根据如此构成的实施例2的餐具清洗机,与实施例1的餐具清洗机1同样地,无论季节或设置环境如何都能够稳定地抑制餐具清洗机1的周边上的结露。
[0144]
如上所述,虽然本发明依据实施例1、2进行了说明,但是,本发明并非受到上述实施例1、2所限制,自不待言在不脱离其宗旨的范围内可以进行适当变更来适用。
[0145]
关于实施例1所涉及的温度传感器31监测室温的时机,只要是在开始清洗工序之前,清洗槽7的储水部71未储存有清洗水,加热器63处于停止的状态下,可以是任何时候,例如,也可以是在清洗槽7返回到收容位置之前。
[0146]
关于实施例2所涉及的室温传感器32监测室温的时机,只要是在执行结露抑制动作之前,可以是任何时候,例如,也可以是在开始清洗工序或者加热冲洗工序之前的供水时。
[0147]
虽然实施例2所涉及的室温传感器32设置在清洗槽7的前部,但是,本发明并非限定于该构成。例如,室温监测机构只要是能够监测室温,可以设置在任意的位置,也可以设置成远离清洗槽以及壳体。
[0148]
虽然实施例1、2所涉及的排气口79a是在把手7g的下方呈开口,但是,本发明并非限定于该构成。例如,用于将清洗槽内的空气向机外排出的排气口既可以在清洗槽的侧面呈开口,也可以在把手7g的侧边呈开口。另外,虽然在实施例1、2所涉及的排气通路79没有设置摆动式闸门等,但是,本发明并非限定于该构成。例如,也可以在将清洗槽内的空气向机外排出的排气通路设置摆动式闸门等开闭机构。
[0149]
根据实施例1、2,虽然在清洗运转程序的步骤s114,根据清洗水的温度与规定的开始温度t1之间的差值,来设定规定的风量w1,但是,本发明并非限定于该构成。例如,可以变更成:在步骤s114,根据清洗水的温度与室温之间的差值,来设定规定的风量w1,或者不是根据差值而是只根据清洗水的温度,来设定规定的风量w1。关于步骤s116、s133、s135也是同样的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1