一种自移动清洁设备及具有其的清洁系统的制作方法
1.本发明涉及清洁设备技术领域,尤其涉及一种自移动清洁设备及具有其的清洁系统。
背景技术:
2.自移动清洁设备是能够在没有人为引导的环境中执行所需清洁操作的机器人,常见的有扫地机器人、拖地机器人等。现有的自移动清洁设备配备有存储垃圾的集尘盒,通常集尘盒的体积较小,所容纳的垃圾的容量有限,很容易装满,在集尘盒装满垃圾之后,需用户手动进行清理,使用非常不便。因此,有必要对现有技术予以改良以克服现有技术中的所述缺陷。
技术实现要素:
3.本发明的目的在于提供一种自移动清洁设备及具有其的清洁系统,其能够实现自动排尘作业,具有使用方便的优点。
4.本发明的目的是通过以下技术方案实现:
5.在本发明公开的第一方面,提供了一种自移动清洁设备,包括:机身,其底部上设有第一吸尘口;第一清洁件,可转动设于所述第一吸尘口内,用于清扫待清洁表面;第二清洁件,可转动设于所述机身的底部上,用于湿拖待清洁表面;所述第二清洁件较所述第一清洁件处于所述机身前进方向的后方;集尘盒,设于所述机身内,所述集尘盒具有与所述第一吸尘口连通的集尘腔,在第一抽吸力作用下,用于收集由所述第一清洁件清扫的脏物;所述集尘盒上还设有与所述集尘腔连通的排尘口,在自移动清洁设备与外部设备配合时,所述排尘口适于与外部设备的第一回收箱连通,并且在第二抽吸力作用下,用于将所述集尘腔内的脏物转移至所述第一回收箱内。
6.在其中一实施方式中,所述集尘盒还包括与所述集尘腔连通的进风口;所述进风口处设有第一阀门单元,所述排尘口处设有第二阀门单元;所述第一阀门单元具有关闭所述进风口的关闭状态和打开所述进风口的敞开状态;所述第二阀门单元具有关闭所述排尘口的关闭状态和打开所述排尘口的敞开状态;所述集尘盒与所述外部设备对接时,所述第二抽吸力驱使所述第一阀门单元和第二阀门单元均开启,以使所述集尘腔与所述第一回收箱连通。
7.在其中一实施方式中,所述进风口和排尘口较所述第二清洁件,位于所述机身前进方向的后方。
8.在其中一实施方式中,所述自移动清洁设备还包括:第一盒体,设于所述机身内;所述第一盒体具有第一储液腔,及与所述第一储液腔连通的第一进液口和第一出液口;所述第一出液口与所述第二清洁件所在的安装腔连通;在自移动清洁设备与外部设备配合时,所述第一进液口适于与所述外部设备的补液箱的补液腔连通。
9.在其中一实施方式中,所述自移动清洁设备还包括:第二盒体,具有第二储液腔,
及与所述第二储液腔连通的第二进液口和第二出液口;所述第二进液口与所述第二清洁件所在的安装腔连通;所述第二盒体用于在第三抽吸力作用下经所述第二进液口回收所述安装腔内的溶液;在自移动清洁设备与外部设备配合时,所述第二出液口适于与外部设备的第二回收箱的回收腔连通。
10.在其中一实施方式中,所述第一盒体和所述第二盒体分布于所述集尘盒的相对两侧壁外,并且所述集尘盒、所述第一盒体和所述第二盒体中的任意一个可拆卸地设在所述机身内。
11.在其中一实施方式中,所述自移动清洁设备还包括可拆卸地设在所述机身内的安装座;所述安装座的顶部上设有供所述第一盒体、所述集尘盒及所述第二盒体分别沿竖向可拆卸地安装的第一凹槽、第二凹槽及第三凹槽。
12.在其中一实施方式中,所述安装座的底部上设有向上凹陷的凹陷区域;所述第二清洁件所在的安装腔设于所述机身的底部上,所述安装腔对应于所述凹陷区域,以供所述第二清洁件安装。
13.在其中一实施方式中,所述机身的侧壁上设有与所述第一进液口对应的补液接口,在所述自移动清洁设备通过所述补液接口与外部设备配合时,迫使所述第一进液口适于与所述外部设备的补液箱的补液腔连通;和/或
14.所述机身的侧壁上设有与所述第二出液口对应的排污接口,当所述自移动清洁设备通过所述排污接口与所述外部设备配合时,迫使所述第二出液口适于与所述外部设备的所述第二回收箱的回收腔连通;和/或
15.所述进风口和排尘口均设在所述集尘盒的底部上,所述机身底部上设有与所述进风口对应的进风接口、与所述排尘口对应的排尘接口,在所述自移动清洁设备的排尘接口与所述外部设备配合时,迫使所述集尘腔与所述第一回收箱连通。
16.在其中一实施方式中,所述补液接口上设有补液截流机构,所述补液截流机构具有截断所述补液接口的截断状态和打开所述补液接口的开启状态;在开启状态下,所述补液接口与所述第一进液口连通;和/或
17.所述排污接口上设有排污截流机构,所述排污截流机构具有截断所述排污接口的截断状态和打开所述排污接口的开启状态;在开启状态下,所述排污接口与所述第二出液口连通。
18.在其中一实施方式中,所述机身的侧壁上设有线激光模组,所述线激光模组用于检测所述机身的外侧壁与外部的清扫边界之间的距离;和/或
19.所述机身的顶部上设有顶部开口;所述自移动清洁设备还包括设在所述机身内的支撑结构,及设在所述支撑结构的顶部上的测距机构;所述测距机构受所述支撑结构的驱动可在伸出所述顶部开口的第一状态和回缩在机身内的第二状态之间切换;所述测距机构较所述第二清洁件处于所述机身前进方向的后方;
20.所述测距机构接收外界障碍物的碰撞力的驱动,以控制所述支撑结构做下降运动。
21.在其中一实施方式中,所述机身还设有感测单元、与所述感测单元连接的控制器,所述感测单元用于检测外界障碍物的高度,所述支撑结构受所述控制器的控制而做升降运动。
22.在其中一实施方式中,所述安装腔设在所述机身的底部的外壁面上,所述安装腔为底部及侧壁呈敞开口的安装凹槽;所述第二清洁件从所述侧壁敞开口可拆卸地设在所述安装腔内。
23.在其中一实施方式中,所述自移动清洁设备还包括一个侧抽端盖单元,所述第二清洁件的一端可转动地设在所述侧抽端盖单元上,所述侧抽端盖单元与所述机身可拆卸地固定连接,所述第二清洁件的另一端与设于所述机身内的驱动器传动连接,且受所述驱动器的驱动而转动;其中,所述第二清洁件沿其转动轴线方向可拆卸地设于所述安装腔内。
24.在本发明公开的第二方面,提供了一种清洁系统,包括:如前所述的自移动清洁设备;清洁基站,设有第一回收箱;在所述清洁基站与所述自移动清洁设备配合时,所述排尘口适于与清洁基站的第一回收箱连通。
25.本发明具有如下有益效果:
26.本发明提供的,其一种自移动清洁设备及具有其的清洁系统,当其与外部设备配合后,外部设备上产生的第二抽吸力使得集尘盒内形成抽吸气流,用于将集尘腔内的脏物转移至第一回收箱内。由此,可实现集尘盒的自动排尘作业,避免用户手动倒灰,具有使用方便的优点。
附图说明
27.图1是本发明提出的自移动清洁设备的立体图。
28.图2是图1中的装饰盖处于打开状态时的示意图。
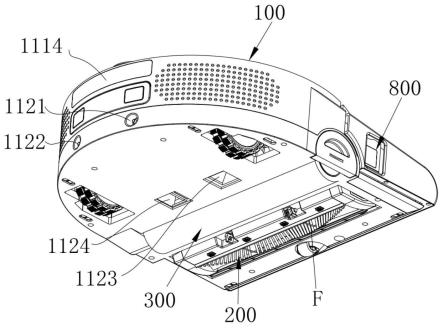
29.图3是本发明提出的自移动清洁设备在仰视方向上的示意图。
30.图4是图3中第二清洁件与安装腔之间的分解示意图。
31.图5是图1的剖面结构示意图。
32.图6是图5中a区域的放大结构示意图。
33.图7是图1中机身和测距机构之间的分解示意图。
34.图8是本发明的循环系统的示意图。
35.图9是图8中第一盒体、第二盒体、补液截流机构以及排污截流机构之间的连接关系示意图。
36.图10是图9在仰视方向上的示意图。
37.图11是本发明中撞板组件的结构示意图。
38.图12是图11的分解示意图。
39.图13是本发明中第二清洁件与驱动器之间的连接关系示意图。
40.图14是本发明中第二清洁件的剖面结构示意图。
41.图15是图14中b区域的放大结构示意图。
42.图16是图15中侧抽端盖的结构示意图。
43.图17是图13中侧壁敞开口与第一连接部之间的位置关系示意图。
44.图18是图17中c区域的放大结构示意图。
45.图19是本发明中第二清洁件和分配座之间的位置关系示意图。
46.图20是图19的剖面结构示意图。
47.图21是图19中分配座的分解示意图。
48.图22是图19中分配座在仰视方向上的示意图。
49.图23是图19中分配座内部流道的分布示意图。
50.图24是图23中d区域的放大结构示意图。
51.图25是本发明中第二清洁件和介质回收机构之间的位置关系示意图。
52.图26是图25的分解示意图。
53.图27是图25中刮板座在仰视方向上的示意图。
54.图28是图1中第一清洁件和集尘盒之间的剖面示意图。
55.图29是本发明中安装座、集尘盒、第一盒体和第二盒体之间的位置关系示意图。
56.图30是图29的分解示意图。
57.图31是本发明中集尘盒的立体图。
58.图32是本发明中集尘盒的上盖处于打开状态的示意图。
59.图33是本发明中集尘盒的提手提起时的示意图。
60.图34是本发明中过滤单元的分解示意图。
61.图35是本发明中集尘盒的剖示意图。
62.图36是本发明中第一盒体的示意图。
63.图37是图36的分解示意图。
64.图38是本发明中第二盒体的示意图。
65.图39是图38的分解示意图。
66.图40是本发明中第二盒体的剖面结构示意图。
67.图41是本发明中安装座在俯视方向上的结构示意图。
68.图42是本发明中安装座在仰视方向上的结构示意图。
69.图43是本发明中补液截流机构的剖面结构示意图。
70.图44是本发明中支撑结构与机身之间的位置关系示意图。
71.图45是本发明中测距机构和感测单元之间的位置关系示意图。
72.图46是本发明中测距机构和支撑结构之间的分解示意图
73.图47是本发明中测距机构和支撑结构在仰视方向上的示意图。
具体实施方式
74.为使本发明的上述目的、特征和优点能够更为明显易懂,下面结合附图,对本发明的具体实施方式做详细的说明。需要理解的是,下述的“上”、“下”、“左”、“右”、“纵向”、“横向”、“内”、“外”、“竖直”、“水平”、“顶”、“底”等指示方位或位置关系的词语仅基于附图所示的方位或位置关系,仅为了便于描述本发明和简化描述,而不是指示或暗示所指的装置/元件必须具有特定的方位或以特定的方位构造和操作,因此不能理解为对本发明的限制。
75.另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
76.请参阅图1至图47所示,本发明提供了一种自移动清洁设备,包括:机身100,其底部上设有第一吸尘口f和安装腔z;驱动轮组,设于机身100的底部,用于驱使机身100前进或是后退;万向轮,可转动设于机身100的底部,用于辅助机身100前进或是后退;第一清洁件
200,可转动设于第一吸尘口f内,用于清扫待清洁表面;第二清洁件300,可转动设于机身100的底部上,用于湿拖待清洁表面,第二清洁件300较第一清洁件200处于机身100前进方向的后方;集尘盒400,设于机身100内,集尘盒400具有与第一吸尘口f连通的集尘腔,在第一抽吸力作用下,用于收集由第一清洁件200清扫的脏物。其中,集尘盒400较第一清洁件200处于机身100前进方向的后方,驱动轮组较第二清洁件300处于机身100前进方向的后方,万向轮较第一清洁件200处于机身100前进方向的前方,第一清洁件200和第二清洁件300呈清洁辊状,第一清洁件200和第二清洁件300的外圆周面为用于清洁待清洁表面的清洁面,第一清洁件200的清洁面与待清洁表面接触而实现清尘目的,第二清洁件300的清洁面与待清洁表面接触而实现湿拖目的。
77.上述自移动清洁设备为能够在没有人为引导的环境中执行所需清洁操作的机器人,在本发明中,上述自移动清洁设备为同时具备扫地和拖地功能的洗地机器人,或是单独具备拖地功能的洗地机器人,单独具备拖地功能是指机身底部只设有旋转的拖布,通过拖布的旋转实现地面的清洁,上述洗地机器人以下简称为洗地机。第一清洁件200用于清扫待清洁表面,第一清洁件200在转动过程中能够使得粘附于待清洁表面上的脏物松脱,并使得待清洁表面处的灰尘扬起,以利于吸尘。洗地机在工作时,其机身100内产生第一抽吸力,在第一抽吸力的作用下待清洁表面上的脏物通过第一吸尘口f进入集尘盒400的集尘腔。请参阅图28至35所示,集尘腔包括能够使尘气进入集尘腔的进尘口410和能够使干净气流流出集尘腔的出风口420,进尘口410位于第一清洁件200的上方,第一清洁件200与进尘口410之间设有用于供尘气流通的尘气通道v,尘气通道v连通第一清洁件200与集尘腔的进尘口410,尘气通道v呈弧形或是倾斜直线形或是任何利于尘气流动的形状。集尘腔的顶部可拆卸设有过滤单元430,集尘腔吸入的尘气在经由过滤单元430过滤后产生的干净气体通过出风口420排出集尘盒400,灰尘则收集于集尘盒400内。考虑到洗地机洗地机上的集尘盒400在装满垃圾之后,需及时进行清理,若不及时进行清理会影响洗地机的清洁效果。由此,上述集尘腔的底部设有导风单元h,用于与外部设备对接进行排尘。
78.本发明中,机身100上设有尘盒组件,所述尘盒组件包括上述集尘盒400、上述尘气通道v和导风单元h,第一清洁件200设于尘盒组件的底部前方,第二清洁件300设于尘盒组件的底部。导风单元h包括能够使外部设备产生的抽吸气流进入集尘腔的进风口460和能够使集尘腔内的脏物排出集尘盒400的排尘口470,进风口460和排尘口470均与集尘盒400的集尘腔连通。在洗地机与外部设备配合后,排尘口470和进风口460适于与外部设备的第一回收箱连通。请参阅图35所示,进风口460和排尘口470较第二清洁件300,位于机身100前进方向的后方;进风口460和排尘口470均设在集尘盒400的底部上,机身100底部上设有与进风口460对应的进风接口1123、与排尘口470对应的排尘接口1124。在洗地机的排尘接口1124、进风接口1123与外部设备配合时,迫使集尘腔与第一回收箱连通。当洗地机与外部设备配合后,外部设备上产生的第二抽吸力使得集尘盒400内形成抽吸气流,用于将集尘腔内的脏物转移至第一回收箱内。由此,通过集尘盒400的导风单元h可实现集尘盒400的自动排灰作业,避免用户手动倒灰,具有使用方便的优点。
79.为了避免集尘腔内的脏物在吸尘状态下通过进风口460和排尘口470散落至外部环境中。进风口460处设有第一阀门单元,排尘口470处设有第二阀门单元;第一阀门单元具有关闭进风口460的关闭状态和打开进风口460的敞开状态;第二阀门单元具有关闭排尘口
470的关闭状态和打开排尘口470的敞开状态。当集尘盒400与外部设备对接时,第一阀门单元和第二阀门单元分别响应于抽吸气流的作用而使得进风口460和排尘口470由关闭状态切换至敞开状态,以使集尘盒400能够与外部设备对接实现自动排尘。在上述过程中,第二抽吸力驱使第一阀门单元和第二阀门单元均开启以使集尘腔与第一回收箱连通。
80.具体地,第一阀门单元包括第一挡板461,第一挡板461位于集尘腔内,第一挡板461选用弹性材料制成,优选为橡胶材料。第一挡板461的顶部边沿固定设于集尘腔的腔壁上,第一挡板461的其他边沿为自由边沿,上述自由边沿是指:与集尘腔之间无连接关系。由此,当第一挡板461受第二抽吸力的作用时,能够朝向集尘腔的内部方向打开,集尘腔内的脏物在第一挡板461的作用下具有朝向内侧运动的趋势,能够防止在第一挡板461处于敞开状态时集尘腔内的脏物通过进风口460散落至外界环境中。第二阀门单元包括第二挡板471,第二挡板471枢接于排尘口470处,枢接轴位于第二挡板471的顶部。第二挡板471位于集尘腔外侧,第二挡板471受第二抽吸力的作用朝向集尘腔的外侧打开,这样设置的用意是:能够避免第二挡板471在打开时将集尘腔内的脏物拨出集尘腔,同样是为了避免集尘腔内的脏物散落至外界环境中。
81.为了避免机身100在与障碍物发生碰撞时,第二挡板471在外力的作用下偏离排尘口470,排尘口470处还设有吸附结构,吸附结构的作用是:当机身100未与外部设备配合时,防止第二挡板471在外力作用下偏离排尘口470而导致的脏物外漏。在一实施例中,上述吸附结构包括第一磁性件472和第二磁性件473,第一磁性件472和第二磁性件473的磁力相反。第二磁性件473设于第二挡板471的底部,第一磁性件472设于集尘腔的腔底。第二挡板471在第一磁性件472和第二磁性件473的磁性作用下紧紧抵靠于排尘口470处,能够有效防止洗地机在执行清洁任务过程中集尘腔内的脏物外漏。可以理解地,第一磁性件472和第二磁性件473产生的磁性吸附力小于第二抽吸力,由此,在进行排尘作业时,第二挡板471能够在第二抽吸力的作用下顺利打开。当然,吸附结构包括但不限于上述结构,还可以为其他具有吸附功能的结构,在此不做一一赘述。
82.进一步地,过滤单元430包括过滤件431和硬质镂空件432,硬质镂空件432和过滤件431固设以形成一整体;其中,硬质镂空件432位于过滤单元430靠近集尘腔内部的一面,硬质镂空件432用于防止集尘腔内尘气中的尖锐颗粒损伤过滤件431。上述过滤件431为海帕,上述硬质镂空件432为钢丝网。可以理解地,过滤件431和硬质镂空件432包括但不限于上述形式,还可以是其他具有相同功用的物件。
83.为了便于更换过滤单元430,集尘盒400的顶部枢接有上盖440,上盖440具有打开状态和关闭状态;当上盖440处于打开状态时,过滤件431裸露于集尘盒400的顶部;当上盖440处于关闭状态时,过滤件431被封设于集尘盒400内。上盖440靠近过滤件431侧的面体上设有限位块441,当上盖440处于关闭状态时,限位块441抵设于过滤件431的顶部,限位块441对过滤件431具有安装限位的功用,避免洗地机在遇到振动时,过滤单元430松脱,由此,过滤单元430具有连接稳定可靠,安装效果好的优点。
84.在本发明中,机身100上设有清洁件组件,清洁件组件包括上述第二清洁件300和转动设于第二清洁件300一端的侧抽端盖单元310,第二清洁件300通过侧抽端盖单元310与机身100可拆卸地连接。第二清洁件300的另一端与设于机身100内的驱动器900传动连接,且受驱动器900的驱动而转动。第二清洁件300具有转动轴线,第二清洁件300沿其转动轴线
的方向可拆卸设于安装腔z内,第二清洁件300的转动轴线与洗地机的前进方向垂直。安装腔z设在机身100的底部的外壁面上,安装腔z为底部及侧壁呈敞开口的安装凹槽,第二清洁件300从侧壁敞开口1125可拆卸地设在安装腔z内,安装腔的侧壁敞开口1125位于机身100的侧壁上。
85.进一步地,请参阅图4、图13至图18所示,侧抽端盖单元310包括侧抽端盖311,侧抽端盖311通过轴承312和转轴313转动设于第二清洁件300的一端,第二清洁件300通过侧抽端盖311与机身100可拆卸连接。第二清洁件300包括呈中空圆柱体的第二清洁件主体3001、设于第二清洁件主体3001相对两端部上的一从动端盖3002和一主动端盖3003,从动端盖3002上转动设有侧抽端盖311,主动端盖3003与驱动器900传动连接。其中,从动端盖3002内固定设有轴承312,转轴313沿第二清洁件300的转动轴线方向贯穿从动端盖3002,转轴313的一端位于从动端盖3002外侧且与侧抽端盖311固定连接,转轴313的另一端位于从动端盖3002内与轴承312连接。驱动器900连接有输出端910,第二清洁件300的主动端盖3003与输出端910抵接,在第二清洁件300安装至机身100的安装腔z内后,侧抽端盖311和输出端910形成了第二清洁件300的端部支撑。由此,具有安装方便,支撑稳定可靠的优点。
86.进一步地,侧抽端盖311与侧壁敞开口1125配合,侧壁敞开口1125处设有至少一个第一连接部1126,侧抽端盖311上设有与第一连接部1126配合的至少一个第二连接部3111,侧抽端盖310通过第一连接部1126和第二连接部3111之间的配合连接于机身100上。第一连接部1126和第二连接部3111之间的连接方式包括但不限于如下方式:在一方式中,第一连接部1126为沿第二清洁件300的圆周方向分布的旋扣,第二连接部3111为沿第二清洁件300的圆周方向分布的卡接块;在另一方式中,第一连接部1126为设于侧壁敞开口1125处的第一螺纹,第二连接部3111为设于侧抽端盖310外圆周面上的第二螺纹,其中,第一螺纹和第二螺纹相配合。
87.为了防止侧抽端盖311在洗地机工作时发生松脱,侧抽端盖311和机身100之间设有周向限位结构。周向限位结构包括沿第二清洁件300的转动轴线方向分布的凹槽3112和凸棱1127,凹槽3112和凸棱1127相卡合;其中,第二连接部3111和机身100其中一者上设有凹槽3112,其中另一者上设有凸棱1127。
88.在本发明中,机身100内设有用于向第二清洁件300提供清洁溶液并回收第二清洁件300上的污水溶液的循环系统,请参阅图8至图10所示,上述循环系统包括:第一盒体500,具有第一储液腔,及与第一储液腔连通的第一进液口510和第一出液口520,第一储液腔内存储有清洁溶液;第二盒体600,具有第二储液腔,及与第二储液腔连通的第二进液口610和第二出液口620,第二盒体600用于存储第二清洁件300上的污水溶液,并且在第三抽吸力作用下经第二进液口610回收安装腔z内的污水溶液;安装腔z,安装腔z用于供第二清洁件300可转动地安装,安装腔z设于机身100的底部,机身100可看作为用于安装第二清洁件300的安装件。其中,在洗地机与外部设备配合时,第一进液口510适于与外部设备的补液箱的补液腔连通;第一出液口520与安装腔z连通,由此,第一盒体500内的清洁溶液通过第一出液口520输送至安装腔z进而润湿第二清洁件300,以便于第二清洁件300湿拖待清洁表面。在洗地机与外部设备配合时,第二出液口620适于与外部设备的第二回收箱的回收腔连通,第二进液口610与安装腔z连通。
89.在本发明中,请参阅图3所示,机身100的侧壁上设有与第一进液口510对应的补液
接口1122、与第二出液口610对应的排污接口1121。在洗地机通过补液接口1122与外部设备配合时,迫使第一进液口510适于与外部设备的补液箱的补液腔连通;在洗地机通过排污接口1121与外部设备配合时,迫使第二出液口610适于与外部设备的第二回收箱的回收腔连通。
90.为了避免在机身100与外部设备分离时,补液接口1122和排污接口1121处发生漏液的现象。补液接口1122上设有补液截流机构160,补液截流机构160具有截断补液接口1122的截断状态和打开补液接口1122的开启状态;在开启状态下,补液接口1122与第一进液口510连通。同理,排污接口1121上设有排污截流机构170,排污截流机构170具有截断排污接口1121的截断状态和打开排污接口1121的开启状态;在开启状态下,排污接口1121与第二出液口610连通。
91.在本发明中,所述循环系统还包括介质分配机构和介质回收机构140,请参阅图3至图6所示,安装腔z的内壁面上凸设有第一凸起w,第一凸起w的端面可抵接或邻近第二清洁件300的外圆周面;安装腔z上设有第二进口和第二出口,且分布在第一凸起w的两侧。其中,第一凸起w沿第二清洁件300的转动轴线方向延伸,第一盒体500的第一出液口520与上述第二进口密封连通,第二盒体600的第二进液口610与上述第二出口密封连通。受第二清洁件300转动的驱使,安装腔内的溶液由第二进口、经第二清洁件300的外圆周面而带动到第二出口处。
92.具体地,安装腔z的内壁面上设有分布在第一凸起w两侧的第一圆弧面r1和第二圆弧面r2,第一圆弧面r1和第二圆弧面r2可抵接或邻近第二清洁件300的外圆周面上;第一圆弧面r1和第二圆弧面r2分别与第一凸起w之间的安装腔z形成向外凸出的进液区j1和出液区j2;第二进口设在进液区j1上,第二出口设在出液区j2上。
93.进一步地,安装腔z内设有位于进液区j1的介质分配机构,介质分配机构用于润湿所述第二清洁件300,请参阅图19至图24所示,介质分配机构包括:分配座150,其上设有n级流道,任意一级流道具有2n个沿分配座的长度方向均匀分布的出口,出口形成2
n-1
组对称分布在分配座150上;相邻两级流道中,前一级流道的出口作为后一级流道的进口,其中n≥1的整数,初级流道的中部上设有总流入口151,末级流道的所述出口作为介质的排出口152。其中,分配座150沿第二清洁件300的转轴方向分布,即沿第二清洁件300的轴向分布。总流入口151与第二进口连通,也可以将上述总流入口151看作为第二进口,总流入口151与第一盒体500连接,通过第一盒体500向介质分配机构输送清洁溶液。在一实施例中,第一盒体500的第一出液口520通过出液管550与安装腔z的第二进口密封连通,出液管550上设有用于产生抽吸力的第二抽吸结构551,以驱使第一盒体500内的清洁溶液依次通过第一出液口520、出液管550、总流入口151后输送至安装腔z内。上述第二抽吸结构551优选为止流泵,可以理解地,第二抽吸结构551包括但不限于止流泵,还可以为水泵,或是其他抽吸结构。
94.在本发明中,n级流道具有2
n-1
个分支流道,同一级的所有分支流道形成2
n-2
组对称分布在分配座150上,其中n≥2;相邻两级流道中,前一级分支流道的一个出口作为后一级一个分支流道的进口,每个分支流道具有两个对称分布的出口。其中n+1级的分支流道的同一个出口对应的n+2级的两个分支流道,该两个分支流道对称分布在该n+1级的分支流道对应的n级分支流道的同一个出口的两侧。
95.进一步地,分配座150内部中空设置,以形成中空腔,中空腔沿分配座150的长度方
向延伸;n级流道设于中空腔内。分配座150包括底座1501;底座1501上设有向内凹陷的中空腔,中空腔的底部上设有与n级流道的排布一一对应的安装槽;及密封设在安装槽的槽口上的盖板1502,安装槽的内腔与盖板1502之间围成上述n级流道。在一实施例中,n取3,请参阅图23所示,分配座150上设有一级流道、二级流道和三级流道。总流入口151设在安装槽的槽壁上,末级流道的出口贯穿设在安装槽的槽底所在的底座1501的部分上。盖板1502面向安装槽一侧的内壁面上设有与安装槽的槽口对应的第一凸部s1;第一凸部s1密封插接在安装槽的槽口内。安装槽上相对的两侧壁分别与各自正对的中空腔的内壁之间形成第一卡槽和第二卡槽;盖板1502的内壁面上还设有位于第一凸部s1两侧外的第二凸部s2和第三凸部s3,第二凸部s2和第三凸部s3分别插接在第一卡槽和第二卡槽内。底座1501远离第一凸起w的一端呈向安装腔z内弯折的阻挡端155,阻挡端155的端面可抵接在第二清洁件的外圆周面上,以防止污水溶液飞溅出去。
96.为了使得排出口152具有较好的均流效果,在本发明中,排出口152内均设有至少一个匀流条1521,用于等分所述排出口。匀流条1521的数量不宜过多,匀流条1521设置过多会影响排出口152的出液速度。优选的,匀流条1521设置1条或是2条。为了进一步改善排出口152的均流效果,排出口152的出口端所在的底座1501的表面上,具有与排出口152一一对应连通且凹陷的均流腔154。均流腔154呈对称的锥型,排出口152分布在锥型的对称轴上。
97.在本发明中,安装腔z内还设有位于出液区j2的介质回收机构140,介质回收机构140与第二清洁件300相邻设置,用于第二清洁件300上污水溶液的回收。请参阅图25至图27所示,介质回收机构140包括:设于安装腔z内的刮板座141,刮板座141设有刮刃部1412、收容腔1411、与收容腔1411连通的排液口1413,收容腔1411和刮刃部1412沿第二清洁件300的轴向方向(转轴方向)延伸,刮刃部142与第二清洁件300的清洁面抵接,收容腔1411被配置为收集经由刮刃部142挤压清洁面获得的污水溶液;以及过滤件142,具有若干网孔,过滤件142设于收容腔1411内,且分布于第二清洁件300的清洁面和排液口1413之间。其中,刮刃部1412在出液区j2内靠近第一凸起w一侧形成刮污结构,刮刃部1412朝向安装腔z内伸出,且可挤压在第二清洁件300的外圆周面上。排液口1413与上述第二出口连通,也可以将排液口1413看作为上述第二出口,过滤件142较第二出口靠近第二清洁件300。过滤件142被配置为通过吸附污水溶液促使收容腔1411内形成负压,以使污水溶液向排液口1413方向流动。
98.具体地,刮板座141的底部设有与第二清洁件300的清洁面接触的摩擦面1414;摩擦面1414朝向远离清洁面的方向凹陷形成有收容腔1411,刮刃部1412朝向清洁面的方向凸设于收容腔1411腔口的边沿上,刮刃部1412与收容腔1411等长设置。
99.为了使得过滤件142具有吸附的功能,过滤件142采用具有液体吸附能力的吸附材料制成,可以选用海绵、硅胶、尼龙等材料。过滤件142上的若干网孔以阵列的方式排布,过滤件142可看成隔板类型的结构。为了减少过滤件140的磨损,过滤件142与第二清洁件300的清洁面之间存在预设间隙,由此,能够减少第二清洁件300在转动过程中与过滤件142之间的摩擦,延长了过滤件142的使用寿命。收容腔1411内设有连接配合部g,过滤件142设于连接配合部g上,连接配合部g被配置为在收容腔1411的腔壁上形成用于过滤件142安装和限位的台阶结构。由此,具有安装方便的优点。
100.考虑到刮板座141在工作时,一些脏污会附着于刮板座141上,需要经常拆卸进行清洁,由此,刮板座141采用可拆卸的方式设于安装腔z内。具体地,请参阅图26所示,刮板座
141上设有安装结构143,刮板座141通过安装结构143可拆卸设于目标件上,上述目标件为安装腔z。安装结构143包括设于刮板座141顶部的磁性件1431,刮板座141还设有用于收容磁性件1431的安装槽1432,磁性件1431被配置为通过磁力的作用使得刮板座141吸附于目标件上。可以理解地,安装腔z可选用能够吸附磁性物件的材料制成,也可以是,在安装腔z内设置磁性与磁性件1431相反的磁极,通过上述磁极与磁性件1431之间的吸合作用力实现刮板座141的安装。
101.在本发明中,上述介质回收机构140与第二盒体600连接,第二盒体600用于存储经由介质回收机构140收集的污水溶液。第二盒体600的第二进液口610通过进污管(图未示)与排液口1413连接。请参阅图9和图38所示,第二盒体600上还设有负压发生器,负压发生器用于使得第二盒体600内产生负压,这里的负压是指上述第三抽吸力,在第三抽吸力的作用下,第二清洁件300上的污水溶液通过介质回收机构140被吸入第二盒体600内。上述负压发生器的结构如下:包括设于第二盒体600上的抽真空口650、连接在抽真空口650上的软管652、设置在软管652上的真空泵651。过滤件142是辅助收容腔1411内形成负压,促使污水溶液朝向排液口1413流动。
102.本发明还提供了一种配合结构,配合结构包括上述集尘盒400、上述第一盒体500和上述第二盒体600,集尘盒400、第一盒体500以及第二盒体600中的任意一个可拆卸地设在机身100内,且第一盒体500和第二盒体600分布在集尘盒400的相对两侧壁外。优选的,集尘盒400、第一盒体500以及第二盒体600均适于可拆卸地设在机身100内。所述配合结构还包括:收容于机身100内的安装座130,第一盒体500、集尘盒400及第二盒体600分别可拆卸地设在安装座130上,安装座130可拆卸设于机身100内。安装座130上设有依次分布且间隔的第一凹槽、第二凹槽及第三凹槽;其中,第一盒体500、集尘盒400及第二盒体600分别可拆卸地设在第一凹槽、第二凹槽及第三凹槽内。第一凹槽、第二凹槽及第三凹槽设在安装座130的顶部上,第一盒体500、集尘盒400及第二盒体600沿竖向分别可拆卸安装在各自所在的凹槽内。安装座130的底部上还设有向上凹陷的凹陷区域x;安装腔z对应于凹陷区域x处,以供第二清洁件300安装。
103.在本发明中,机身100上设有清洁组件,清洁组件包括上述尘盒组件、上述第一清洁件200、上述第二清洁件300、上述安装座130、上述第一盒体500和上述第二盒体600,其中,第一盒体500和第二盒体600以轴对称的方式设于集尘盒400的两侧,尘盒组件设于安装座130内,安装座130的底部设有避让区k,以使进风口460与进风接口1123连通、排尘口470与排尘接口1124连通。
104.为了能够识别安装座130上是否安装了第一盒体500、集尘盒400及第二盒体600,安装座130上设有第一装配检测件131,集尘盒400、第一盒体500和第二盒体600上分别设有与第一装配检测件131配合的第二装配检测件132;其中,第一装配检测件131可为霍尔传感器,第二装配检测件132为可磁铁,第一装配检测件131与第二装配检测件132一一对应设置。由此,能够通过霍尔传感器和磁铁之间的感应,判断第一盒体500、集尘盒400及第二盒体600是否安装到位。可以理解地,第一装配检测件131与第二装配检测件132包括但不限于上述结构,还可以为其他可以互感的元件。
105.为了方便用户从安装座130上拆取集尘盒400,集尘盒400的顶部枢接有提手450,提手450与集尘盒400的枢接处设有凸部451。提手450具有初始状态和提拉状态;当提手450
处于初始状态时,提手450大致呈平行于集尘盒上表面的状态,当提手450处于提拉状态时,提手450大致呈垂直于集尘盒上表面的状态。在本发明中,凸部451被配置为响应于提手450在初始状态与提拉状态之间的改变而固定或是释放集尘盒400,从而实现集尘盒400与安装座130之间的可拆卸连接。请参阅图31至图35所示,安装座130上设有与凸部451配合的卡槽1301;当提手450处于初始状态时,凸部451与卡槽1301卡接;当提手450处于提拉状态时,凸部451从卡槽1301中脱离。提手450的边沿上还间隔设有卡块452,集尘盒400顶部上设有与卡块452配合的槽体480,槽体480位于集尘盒400与上盖440枢接的枢接处,当提手450处于水平状态时,上述卡块452卡设于槽体480内;当用户拉动提手450时,卡块452与槽体480脱离。
106.为了能够实时掌握第一盒体500内的液位情况,第一盒体500的第一储液腔内设有液位检测结构,在本发明中,第一储液腔在竖直方向上存在高度差,请参阅图36和图37所示,液位检测结构包括设于第一储液腔的最低位置处用于检测最低液位的第一导电件530和设于第一储液腔的最高位置处用于检测最高液位的第二导电件540,安装座130的第一凹槽内设有用于与第一导电件530配合的第一端子133和用于与第二导电件540配合的第二端子134。其中,清洁溶液为导电介质,当第一盒体500安装至安装座130的第一凹槽后,第一导电件530与第一端子133抵接,第二导电件540与第二端子134抵接。在本发明中,第一导电件530和第二导电件540是具有正负极的金属片,第一导电件530和第二导电件540裸露于第一盒体的底部,第一端子133和第二端子134是浮动设于安装座130的第一凹槽内的顶针,上述浮动是指第一端子133和第二端子134通过弹簧设于安装座130上。在将第一盒体500安装至安装座130上后,第一端子133和第二端子134分别与第一导电件和第二导电件相抵靠,以检测最低为例,当第一储液腔的最低位置处有清洁溶液时,第一导电件530的正极和负极被导通,从而形成电连接;当第一储液腔的最低位置处没有清洁溶液时,第一导电件530的正极和负极无法导通,即使第一导电件530与第一端子133抵接也不会形成电连接。
107.同样的,为了掌握第二盒体600内的液位情况,第二盒体600的第二储液腔内设有满载检测结构640,用于检测第二盒体600内的最高液位。第二盒体600与第一盒体500的不同之处在于:只需检测最高液位,无需关注最低液位。请参阅图39所示,满载检测结构640包括浮子641,浮杆642及永磁体(图未示),浮子641设于浮杆642的一端,浮杆642远离浮子641的一端通过摆动轴643可转动地设在第二盒体600内,永磁体固定在浮子641上,第二盒体600内设有与永磁体配合的霍尔传感器644,其中,浮子641的密度小于第二盒体内的污水溶液的密度。
108.进一步地,安装座130上设有用于与第一进液口510对接导通的第一进液接头135和用于与第一出液口520对接导通的第一出液接头136,其中,第一进液接头135和第一出液接头136位于第一凹槽的槽底。安装座130上设有用于与第二进液口610对接导通的第二进液接头137和用于与第二出液口620对接导通的第二出液接头138,其中,第二进液接头137和第二出液接头138位于第三凹槽的槽底。第一进液接头135连接有补液管1601,并通过补液管1601与补液截流机构160连接;第二出液接头138连接有排污管1701,并通过排污管1701与排污截流机构170连接。设置第一进液接头135、第一出液接头136、第二进液接头137和第二出液接头138的用意是:为了能够实现第一盒体500与安装座130之间的可拆卸连接、第二盒体600与安装座130之间的可拆卸连接。若不设置上述第一进液接头135、第一出液接
头136、第二进液接头137和第二出液接头138,那么第一进液口510、第一出液口520、第二进液口610和第二出液口620会直接与管路连接,就不便于将第一盒体500和第二盒体600从安装座130上取下。
109.考虑到第一盒体500在从安装座130上取下后,存在漏液的问题,在本发明中,第一进液口510和/或第一出液口520上设有第一截流机构,第一截流机构具有截断第一进液口510和/或第一出液口520的截断状态和打开第一进液口510和/或第一出液口520的开启状态;当第一盒体500与安装座130分离时,第一截流机构处于截断状态。具体地,第一截流机构的设置位置可分为三种情况:第一种,第一进液口510上设有第一截流机构,第一截流机构具有截断第一进液口510的截断状态和打开第一进液口510的开启状态;第二种,第一出液口520上设有第一截流机构,第一截流机构具有截断第一出液口520的截断状态和打开第一出液口520的开启状态;第三种,第一进液口510和第一出液口520上均设有第一截流机构,第一截流机构具有截断第一进液口510和第一出液口520的截断状态、打开第一进液口510和第一出液口520的开启状态。另外,还可通过在第一进液口510处设置中空延伸柱511解决第一进液口510处漏液问题,请参阅图37所示,中空延伸柱511收容于第一储液腔内,中空延伸柱511为顶部和底部开口的细管状件,中空延伸柱511的顶部开口贴近第一储液腔的腔顶设置。由此,在拆下第一盒体500后,第一储液腔中的液体无法从第一进液口510处漏下。
110.同理,考虑到第二盒体600在从安装座130上取下后,存在漏液的问题,在本发明中,第二进液口610和/或第二出液口620上设有第二截流机构630,第二截流机构630具有截断第二进液口610和/或第二出液口620的截断状态和打开第二进液口610和/或第二出液口620的开启状态;当第二盒体600与安装座130分离时,第二截流机构630处于截断状态。具体地,第二截流机构630的设置位置可分为三种情况:第一种,第二进液口610上设有第二截流机构630,第二截流机构630具有截断第二进液口610的截断状态和打开第二进液口610的开启状态;第二种,第二出液口620上设有第二截流机构630,第二截流机构630具有截断第二出液口620的截断状态和打开第二出液口620的开启状态;第三种,第二进液口610和第二出液口620上均设有第二截流机构630,第二截流机构630具有截断第二进液口610和第二出液口620的截断状态、打开第二进液口610和第二出液口620的开启状态。
111.在本发明中,第一截流机构、第二截流机构630、补液截流机构160以及排污截流机构170的结构相同。为了便于阐述,现以补液截流机构160为例进行阐述,请参阅图43所示,所述补液截流机构160包括:
112.阀体161,具有流体通道及与流体通道连通的流出口1611、进入口1612;流体通道内具有沿其内壁一圈分布的第一密封面1613;密封座162,可滑动地设在流体通道内;密封座162具有与第一密封面1613正对的第二密封面1614;密封体163,固定在第一密封面1613或第二密封面1614上;偏压件164,设在阀体161与密封座162之间,对密封座162施加朝向第一密封面1613的偏压力,使得密封座162抵靠在进入口1612上,以使补液截流机构160处于截断状态。在截断状态,受上述偏压力的作用,密封体163被夹持在第一密封面1613与第二密封面1614之间,密封第一密封面1613和第二密封面1614,在此状态,溶液无法在流体通道内流通。在开启状态,密封座162受外部顶出件的抵接力,而迫使第二密封面1614与第一密封面1613分离,在此状态下,流体通道内的溶液能够由进入口1612流向流出口1611。
113.具体地,密封座162包括活动设于流体通道内的阀芯1621,阀芯1621上设有上述第二密封面1614,将阀芯1621设有上述第二密封面1614的面体定义为第一端面,与第一端面背向的面体定义为第二端面。其中,第一端面上还设有通过进入口1612延伸至阀体161外侧的第一杆部1622,第一杆部1622用于与外部顶出件配合。第二端面上设有沿远离第一端面的方向延伸的第二杆部1623,第二杆部1623位于流体通道内用于阀芯1621的运动导向。流体通道内还设有沿第二杆部1623的延伸方向分布的导向槽1615,第二杆部1623插设在导向槽1615内,以实现阀芯1621的运动导向。第一杆部1622和第二杆部1623平行或是同轴分布。偏压件164优选为弹簧,偏压件164沿第一杆部1622和第二杆部1623的延伸方向分布,以使偏压件164提供的弹性力作用方向与阀芯1621的移动方向一致。密封体163为呈环状的密封圈,在一实施例中,密封体163固设于阀芯1621上,并且随阀芯1621一起运动,密封体163与第一密封面1613配合的面体上设有凸棱,用于改善密封性能。
114.在本发明中,第一进液接头135、第一出液接头136、第二进液接头137和第二出液接头138上是否需要设置外部顶出件t,可根据其所对应的第一进液口510、第一出液口520、第二进液610以及第二出液口620上是否设置截流机构而定。补液接口1122上的补液截流机构160和排污接口1121上的排污截流机构170则由外部设备而触发。
115.上述已经充分描述了第一盒体500、第二盒体600、第二清洁件300、安装腔z、介质分配机构以及介质回收机构之间的连接关系,本领域技术人员将理解循环系统如下的工作过程:
116.为了便于阐述,限定如下情况:只有第二出液口620上设置了第二截流机构y,第二进液610、第一进液口510和第一出液口520未设置截流机构。原因如下:第一出液口520处连接有过滤器560,在第一盒体500与安装座130分离时,第一储液腔内的液体不易通过第一出液口520外漏;第一进液口510处可采用延伸柱511结构,在第一盒体500与安装座130分离时,第一进液口510也不易漏液;同样,第二进液610也可采用如第一进液口510处的延伸柱511结构,在第二盒体600与安装座130分离时,第二进液610也不易漏液。第二出液口620的第二截流机构y在第二盒体600安装至安装座130上后被触发处于开启状态,第二出液口620的第二截流机构y只有当第二盒体600与安装座130分离时,才由开启状态改变为截断状态,具体工作过程如下:
117.在洗地机未与外部设备配合时,洗地机处于执行清洁任务状态,第一出液口520通过出液管550向安装腔z内介质分配机构输送清洁液体,介质分配机构润湿第二清洁件300,第二清洁件300湿拖待清洁表面;在此同时,第二盒体600在真空泵651产生的第三抽吸力的作用下,通过安装腔z内的介质回收机构和进污管将第二清洁件300上的污水溶液吸入第二储液腔内。当第一盒体500内的清洁溶液耗尽或是第二盒体600内存储的污水溶液满载时,洗地机与外部设备对接,用于补液或是排污。
118.在外部设备与洗地机配合后,补液接口1122上的补液截流机构160在外部设备的作用下处于开启状态,外部设备的补液箱内的清洁溶液依次通过补液接口1122
‑‑
补液截流机构160的进入口1612
‑‑
补液截流机构160的流出口1611
‑‑
补液管1601
‑‑
第一进液接头135
‑‑
第一进液口510后,向第一盒体500补入清洁溶液,此为补液过程。
119.在外部设备与洗地机配合后,排污接口1121上的排污截流机构170在外部设备的作用下处于开启状态,第二盒体600内的污水溶液依次通过第二截流机构y的进入口
‑‑
第二
截流机构y的流出口
‑‑
第二出液口620
‑‑
第二出液接头138
‑‑
排污管1701
‑‑
排污截流机构170的进入口
‑‑
排污截流机构170的流出口
‑‑‑‑
排污接口1121后,排入外部设备的第二回收箱,此为排污过程。
120.在本发明中,机身100包括机身本体110和浮动设于机身本体110前部的撞板组件,请参阅图11和图12所示,撞板组件包括:撞板本体120,撞板本体120呈阶梯状覆盖于洗地机的机身本体110的前部;第二触发机构,与外部驱动电路连接,被配置为在撞板本体120受到碰撞而发生移位的情况下,触发并向洗地机发出停止运动信号;缓冲机构,被配置为在撞板本体120发生进一步移位的情况下,对撞板本体120进行弹力缓冲;恢复机构,被配置为在撞板本体120发生移位的情况下,对撞板本体120发生的移位情况进行弹性恢复,恢复至机身本体110前部的中央部位。通过上述方式,阶梯状的撞板本体120能够实现洗地机运行方向前部及侧部的碰撞触发,有效提高了洗地机的整体避障能力。当撞板本体120发生碰撞时,撞板本体120和障碍物之间会因碰撞而产生冲击力,在冲击力的作用下,洗地机会产生振动和噪音,缓冲机构能够对撞板本体120进行弹力缓冲,有效地减少振动和降低噪音,提高了用户的使用舒适感,并且提高了洗地机的抗振性能。考虑到撞板本体120在多次碰撞后会与机身本体110之间产生形位偏差,上述形位偏差是指与出厂状态相比撞板本体120与机身本体110之间在位置和形状上的差异,上述形位偏差会导致洗地机发生了碰撞而不触发的情形,还影响外形的美观度,在本发明中,通过恢复机构能够减小或是消除上述形位偏差,从而保障触发的灵敏性和外观的美观度。
121.在本发明中,机身本体110包括圆盘状的主体p和凸设于主体p前方的前凸部q,以形成前方后圆的形状;前凸部q的顶端面低于主体p的顶端面,以在机身本体110的前部形成一阶梯结构,撞板本体120覆盖于上述阶梯结构上。撞板本体120包括覆盖于前凸部q外周面的第一撞板121和自第一撞板121的顶部向主体p的顶端面延伸的第二撞板122,第二撞板122呈弧形状且覆盖于主体p上。
122.第一撞板121和第二撞板122的设置形式如下:第一种情况,第一撞板121和第二撞板122一体设置;第二种情况,第一撞板121和第二撞板122上下分体设置。当第一撞板121和第二撞板122采用上下分体设置的形式时,第一撞板121和第二撞板122在安装时不可避免的会存在安装缝隙,外界的灰尘、水汽能够通过安装缝隙进入洗地机内部,为了避免上述情况的发生,在第一撞板121和第二撞板122的连接处设置橡胶密封件(图未示),通过设置上述橡胶密封件能够有效减小或是杜绝外部灰尘和水汽进入洗地机内部,能够在一定程度上延长设备的使用寿命。
123.为了能够实现机身本体110前方全方位地识别障碍物,第二触发机构包括多个触发感应器124,触发感应器124的一端与撞板本体120抵接,多个触发感应器124分布于阶梯结构的前侧和阶梯结构的两侧,上述阶梯结构的两侧为洗地机前进方向的左右两侧。由此,在机身本体110向前运行的过程中,其前端和左右两端都能够实现碰撞触发,能够全方位地识别障碍物,可及时调整洗地机的运行状态。
124.具体地,分布于阶梯结构前侧面体上的多个触发感应器124分成上下两组设置,第一组设于主体p对应于第二撞板122的前向面体上,第二组设于前凸部q对应于第一撞板121的前侧面体上。由此,不管撞板本体120与障碍物的碰撞区位于撞板本体120的顶部、底部还是中部都能够顺利触发触发感应器124,具有触发灵敏度高的优点。上述多个触发感应器
124为碰撞开关,当然可以理解地,上述多个触发感应器124包括但不限于碰撞开关,还可以为其他的能够实现碰撞触发器件和结构。
125.进一步地,缓冲机构包括设于前凸部q上用于第一撞板121碰撞缓冲的多个第一弹力缓冲元件125和设于主体p上用于第二撞板122碰撞缓冲的多个第二弹力缓冲元件126。其中,第一弹力缓冲元件125和第二弹力缓冲元件126采用弹性材料制成,上述弹性材料可以为橡胶、尼龙、海绵等。在撞板本体120与障碍物发生碰撞时,障碍物会对撞板本体120产生反作用力,撞板本体120上的反作用力能够驱使撞板本体120朝向机身本体110侧运动,上述运动造成撞板本体120发生进一步移位,第一弹力缓冲元件125和第二弹力缓冲元件126能够吸收部分碰撞时产生的冲击力,实现弹力缓冲。多个第一弹力缓冲元件125之间可以间隔分布,也可以是依次连接形成连续分布的设置方式。同理,多个第二弹力缓冲元件126可以间隔分布,也可以连续分布。在本发明中,第一弹力缓冲元件125和第二弹力缓冲元件126优选以可拆卸的方式设于机身本体110上,由此,能够方便地进行更换。
126.进一步地,恢复机构包括至少一弹性元件123,撞板本体120通过弹性元件123浮动设于机身本体110的前部,弹性元件123设于机身本体110上且与撞板本体120连接。弹性元件123优选为弹簧,弹性元件123的一端与机身本体110卡接,弹性元件123的另一端与撞板本体120卡接。为了使得撞板本体120回复位置并保持在机身本体110前部的中央位置,弹性元件123以轴对称的方式设于机身本体110上,且任意一对弹性元件123的前端部之间的距离小于一对弹性元件123的后端部之间的距离。
127.在本发明中,机身本体110包括底盖112和顶盖111,底盖112的底部设有第一吸尘口f、安装腔z、驱动轮组、万向轮、第一清洁件200和第二清洁件300,顶盖111的顶部枢接有装饰盖113。装饰盖113具有覆盖于集尘盒400、第一盒体500和第二盒体600上方以使集尘盒400、第一盒体500和第二盒体600封闭于机身本体110内的关闭状态和绕枢接轴向上翻转使得集尘盒400、第一盒体500和第二盒体600裸露于外部的打开状态。由此,能够方便的拆取集尘盒400、第一盒体500和第二盒体600,还能够方便的更换集尘盒400上的海帕,具有使用方便的优点。
128.在本发明中,机身本体110内部具有安装区m,安装区m顶部开口设置,安装区m的顶部开口处设有识别系统,所述识别系统包括:测距机构1111,设于自移动清洁设备的机身100的顶部外,且位于安装区m的顶部开口内,测距机构1111具有裸露于机身100外侧的第一状态和收容于机身100内的第二状态;支撑结构700,设于机身100内,且支撑于测距机构1111的下方;感测单元1112,设于机身100上,且与支撑结构700连接,感测单元被配置为判断外界障碍物的高度,以形成控制支撑结构700升降的驱动信号;以及控制器(图未示),与所述感测单元连接;其中,支撑结构700响应于感测单元1112的驱动信号而驱使测距机构1111在第一状态和第二状态之间切换。测距机构1111位于机身100的后部,且测距机构1111较第二清洁件300处于机身100前进方向的后方。当测距机构1111处于第一状态时,测距机构1111高于感测单元,测距机构1111可以为lds激光雷达机构,也可以为其他类型的测距装置,上述测距机构1111虽然名称为测距,但是其还可以具有建立地图、定位、识别障碍物等功能。
129.通过上述方式,本发明中的识别系统能够根据周边障碍物信息而及时调节整机高度,使得洗地机能够进入低矮空间进行清洁作业。上述整机高度是指:在测距机构1111处于
第一状态下,机身100与测距机构1111的高度之和;上述低矮空间是指高度高于机身100高度且低于整机高度的空间区域。当洗地机遇到低矮空间时,机身100上的感测单元1112向支撑结构700发出驱动信号,驱使测距机构1111缩入机身100内,此时,洗地机能够顺利进入低矮空间进行清洁作业。当洗地机运行至低矮空间外侧时,在感测单元1112的驱动信号的作用下,支撑结构700驱使测距机构1111向上抬升,切换方便,有效提高了清扫能力。
130.为了使得测距机构1111在缩入机身100内部的情况下也可以正常使用,在本发明中,机身100靠近测距机构1111的侧壁上设有第一透视窗1114,第一透视窗1114被配置为当测距机构1111处于第二状态时以便于测距机构1111感测外界环境,便于控制洗地机继续工作。由此,解决了当测距机构1111处于第二状态时,测距机构1111无法进行位置识别、定位判断的痛点,有效提高了洗地机在低矮空间的清洁能力和智能识别能力。
131.进一步地,机身100上设有多个感测单元1112,至少一个感测单元1112设于机身100顶部,至少一个感测单元1112分布于测距机构1111的前侧。在一实施例中,感测单元1112为tof传感器,多个感测单元1112分布于测距机构1111的前侧、左侧和右侧。由此,能够全方位的收集测距机构1111周边障碍物的高度信息,在测距机构1111与障碍物碰撞之前及时作出反馈,调整测距机构1111的位置状态。
132.具体地,请参阅图7所示,机身100的机身本体110的顶部设有用于安装多个感测单元1112的收容槽,收容槽位于测距机构1111的前方且靠近测距机构1111分布。收容槽的顶部开口,感测单元1112通过上述顶部开口安装至收容槽内。收容槽的顶部开口处还覆盖有第二透视窗127,第二透视窗127用于将多个感测单元1112封装在收容槽内,其中,收容槽呈弧形,多个感测单元1112间隔分布在收容槽内。
133.考虑到感测单元1112可能无法顺利识别尖锐障碍物,在测距机构1111和支撑结构700之间设置第一触发机构,第一触发机构响应于测距机构1111与障碍物的碰撞而被触发,使得测距机构1111由第一状态切换至第二状态。在此情况下,测距机构1111可移动设于支撑结构700的上方,当测距机构1111与障碍物碰撞时,测距机构1111在外力的作用下运动进而触发第一触发机构。请参阅图46和图47所示,上述第一触发机构包括触发开关1113和弹性元件1117,触发开关1113设于测距机构1111的运动路径上,由此,当测距机构1111在外力作用下运动时,能够触发上述触发开关1113,触发开关1113与支撑结构700之间电连接,以实现触发信号的传递。弹性元件1117被配置为使得测距机构1111浮动设于支撑结构700的上方;在测距机构1111未与障碍物发生碰撞时,弹性元件1117可使测距机构1111的底部与触发开关1113之间保持既定触发距离;在测距机构1111与与障碍物发生碰撞后,弹性元件1117用于驱使测距机构1111复位。上述弹性元件1117优选为弹簧,具体地,弹性元件1117的顶端部与测距机构1111卡接,弹性元件1117底端部与支撑结构700卡接。由此,上述测距机构1111接收外界障碍物的碰撞力的驱动,以控制支撑结构700做下降运动。
134.进一步地,测距机构1111和支撑结构700之间设有运动转换结构,运动转换结构构造为当测距机构1111在运行方向上发生碰撞时使得测距机构1111在运行方向上受碰撞力产生的水平位移分量至少部分转换为竖直位移分量;其中,水平位移分量小于竖直位移分量。上述水平位移分量小于竖直位移分量的意思是:测距机构1111在水平方向上的位移量小于测距机构1111在竖直方向上的位移量。请参阅图46所示,运动转换结构包括导向槽1115和限位杆1116,二者之一设于测距机构1111底部,另一个设于支撑结构700顶部,限位
杆1116两端贯穿导向槽1115,其中,导向槽1115相对水平面倾斜设置,以使测距机构1111具有向下及向后的运动态势。
135.进一步地,请参阅图47所示,支撑结构700包括机架710、滑动座720、驱动机构730以及导向单元740,机架710设于机身本体110的安装区m内,滑动座720支撑于测距机构1111的底部,并且受驱动机构730的驱动可升降地设在机架710上,驱动机构730响应于控制器的控制信号而驱使滑动座720升降,导向单元740用于引导滑动座720沿竖向做升降运动。
136.具体地,驱动机构730包括驱动器731,设在机架710上,且与控制器连接,用于执行控制器的控制信号;传动件732,底部固定于驱动器731的转轴上、顶部铰接在滑动座720的底部上。导向单元740上还设有用于限制滑动座720的上运动极限位置和下运动极限位置的微动开关(图未示)。
137.在本发明中,撞板组件中的第二触发机构与支撑结构700中的驱动机构730连接,第二触发机构与驱动机构730之间通过线路连接,第二触发机构响应于撞板本体120与障碍物的碰撞而被触发,使得测距机构1111由第一状态切换至第二状态。
138.在本发明中,机身100的侧壁上设有线激光模组800,线激光模组800用于检测机身100的外侧壁与外部的清扫边界之间的距离。具体地,线激光模组800设于机身本体110的侧壁上,线激光模组800能够精准测量机身100工作时与外部清扫边界之间的距离,保证机身100贴边清洁。
139.可以理解地,本发明中的自移动清洁设备可以应用到不同的使用场景,下面举例进行说明。
140.本发明中的自移动清洁设备可以应用于清洁系统。其中,该清洁系统包括清洁基站(图未示)和所述的自移动清洁设备,其中,清洁基站用于放置自移动清洁设备并进行排尘、补液和排污作业。清洁基站设有第一回收箱、第二回收箱和补液箱,在清洁基站与自移动清洁设备的机身100的接口配合时,以使机身100的排尘口470和进风口460分别适于与清洁基站的第一回收箱连通,用于排尘;以使第一进液口510与补液箱的补液腔连通,用于补液;以使第二出液口620与第二回收箱的第二回收腔连通,用于排污。
141.上述仅为本发明的一个具体实施方式,其它基于本发明构思的前提下做出的任何改进都视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1