一种清洁作业控制方法及装置与流程
1.本发明涉及清洁作业设备的控制技术领域,尤其是涉及一种清洁作业控制方法及装置。
背景技术:
2.现代生活中,清洁作业装置的应用越来越广泛,通过清洁作业装置可以自动完成地面的清洁工作。
3.申请公开号为cn106264342a且名称为清洁机器人及其控制方法专利,包括:获取充电桩的所在位置;控制所述清洁机器人行进至所述所在位置的前方位置;控制所述清洁机器人的充电极片对准所述充电桩上的充电弹片;控制所述清洁机器人按预定方式向所述充电桩行进;在检测到所述清洁机器人与所述充电桩之间的距离小于预定距离时,控制所述清洁机器人在第一时间段内以第一速度参数向所述充电弹片行进,在第二时间段内以第二速度参数向所述充电弹片行进;所述第一速度参数大于所述第二速度参数;解决了清洁机器人在上桩充电后可能会出现从充电桩脱落的问题,达到了令清洁机器人能够准确地上桩,在充电过程中不轻易地从充电桩脱落的效果。
4.上述中的现有技术方案存在以下缺陷:清洁作业装置只能基于预设的路径进行恒速移动清洁,且清洁的过程中也只会保持设定档量洒水,而在实际应用过程中,清洁作业装置在基于预设路径行驶的过程中也常会遭遇障碍、减速带、转弯等,若是保持恒速移动,会导致清洁作业装置发生剧烈碰撞甚至于无法移动,而且保持设定档量洒水在出现清洁作业装置因为碰撞停滞的时候容易使地面产生积水,影响地面清洁度。
技术实现要素:
5.本发明的目的一是提供一种具有基于清洁作业装置的清洁路径智能化调控其行驶速度和相应洒水档次,提高整体的清洁效率和质量的效果的清洁作业控制方法。
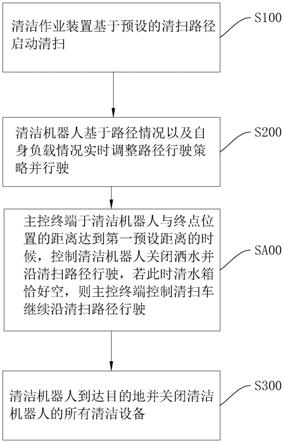
6.本发明的上述发明目的是通过以下技术方案得以实现的:一种清洁作业控制方法,包括以下步骤:步骤s100:清洁作业装置基于预设的清扫路径启动清扫;步骤s200:清洁作业装置基于路径情况以及自身负载情况实时调整路径行驶策略行驶,并基于移动速度调节洒水量;步骤s300:清洁作业装置到达目的地并关闭清洁作业装置的所有清洁设备。
7.通过采用上述技术方案,通过步骤s100、步骤s200、步骤s300的结合设置有效公开了清洁作业装置如何基于划设的清扫路径实现安全兼顾效率的清扫效果。
8.本发明进一步设置为:步骤s100包括以下步骤:步骤s110:主控终端识别操作界面所划设的清洁作业装置清扫路径;步骤s120:主控终端启动清洁作业装置开始清扫。
9.通过采用上述技术方案,通过步骤s110、步骤s120的结合设置有效公开了具体如
何由划设的清扫路径至控制清洁作业装置启动,更好的方便了操作人员基于个人的实际清扫需要控制清洁作业装置。
10.本发明进一步设置为:步骤s200包以下步骤:步骤s210:主控终端控制清洁作业装置沿清扫路径逐渐加速移动;步骤s220:主控终端基于清洁作业装置的移动速度调节洒水量,其至少预设有关闭水阀所对应的清洁作业装置移动速度范围以及洒水所对应的清洁作业装置移动速度范围。
11.通过采用上述技术方案,通过步骤s210以及步骤s220有效公开了清洁作业装置具体如何基于清扫路径进行行驶以及洒水,有效保证了清洁作业装置在行驶路径上的清洁效果。
12.本发明进一步设置为:步骤s220所提及的洒水所对应的清洁作业装置移动速度范围至少划分为3个,以分别对应不同档次的洒水量,具体如下:当清洁作业装置的移动速度达到或超过关闭水阀所对应的清洁作业装置移动速度范围且小于第一预设移动速度时,主控终端控制清洁作业装置采用1档水量洒水;当清洁作业装置的移动速度达到或超过第一预设速度且小于第二预设速度,主控终端控制清洁作业装置采用2档水量洒水;当清洁作业装置的移动速度达到或超过第二预设速度,主控终端控制清洁作业装置采用3挡水量洒水,其中3档水量的洒水量超过2档水量的洒水量,2档水量的洒水量超过1档洒水量。
13.通过采用上述技术方案,对清洁作业装置具体如何基于不同移动速度作洒水量的管控进行了具体的公开。
14.本发明进一步设置为:步骤s200还包括设置于步骤s210和步骤s220之间且位于步骤s210之后的步骤s21a:若清扫路径存在不可通过障碍物,则主控终端控制清洁作业装置于距离不可通过障碍物的第二预设距离时降速至安全速度通过;若清扫路径存在障碍物,则主控终端控制清洁作业装置于距离障碍物的第一预设距离时绕过障碍物;若存在清洁作业装置于遇到当前障碍物之前刚通过障碍物,且两者障碍物距离清洁作业装置的车身距离之和小于第一预设距离,则主控终端控制清洁作业装置停止行驶。
15.通过采用上述技术方案,通过设置于步骤s210和步骤s220之间的步骤s21a有效考虑了清洁作业装置在沿路径行驶过程中可能会遭遇到的状况以及应对不同状况采取的行进策略,保证了清洁作业装置的安全有效前行。
16.本发明进一步设置为:步骤s21a所提及的通过不可通过障碍物的具体方式如下:若不可通过障碍物为转弯处,则主控终端控制清洁作业装置于临近转弯处时降速并于通过转弯处降速至安全通过转弯处的第一安全速度;若若不可通过障碍物为减速带,则主控终端控制清洁作业装置于临近减速带时降速至安全通过减速带的第二安全速度。
17.通过采用上述技术方案,公开了在遇到具体不同的不可通过障碍物时所采用的方式,以便于清洁作业装置更好的行驶。
18.本发明进一步设置为:步骤s200还包括位于步骤s210之后且与步骤s21a并行运行的步骤s21b:若清洁作业装置的清水箱液位为0时,主控终端控制清洁作业装置暂停清扫并自动去加水点重新加满水返回暂停点继续清扫,其中,清水箱用于提供清洁作业装置洒水;若清洁作业装置的污水箱的液位达到最高液位处时,则主控终端控制清洁作业装置暂停清扫并自动去排污点排完污水后返回暂停点继续清扫,其中,污水箱为清洁作业装置于洒水处擦拭后获取的污水存储处。
19.通过采用上述技术方案,通过步骤s21b的设置有效考虑到清洁作业装置的清水箱以及污水箱情况并基于清水箱、污水箱的情况及时有效进行调整,从而更好的保证清洁作业装置及时有效清扫。
20.本发明进一步设置为:步骤s200还包括位于步骤s210之后且与步骤s220并行运行的步骤s2a0:主控终端通过拍摄装置实时拍摄确定清洁作业装置的清扫面积以及清扫覆盖率,并基于清洁作业装置的运行时间确定清洁作业装置的清扫效率,并实时上传清洁作业装置的清扫面积、清扫覆盖率、清扫效率至显示终端显示。
21.通过采用上述技术方案,通过步骤s2a0的设置有效方便操作人员在需要的时候能够及时有效查询获取清洁作业装置的相关性能指标。
22.本发明进一步设置为:清洁作业控制方法还包括设置于步骤s200和步骤s300之间且位于步骤s200之后的步骤sa00,步骤sa00具体如下:主控终端于清洁作业装置与终点位置的距离达到第二预设距离的时候,控制清洁作业装置关闭洒水并沿清扫路径行驶,若此时清水箱的液位为0,则主控终端控制清扫车继续沿清扫路径行驶。
23.通过采用上述技术方案,通过步骤sa00的设置有效保证了清洁作业装置在靠近清扫路线终点时先提前一段距离关闭清洁作业装置的洒水从而避免后面残留水迹。
24.本发明的目的二是提供一种清洁作业控制装置,基于清洁作业装置的清洁路径智能化调控其行驶速度和相应洒水档次,提高整体的清洁效率和质量的效果。
25.一种清洁作业控制装置,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的程序,该程序能够被处理器加载执行时实现如上述权利要求任一项所述的清洁作业控制方法。
26.通过采用上述技术方案,基于清洁作业装置的清洁路径智能化调控其行驶速度和相应洒水档次,提高整体的清洁效率和质量的效果综上所述,本发明的有益技术效果为:主控终端基于清洁作业装置的清洁路径调控其行驶速度和相应洒水档次,有效提高了清洁作业装置对地面的清洁质量和清洁效率。
附图说明
27.图1是本发明清洁作业控制方法的整体步骤示意图。
28.图2是图1中步骤s100的具体步骤示意图。
29.图3是图1中步骤s200的部分步骤示意图。
30.图4是步骤s200除图3外的剩余步骤示意图。
具体实施方式
31.以下结合附图对本发明作进一步详细说明。
32.参照图1,为本发明公开的一种清洁作业控制方法,包括步骤s100至步骤s300。
33.在步骤s100中,清洁作业装置基于预设的清扫路径启动清扫。
34.其中,步骤s100可分为步骤s110至步骤s120,参看图2。
35.步骤s110为:主控终端识别操作界面所划设的清洁作业装置清扫路径。
36.举例来说,操作界面为终端设备上的显示界面,在操作人员通过屏幕触碰操作、按键操作等相应方式下会基于对应操作的指令执行相应程序,此处所对应的指令指操作人员划设形成的清扫路径,划设方式可以为屏幕触碰操作、按键操作以及其他远程操作方式。
37.步骤s120为:主控终端启动清洁作业装置开始清扫。
38.其中,清洁作业装置开启清扫时,首先放下刷盘和刮水器。
39.在步骤s200中,清洁作业装置基于路径情况以及自身负载情况实时调整路径行驶策略并行驶。
40.其中,步骤s200包括呈依次顺序的步骤s210、步骤s21a和步骤s21b、步骤s220和步骤s2a0,其中步骤s21a和步骤s21b为并行同步运行的步骤,步骤s220和步骤s2a0为并行同步运行的步骤,具体参看图3。
41.步骤s210为:主控终端控制清洁作业装置沿清扫路径逐渐加速移动。
42.其中,此处清洁作业装置通过逐渐加速到最大速度,此处最大速度优选为1.2m/s。
43.步骤s21a为:若清扫路径存在不可通过障碍物,则主控终端控制清洁作业装置于距离不可通过障碍物的第二预设距离时降速至安全速度通过;若清扫路径存在障碍物,则主控终端控制清洁作业装置于距离障碍物的第一预设距离时绕过障碍物;若存在清洁作业装置于遇到当前障碍物之前刚通过障碍物,且两者障碍物距离清洁作业装置的车身距离之和小于第一预设距离,则主控终端控制清洁作业装置停止行驶。
44.其中,步骤s21a所提及的通过不可通过障碍物的具体方式如下:若不可通过障碍物为转弯处,则主控终端控制清洁作业装置于临近转弯处时降速并于通过转弯处降速至安全通过转弯处的第一安全速度;若若不可通过障碍物为减速带,则主控终端控制清洁作业装置于临近减速带时降速至安全通过减速带的第二安全速度。
45.此处第一安全速度优选为为0.2m/s,第二安全速度优选为0.2m/s,第一预设距离为0.2m,此处障碍物可以为椅子、桌子等相关遮挡清洁作业装置前行的实体物。
46.另外,举例来说,清洁作业装置遇到障碍时,如果前方障碍离车身最近距离大于0.2m就尝试绕过,如果小于0.2m就先后退直到大于0.2m/s再尝试绕过,如果前后障碍离车身最近距离均小于0.2m就原地停止。
47.与步骤s21a并行运行的步骤s21b如下。
48.若清洁作业装置的清水箱液位为0时,主控终端控制清洁作业装置暂停清扫并自动去加水点重新加满水返回暂停点继续清扫,其中,清水箱用于提供清洁作业装置洒水。
49.若清洁作业装置的污水箱的液位达到最高液位处时,则主控终端控制清洁作业装置暂停清扫并自动去排污点排完污水后返回暂停点继续清扫,其中,污水箱为清洁作业装置于洒水处擦拭后获取的污水存储处。
50.另外,若加水点和排污水点为临近位置,其相互距离小于0.5m即判定为临近距离,则清洁作业装置返回至加水点或排污水点的时候,依次进行排污和加水,并返回至暂停点继续清扫。
51.参看图4,主控终端基于清洁作业装置的移动速度调节洒水量,其至少预设有关闭水阀所对应的清洁作业装置移动速度范围以及洒水所对应的清洁作业装置移动速度范围。
52.步骤s220所提及的洒水所对应的清洁作业装置移动速度范围至少划分为3个,以分别对应不同档次的洒水量,具体如下。
53.当清洁作业装置的移动速度达到或超过关闭水阀所对应的清洁作业装置移动速度范围且小于第一预设移动速度时,主控终端控制清洁作业装置采用1档水量洒水。
54.当清洁作业装置的移动速度达到或超过第一预设速度且小于第二预设速度,主控终端控制清洁作业装置采用2档水量洒水。
55.当清洁作业装置的移动速度达到或超过第二预设速度,主控终端控制清洁作业装置采用3挡水量洒水,其中3档水量的洒水量超过2档水量的洒水量,2档水量的洒水量超过1档洒水量。
56.举例来说,为了避免浪费水或残留水迹,当速度小于0.1m/s时关闭水阀,当速度超过0.1m/s时打开水阀开始洒水;水量会根据速度大小分3挡进行动态调整,速度在0.1~0.4m/s之间采用1挡水量,速度在0.4
‑
0.8m/s之间时采用2挡水量,速度在0.8~1.2m/s之间时采用3挡水量。
57.与步骤s220并行运行的步骤s2a0为:主控终端通过拍摄装置实时拍摄确定清洁作业装置的清扫面积以及清扫覆盖率,并基于清洁作业装置的运行时间确定清洁作业装置的清扫效率,并实时上传清洁作业装置的清扫面积、清扫覆盖率、清扫效率至显示终端显示,此处所指显示终端可为手机、电脑等相关可显示数据的终端设备。
58.在步骤s200之后为步骤sa00,步骤sa00具体如下:主控终端于清洁作业装置与终点位置的距离达到第二预设距离的时候,控制清洁作业装置关闭洒水并沿清扫路径行驶,若此时清水箱的液位为0,则主控终端控制清扫车继续沿清扫路径行驶,此处第二预设距离优选为1m,此处清洁作业装置及时关掉水阀停止洒水以免后面残留水迹。
59.在步骤sa00之后为步骤s300,步骤s300为:清洁作业装置到达目的地并关闭清洁作业装置的所有清洁设备。
60.此时清洁作业装置关闭并收起吸盘和刮水器。
61.本发明实施例提供一种清洁作业控制装置,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的程序,该程序能够被处理器加载执行图1
‑
图4中的各个步骤。
62.本具体实施方式的实施例均为本发明的较佳实施例,并非依此限制本发明的保护范围,故:凡依本发明的结构、形状、原理所做的等效变化,均应涵盖于本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1