一种扫地机器人的制作方法
1.本技术涉及智能家用电器的领域,尤其是涉及一种扫地机器人。
背景技术:
2.扫地机器人,又称自动打扫机、智能吸尘机、机器人吸尘器等,是智能家用电器的一种,能凭借一定的人工智能,可以自动在房间内完成地板清理工作。一般采用刷扫和真空方式,将地面杂物先吸纳进入自身的垃圾收纳盒,从而完成地面清理的功能。一般来说,将完成清扫、吸尘、擦地工作的机器人,也统一归为扫地机器人。
3.扫地机器人的机身为无线机器,以圆盘型为主,主要使用充电电池作为能源运作,操作方式多以遥控器、或是机器上的操作面板进行设定控制。一般能设定时间预约打扫、自行充电等等,在机身的前方一般设置感应器,可侦测障碍物,如碰到墙壁或其他障碍物,会自行转弯,每间厂商会配合机身整体设定机器的清理路径,在室内反复行走,如:沿边清扫、集中清扫、随机清扫、直线清扫等路径打扫,并辅以边刷、中央主刷旋转、抹布等方式,从而加强打扫效果,完成拟人化居家清洁效果,有规划地清扫地面。
4.扫地机器人最早在欧美市场进行销售,随着国内生活水平的提高,逐步进入中国,因为其简单操作的功能及便利性,现今已慢慢普及,成为上班族或是现代家庭的常用家电用品。但是,就目前而言,扫地机器人清扫出来的垃圾一般都只能暂存在扫地机器人的机身内部,往往需要在扫地机器人清理完地面后对垃圾进行清理,由于扫地机器人本身的体积就不大,存储垃圾的位置并不宽裕,此问题需要进行改进。
技术实现要素:
5.为了对清理完的垃圾进行更大空间的储放,本技术提供一种扫地机器人。
6.本技术提供的一种扫地机器人,采用如下的技术方案:一种扫地机器人,包括:扫地机本体,所述扫地机本体具有清扫部以及暂存部,所述清扫部的输入端与地面相对接、输出端与所述暂存部相对接,所述暂存部的输入端与所述清扫部相对接、输出端处设置有排出口,所述排出口处活动安装有密闭板,垃圾经由清扫部进行清理、清理后的垃圾转入暂存部进行存放再从排出口处进行排放;扫地机垃圾集成筒,所述扫地机垃圾集成筒内设置有负压装置以及存放部,所述扫地机垃圾集成筒上与所述排出口位置相对应处设置有吸入口,所述吸入口与所述存放部之间通过设置有预设槽道进行接通,所述负压装置的输出端与所述存放部内部空间相接连;所述扫地机本体的排出口与所述扫地机垃圾集成筒的吸入口相对接,所述负压装置工作时将垃圾从扫地机本体的暂存部经由排出口、吸入口以及预设槽道转移至所述扫地机垃圾集成筒的存放部内。
7.通过采用上述技术方案,扫地机本体以及扫地机垃圾集成筒相配合,可以提高清理过程中垃圾的储放空间,可以在扫地机本体对地面进行多次清洁后、倒放多次垃圾后,再
对垃圾进行统一清理,优化了清理过程中填满扫地机本体后需要人工清理垃圾的过程,便捷了扫地机器人的使用方式。
8.优选的,所述暂存部包括有收集箱,所述收集箱安装在所述扫地机本体内,所述收集箱具有入料口,所述入料口与所述清扫部的输出端相接用于接入由清扫部清理后的垃圾,所述入料口位置处活动设置有封闭板,所述清扫部工作时打开封闭板将垃圾从地面上收入至收集箱内。
9.通过采用上述技术方案,垃圾经由清扫部清扫后均收集在扫地机本体内的收集箱中,使得扫地机本体具有暂存垃圾的功能,通过封闭板的设置,使得垃圾进去收集箱后,难以再次抖出来。
10.优选的,所述收集箱内壁安装有弧形条,所述封闭板上安装有凸挂部,所述凸挂部靠近封闭板的一侧设置有倒钩,所述封闭板通过凸挂部活动挂设在所述弧形条上。
11.通过采用上述技术方案,弧形条、凸挂部以及倒钩的配合设置,可以使得封闭板安装在收集箱的内部,可以对垃圾进行阻挡,使得垃圾进去收集箱后,难以再次抖出来。
12.优选的,所述排出口处固定有内环,所述密闭板铰接在所述内环底部,所述密闭板的铰接部位置处套设有扭簧。
13.通过采用上述技术方案,内环配合扭簧的设置,可以使得密闭板紧贴设置在收集箱底部,对收集箱进行密闭,减少非受力情况下,垃圾从排出口位置处落下。
14.优选的,所述存放部包括设置在扫地机垃圾集成筒内的存放箱以及活动设置在所述存放箱中的储料袋,所述存放箱内壁贯穿开设有进料口,所述进料口与所述吸入口通过预设槽道相接通,所述储料袋可拆卸式安装所述进料口位置处。
15.通过采用上述技术方案,采用存放箱与储料袋,可以使得垃圾经过负压装置的作用从扫地机本体转移至存放箱与储料袋中,对垃圾进行统一的收集以及存放,方便使用者后续对垃圾进行清理。
16.优选的,所述储料袋袋口处设置有卡板,所述进料口位置处设置有与大小尺寸卡板相适配的卡槽,所述储料袋与所述存放箱相卡合设置。
17.通过采用上述技术方案,卡板以及卡槽的配合设置,方便储料袋与存放箱两者进行较为便捷的安装。
18.优选的,所述卡板包括有基板以及插板,所述基板与所述储料袋相装配,所述基板具有第一通口,所述储料袋内部空间与所述第一通口相接连,所述基板的内部开设有插入槽,所述插板插入连接在所述插入槽内,所述插板具有第二通口。
19.通过采用上述技术方案,基板以及插板的配合设置,在储料袋从卡槽中取出后或者从存放箱取出后,可以对储料袋进行密闭,减少垃圾的溢出。
20.优选的,所述扫地机本体底部安装有位移部件,所述扫地机垃圾集成筒设置有装配座,所述装配座由远离扫地机垃圾集成筒至靠近扫地机垃圾集成筒方向依次设置有倾斜向上的入库坡以及呈凹陷状的定位槽,所述吸入口设置在所述装配座上,所述吸入口位置处安装有外环,所述外环上设置有缓冲环。
21.通过采用上述技术方案,位移部件可以使得扫地机本体进行灵活运动,入库坡的设置方便扫地机本体与扫地机垃圾集成筒之间进行配合,方便扫地机本体的驶入,定位槽的设置方便对于扫地机本体驶入扫地机垃圾集成筒后进行扫地机本体的定位,外环以及缓
冲环的配合设置可以减少扫地机本体定位后产生的响声,减少扫地机本体抖落卡合在扫地机垃圾集成筒时的硬性碰撞。
22.优选的,所述扫地机本体底部伸出有充电子接头,所述装配座顶壁伸出有充电母接头,所述充电子接头与所述充电母接头相适配。
23.通过采用上述技术方案,充电子接头与充电母接头相适配设置,可以使得扫地机本体与扫地机垃圾集成筒之间进行垃圾转移的时候,顺便进行充电。
24.优选的,所述扫地机本体底部开设有多个安装槽,所述扫地机本体底部设置有用于辅助清扫部进行地面清理的转动扫,所述转动扫可拆卸式安装在所述安装槽内,所述扫地机本体底部设置有光流传感器,所述光流传感器同样可拆卸式安装在所述安装槽内。
25.通过采用上述技术方案,扫地机本体底部的安装槽既可以安装转动扫又可以光流传感器,使得扫地机本体的适用性更强,通过安装槽以及转动扫、光流传感器的配合设置,使用者可以根据地面类别对扫地机本体进行调整,需要辅助清理,则安装多些转动扫;需准确清理,则安装多些光流传感器。
26.综上所述,本技术包括以下至少一种有益技术效果:1.扫地机本体以及扫地机垃圾集成筒相配合,可以提高清理过程中垃圾的储放空间,可以在扫地机本体对地面进行多次清洁后、倒放多次垃圾后,再对垃圾进行统一清理,优化了清理过程中填满扫地机本体后需要人工清理垃圾的过程,便捷了扫地机器人的使用方式。
27.2.垃圾经由清扫部清扫后均收集在扫地机本体内的收集箱中,使得扫地机本体具有暂存垃圾的功能,通过封闭板的设置,使得垃圾进去收集箱后,难以再次抖出来。
28.3.扫地机本体底部的安装槽既可以安装转动扫又可以光流传感器,使得扫地机本体的适用性更强,通过安装槽以及转动扫、光流传感器的配合设置,使用者可以根据地面类别对扫地机本体进行调整,需要辅助清理,则安装多些转动扫;需准确清理,则安装多些光流传感器。
附图说明
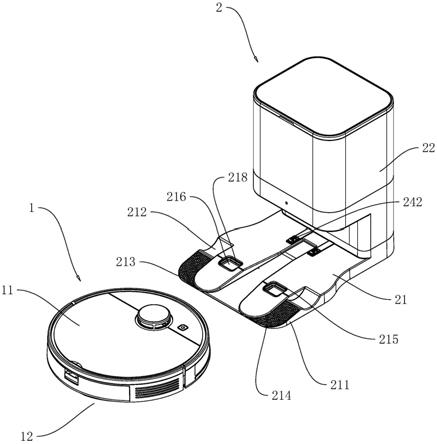
29.图1是本技术实施例中的整体结构示意图。
30.图2是本技术实施例中的侧壁角度整体结构示意图。
31.图3是本技术实施例中扫地机本体底部视角结构示意图。
32.图4是本技术实施例中扫地机本体拆除部分结构后的部分内胆示意图。
33.图5是本技术实施例中收集箱整体结构示意图。
34.图6是本技术实施例中另一角度的收集箱整体结构示意图。
35.图7是本技术实施例中拆除铰接板后的收集箱结构示意图。
36.图8是本技术实施例中拆除收集筒外部壳结构后的扫地机垃圾集成筒结构示意图。
37.图9是本技术实施例中储料袋与卡槽的配合结构示意图。
38.附图标记说明:1、扫地机本体;11、壳体;
12、座体;131、主动轮组;132、万向从动轮组;141、清扫壳;142、底部开口;143、转辊刷;144、侧壁开口;145、接通管;150、收集箱;151、入料口;152、橡胶贴;153、铰接板;154、握持把手;155、封闭板;1551、弧形条;1552、凸挂部;1553、倒钩;156、排出口;1561、内环;157、密闭板;158、安装槽;1581、转动扫;1582、光流传感器;2、扫地机垃圾集成筒;21、装配座;211、入库坡;212、定位槽;213、橡胶垫;214、防滑纹;215、吸入口;216、预设槽道;217、连通管;218、外环;219、缓冲环;22、收集筒;222、存放箱;223、储料袋;224、抽风口;225、进料口;2261、基板;2262、插板;2263、第一通口;2264、插入槽;2265、第二通口;227、卡槽;23、负压装置;241、充电子接头;242、充电母接头。
具体实施方式
39.以下结合附图1
‑
9对本技术作进一步详细说明。
40.实施例1:本技术实施例公开一种扫地机器人。
41.参照图1,一种扫地机器人,包括有两大部分,其一为可活动的扫地机本体1、第二为一般在室内的固定位置放置的扫地机垃圾集成筒2,在本实施例中,扫地机本体1对地面进行清扫后、将垃圾暂存在扫地机本体1内,扫地机本体1驶回扫地机垃圾集成筒2处,扫地机垃圾集成筒2对扫地机本体1内的垃圾进行抽吸转移,使得垃圾从扫地机本体1处转存至扫地机垃圾集成筒2内。
42.具体地,参照图1、图2,在本实施例中,扫地机本体1整机包括有壳体11、座体12以及位移部件,壳体11与座体12相装配盖合且采用卡合连接、螺栓连接等方式进行装配固定,位移部件安装在座体12的底部,在本实施例中,位移部件包括有主动轮组131以及万向从动轮组132,在本实施例中,在主动轮组131具有包括有两个同轴联动设置的主动轮,在座体12内设置有动力装置,动力装置采用电机,电机作为动力源配合齿轮组、蜗轮蜗杆等传动结构带动主动轮进行运动从而使得扫地机本体1可以进行位移。
43.参照图2、图3,在座体12内还设置有清扫部以及暂存部,其中,清扫部包括有清扫壳141,清扫壳141安装在座体12的底部位置处,清扫壳141具有底部开口142,底部开口142与地面相连通,在底部开口142位置处转动安装有转辊刷143,同时,在座体12内还安装有清理动力源,在本实施例中,清理动力源包括有电机以及风机,转辊刷143通过齿轮组、轴体轴承等传动结构与清理动力源中的电机相装配而进行转动,对地面进行转动清扫,并且,风机的输出端,即,吸入端与清扫壳141相连接,风机运作时产生的负压可以将地面的垃圾吸入
至清扫壳141中。
44.在本实施例中,参照图3、图4,清扫壳141还具有侧壁开口144,清扫壳141的侧壁开口144位置处安装有接通管145,暂存部设置在接通管145远离清扫壳141的一侧管口位置处,暂存部在本实施例中包括有收集箱150(参照图5),收集箱150采用卡接的方式安装在座体12上,收集箱150具有入料口151,入料口151与接通管145管口之间相对接从而将清扫壳141与收集箱150相接通,并在接通管145管口与入料口151之间安装有橡胶贴152,提高入料口151与接通管145管口之间的摩擦力以及吸附程度。
45.在本实施例中,参照图4、图5,收集箱150接有接通管145的一侧内壁为两段斜面结构,由清扫壳141至收集箱150方向指向,收集箱150接有接通管145的一侧内壁截面呈“乁”状,接通管145处于“乁”状内壁的下段位置处,而收集箱150正对接通管145的一侧内壁为直面结构,由于清扫壳141与收集箱150之间通过接通管145、清扫壳141的侧壁开口144以及收集箱150的入料口151相接通,风机持续运作时产生的负压可以将垃圾从清扫壳141中吸入至收集箱150中进行垃圾的暂存。
46.参照图5、图6,其中,收集箱150接有接通管145的一侧内壁以及收集箱150正对接通管145的一侧内壁之间的内部结构配合,使得垃圾可以较好、较多地储存在收集箱150内,进一步地,在收集箱150正对接通管145的一侧内壁为可开启的铰接板153结构,同时,在收集箱150的顶部开口位置处铰接安装有握持把手154,在需要时可以将扫地机本体1的壳体11从座体12上拆除,通过人手将收集箱150取出、对收集箱150内的垃圾进行人工清理。
47.参照图6、图7,为了在扫地机本体1非工作状态时、对收集箱150内部进行密闭,在入料口151位置处设置有封闭板155,具体地,在收集箱150的“乁”状内壁位置处水平对称安装有两条弧形条1551,弧形条1551的一端与收集箱150的内顶壁相固定、另一端则与“乁”状内壁的交线处相固定,同时,在封闭板155上安装对称安装有凸挂部1552,凸挂部1552整体呈“l”状条体,两凸挂部1552的非与封闭板155相固定的一端朝向相反,凸挂部1552靠近封闭板155的一侧设置有倒钩1553,封闭板155通过凸挂部1552可摆动地挂设在两弧形条1551上,在风机运作时,产生的负压可以吹开封闭板155、从而将垃圾从清扫壳141中吸入至收集箱150中进行垃圾的暂存;在风机未运作时,封闭板155在“乁”状内壁中受到重力影响可以对入料口151进行密闭,有效减少垃圾的外溢。
48.在收集箱150的底部设置有排出口156,在本实施例中,收集箱150的底部具有对称设置的两个排出口156,排出口156位置处活动安装有密闭板157,具体地,在排出口156处固定有内环1561,密闭板157铰接在内环1561底部,密闭板157的铰接部位置处套设有扭簧,在非受外力状态下,在扭簧的作用下密闭板157与内环1561处于紧贴状态。
49.参照图3,为了提升扫地机本体1的清扫能力,在扫地机本体1的底部开设有多个安装槽158,在扫地机本体1底部设置有用于辅助地面清理的转动扫1581,转动扫1581采用螺纹连接的方式可拆卸式安装在安装槽158内,扫地机本体1底部设置有光流传感器1582,光流传感器1582同样采用螺纹连接的方式可拆卸式安装在安装槽158内,在本实施例中,扫地机本体1的底部具有三个安装槽158,一般情况下其中两个安装转动扫1581、剩余一个安装光流传感器1582,如需对毛毯、地毯等多层或者多毛绒结构进行清理,则可以拆除一个或者两个转动扫1581,装配上对应的光流传感器1582,提高扫地机本体1对地面的识别能力,清扫部可以加强转辊刷143的转数或者风机的吸力,从而有效提高对该类别地面的清理能力。
50.在本实施例中,参照图8、图9,扫地机垃圾集成筒2整体包括有装配座21以及收集筒22,装配座21与收集筒22之间采用卡合或者螺纹连接等方式进行固定连接,装配座21位于收集筒22的下方侧壁位置处,在收集筒22内部安装有负压装置23,在本实施例中,负压装置23采用真空泵,在收集筒22内部且处于负压装置23的上方安装有存放部,在本实施例中,存放部包括有存放箱222,存放箱222的体积大于收集箱150的体积,存放箱222的底壁贯穿开设有抽风口224,负压装置23的输出端与抽风口224相装配,使得存放箱222内部环境的压强可以由负压装置23进行改变。
51.其次,参照图8、图9,在装配座21上、由远离收集筒22至靠近收集筒22方向依次设置有倾斜向上的入库坡211以及呈凹陷状的定位槽212,入库坡211远离收集筒22的一端面为最低面,入库坡211的顶面铺设有橡胶垫213,橡胶垫213顶部开设有防滑纹214,扫地机本体1可以从入库坡211处驶入,定位槽212在本实施例中可以采用弧形状的凹陷槽,定位槽212与主动轮的大小尺寸相适配,扫地机本体1驶入入库坡211后以主动轮恰好抖下卡入定位槽212为到达行驶终点位置。
52.同时,参照图8、图9,在装配座21远离收集筒22的一侧顶面位置处开设有吸入口215,在装配座21的内部开设有预设槽道216,预设槽道216与吸入口215相接通,在预设槽道216远离吸入口215的一端口安装有连通管217,在存放箱222的内壁贯穿开设有进料口225,连通管217与存放箱222相固定,连通管217远离预设槽道216的一端口与进料口225相接通,吸入口215的顶部安装有外环218,外环218上贴设有缓冲环219,装配座21上的吸入口215与扫地机本体1底部的排出口156大小尺寸相一致,外环218的大小尺寸大于内环1561的大小尺寸,扫地机本体1的主动轮抖下卡入凹陷槽后,外环218能够恰好包围内环1561,使得装配座21上的吸入口215与扫地机本体1底部的排出口156两者进行连通,负压装置23工作时,对扫地机本机内的垃圾进行吸入,由于负压装置23造成的压力差,可以使得与内环1561处于紧贴状态的密闭板157打开,处于收集箱150内的垃圾可以经由排出口156、吸入口215、预设槽道216、连通管217、进料口225后转移进入至存放箱222内。
53.参照图8、图9,为了方便对垃圾进行收集以及及时清理,在本实施例中,存放部还包括有储料袋223,储料袋223在本实施例中采用除尘滤袋,其中,储料袋223可拆卸式设置在进料口225位置处,具体地,在储料袋223的袋口处设置有卡板,在进料口225位置处设置有与大小尺寸卡板相适配的卡槽227,卡槽227具有上开口,储料袋223与存放箱222为由上至下相卡合设置,并且,在本实施例中,卡板包括有基板2261以及插板2262,基板2261与储料袋223相装配,基板2261具有第一通口2263,储料袋223内部空间与第一通口2263相接连,基板2261的内部开设有插入槽2264,插板2262插入连接在插入槽2264内,插板2262具有第二通口2265,负压装置23处于工作状态时,进料口225与第一通口2263、第二通口2265相连通,使得垃圾可以由扫地机本体1中转移至储料袋223内进行收集。
54.其次,参照图1、图2,在扫地机本体1的底部伸出有充电子接头241,在装配座21顶壁伸出有充电母接头242,充电子接头241与充电母接头242相适配,扫地机本体1在驶入扫地机垃圾集成筒2后,可以在转移垃圾的同时进行能源补给。
55.在本实施例中,扫地机本体1通过转辊刷143以及转动扫1581对地面进行清扫,结合风机以及真空泵,对地面垃圾进行吸入、转移,将垃圾暂存在扫地机本体1上,并在需要清理垃圾的时候,将垃圾转移至扫地机垃圾集成筒2内进行统一收集处理。
56.实施例2:本实施例与其余实施例的不同之处在于,储料袋223与存放箱222之间的安装结构不一样。
57.在本实施例中,储料袋223的袋口处设置有安装板,在进料口225位置处设置有安装座,安装板背离储料袋223的一侧安装有塑料倒钩1553,安装座背离进料口225的一侧开设有与塑料倒钩1553相配合的钩座,安装板的板体上开设有第三通口,储料袋223内部空间与第三通口相接连。
58.同时,在安装座背离进料口225的一侧还贴设有第一磁性贴、在安装板背离储料袋223的一侧贴设有第二磁性贴,第一磁性贴与第二磁性贴之间磁性相反。
59.实施例3:本实施例与其余实施例的不同之处在于,封闭板155与收集箱150的安装结构不一样。
60.在本实施例中,封闭板155通过转轴连接的方式安装在收集箱150的内部,其中,在转轴的轴体与封闭板155的配合位置处套设有扭簧件,在非受力情况下,由于扭簧件的作用可以使得封闭板155贴合在收集箱150的内壁位置处。
61.以上均为本技术的较佳实施例,本实施例仅是对本技术做出的解释,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1