清洁设备的控制方法、装置及清洁设备与流程
本发明是关于一种清洁设备,特别是关于一种清洁设备的控制方法、装置及清洁设备。
背景技术:
1、目前,市面上洗地机的刮水条是固定在底座上面的,这种方式存在一些缺陷,比如自清洁开始时,由于刮条与滚刷存在一定的过盈量,影响滚刷对清水的吸收,以及自清洁过程中,由于刮条和滚刷过盈量偏低,导致刮条对污水的挤出不彻底,导致自清洁效率低,影响用户使用感受。
2、公开于该背景技术部分的信息仅仅旨在增加对本发明的总体背景的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域一般技术人员所公知的现有技术。
技术实现思路
1、本发明的目的在于提供一种清洁设备的控制方法、装置及清洁设备,其能根据清洁设备的目标工作模式来控制滚刷执行对应的工作任务,并控制刮条进行位移以使滚刷及刮条满足对应的相对位置(增加或减小刮条与滚刷的过盈量),实现在自清洁时让滚刷充分吸收清水或充分释放污水,提高自清洁的效率。
2、为实现上述目的,本发明的实施例提供了一种清洁设备的控制方法,所述清洁设备包括滚刷及刮条,所述清洁设备的控制方法包括:
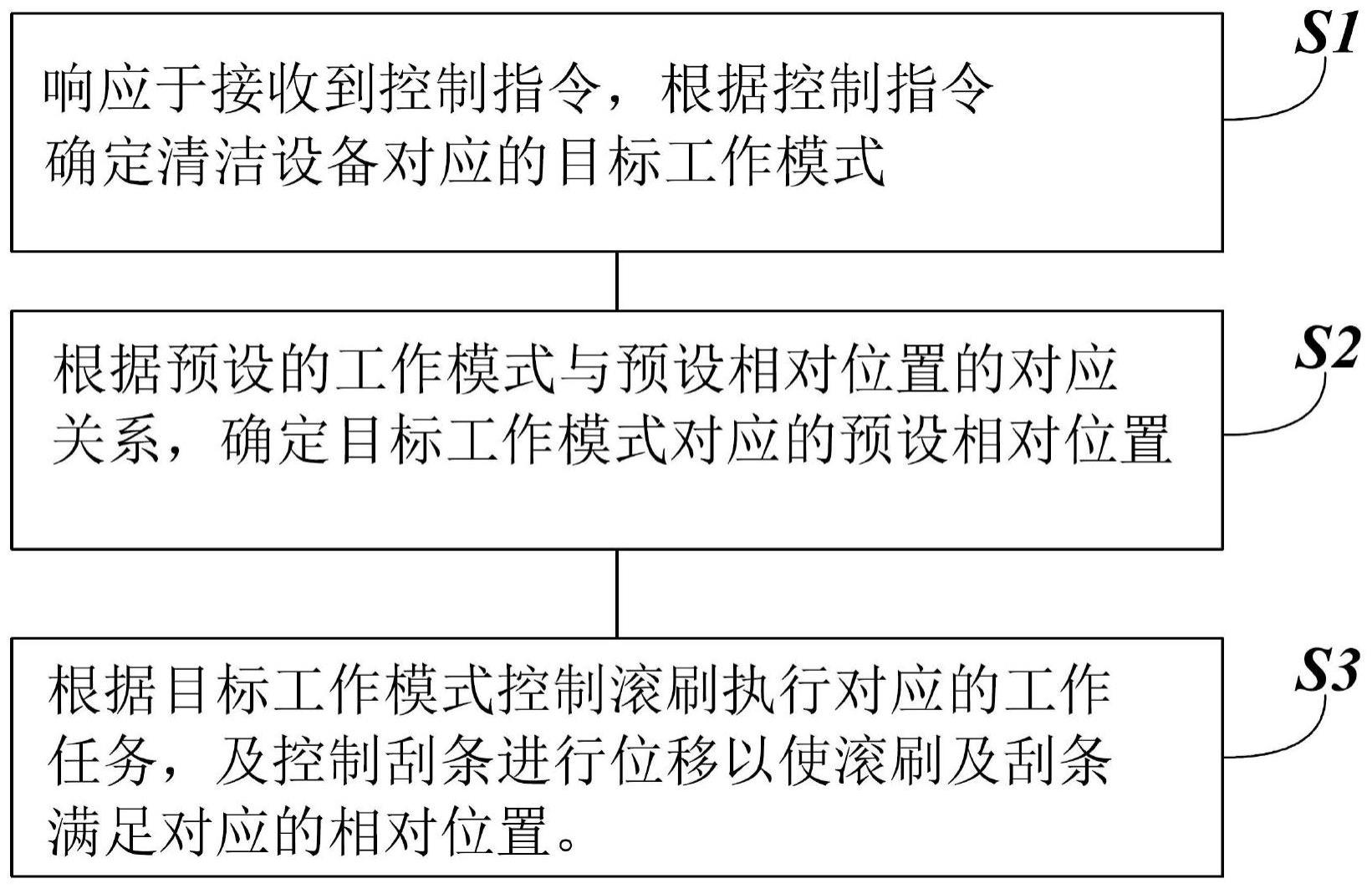
3、响应于接收到控制指令,根据所述控制指令确定所述清洁设备对应的目标工作模式;
4、根据预设的工作模式与预设相对位置的对应关系,确定所述目标工作模式对应的所述预设相对位置,所述预设相对位置用于描述所述滚刷及所述刮条间的相对位置关系;
5、根据所述目标工作模式控制所述滚刷执行对应的工作任务,及控制所述刮条进行位移以使所述滚刷及所述刮条满足对应的所述相对位置。
6、在本发明的一个或多个实施方式中,所述目标工作模式包括自清洁模式,所述自清洁模式对应的工作任务包括吸水子任务及排污子任务,所述预设相对位置包括第一相对位置及第二相对位置,所述根据所述目标工作模式控制所述滚刷执行对应的工作任务,及控制所述刮条进行位移以使所述滚刷及所述刮条满足对应的所述相对位置,包括:
7、在所述目标工作模式为自清洁模式时,控制所述滚刷执行吸水子任务,及控制所述刮条进行位移以使所述滚刷及所述刮条满足所述第一相对位置,所述第一相对位置包括所述刮条与所述滚刷相接触或所述刮条远离所述滚刷;
8、响应于检测到所述滚刷满足预设条件或响应于接收到用户指令,控制所述滚刷执行排污子任务,及控制所述刮条进行位移以使所述滚刷及所述刮条满足所述第二相对位置,所述第二相对位置包括所述滚刷与所述刮条间过盈配合且所述滚刷与所述刮条间的过盈量满足第一过盈量。
9、在本发明的一个或多个实施方式中,所述目标工作模式还包括洗地模式,所述预设相对位置包括第三相对位置,所述根据所述目标工作模式控制所述滚刷执行对应的工作任务,及控制所述刮条进行位移以使所述滚刷及所述刮条满足对应的所述相对位置,包括:
10、在所述目标工作模式为洗地模式时,控制所述滚刷执行洗地任务,及控制所述刮条进行位移以使所述滚刷及所述刮条满足所述第三相对位置,所述第三相对位置包括所述滚刷与所述刮条间过盈配合且所述滚刷与所述刮条间的过盈量满足第二过盈量,所述第二过盈量小于所述第一过盈量。
11、在本发明的一个或多个实施方式中,所述第一过盈量的取值范围为1-1.4mm,所述第二过盈量的取值范围为0.5-0.7mm。
12、在本发明的一个或多个实施方式中,所述响应于检测到所述滚刷满足预设条件,控制所述滚刷执行排污子任务,及控制所述刮条进行位移以使所述滚刷及所述刮条满足所述第二相对位置,包括:
13、响应于检测到所述滚刷执行吸水子任务的持续时间满足预设吸水时间阈值,控制所述滚刷执行排污子任务,及控制所述刮条进行位移以使所述滚刷及所述刮条满足所述第二相对位置;和/或
14、响应于检测到所述滚刷的吸水量满足预设水量阈值,控制所述滚刷执行排污子任务,及控制所述刮条进行位移以使所述滚刷及所述刮条满足所述第二相对位置;和/或
15、响应于检测到所述滚刷的持续清洁时间满足预设清洁时间阈值,控制所述滚刷执行排污子任务,及控制所述刮条进行位移以使所述滚刷及所述刮条满足所述第二相对位置;和/或
16、响应于检测到所述滚刷的清洁程度满足预设清洁条件,控制所述滚刷执行排污子任务,及控制所述刮条进行位移以使所述滚刷及所述刮条满足所述第二相对位置。
17、在本发明的一个或多个实施方式中,所述清洁设备上设置有图像采集及处理机构和/或感应机构,所述响应于检测到所述滚刷满足预设条件,控制所述滚刷执行排污子任务,及控制所述刮条进行位移以使所述滚刷及所述刮条满足所述第二相对位置,包括:
18、通过所述图像采集及处理机构获取并判断所述滚刷的清洁状态,根据所述滚刷的清洁状态确定所述滚刷是否满足所述预设条件;和/或,
19、通过所述感应机构感应所述滚刷的重量情况,根据所述滚刷的重量情况确定所述滚刷是否满足所述预设条件。
20、在本发明的一个或多个实施方式中,所述清洁设备上设置有计时装置,用于记录所述滚刷执行吸水子任务的持续时间和/或记录所述滚刷的持续清洁时间,所述响应于检测到所述滚刷满足预设条件,控制所述滚刷执行排污子任务,及控制所述刮条进行位移以使所述滚刷及所述刮条满足所述第二相对位置,包括:
21、通过获取的所述计时装置记录的所述滚刷执行吸水子任务的持续时间和/或所述滚刷的持续清洁时间,来确定所述滚刷是否满足所述预设条件。
22、本发明的又一实施例提供了一种控制装置,应用于清洁设备,所述清洁设备包括滚刷及刮条,所述控制装置包括:
23、接收识别模块,用于接收控制指令并识别所述控制指令对应的所述清洁设备的目标工作模式;
24、确定模块,用于根据预设的工作模式与预设相对位置的对应关系,确定所述目标工作模式对应的所述预设相对位置,所述预设相对位置用于描述所述滚刷及所述刮条间的相对位置关系;
25、控制模块,根据所述目标工作模式控制所述滚刷执行对应的工作任务,及控制所述刮条进行位移以使所述滚刷及所述刮条满足对应的所述相对位置,从而执行清洁作业。
26、在本发明的一个或多个实施方式中,所述清洁设备上设置有图像采集及处理机构和/或感应机构和/或计时装置,所述控制模块根据所述图像采集及处理机构获取的所述滚刷的清洁状态,和/或,所述感应机构感应所述滚刷的重量情况,和/或,所述计时装置所记录的所述滚刷执行吸水子任务的持续时间或所述滚刷的持续清洁时间,控制所述滚刷执行对应的工作任务,及控制所述刮条进行位移以使所述滚刷及所述刮条满足对应的所述相对位置,从而控制所述清洁设备执行清洁作业。
27、本发明的又一实施例还提供了一种清洁设备,包括滚刷,刮条以及控制装置。
28、所述刮条与所述滚刷之间的距离可调节。
29、所述控制装置用于:
30、响应于接收到控制指令,根据所述控制指令确定所述清洁设备对应的目标工作模式;
31、根据预设的工作模式与预设相对位置的对应关系,确定所述目标工作模式对应的所述预设相对位置,所述预设相对位置用于描述所述滚刷及所述刮条间的相对位置关系;
32、根据所述目标工作模式控制所述滚刷执行对应的工作任务,及控制所述刮条进行位移以使所述滚刷及所述刮条满足对应的所述相对位置。
33、与现有技术相比,本发明实施方式的清洁设备的控制方法、控制装置及清洁设备,其能根据清洁设备的目标工作模式(自清洁模式/洗地模式)来控制滚刷执行对应的工作任务(吸水子任务/排污子任务/洗地任务),并控制刮条进行位移以使滚刷及刮条满足对应的相对位置(增加或减小刮条与滚刷的过盈量),实现在自清洁时让滚刷充分吸收清水或充分释放污水,提高自清洁的效率。
- 还没有人留言评论。精彩留言会获得点赞!